基于stm32的机器人直驱关节阻抗控制研究毕业论文
2021-11-27 22:31:57
论文总字数:21005字
摘 要
传统机器人关节模组采用的电机加减速器方案,无法满足越来越高的精度要求,这使得无需减速器的电机直驱方案越来越受欢迎。随着机器人的广泛应用,对于需要与环境频繁交互的场合,为了提高其交互过程中的安全性,要求机器人关节具有一定的柔顺性。阻抗控制建立了位置和力的动态响应关系,将外界的干扰转换为具有阻抗形式的扰动响应,而改变阻抗还可以调节机器人与外界环境的动态关系。阻抗控制实现了主动柔顺,这很好地满足机器人与周围环境之间的动态交互要求。本课题研究了基于直驱方案的机器人单关节作动器组成结构,设计并调试其基于STM32的控制系统电路和电机驱动电路。根据控制性能要求选择了阻抗控制策略,通过Simulink搭建阻抗控制框图,根据仿真结果分析阻抗参数对阻抗控制的影响。
关键词:单关节作动器;直接驱动;STM32;阻抗控制;Simulink
Abstract
The motor plus reducer scheme used in the traditional robot joint module can not meet the higher and higher precision requirements, which makes the motor direct drive scheme without reducer more and more popular. With the wide application of robot, for the occasions that need to interact with the environment frequently, in order to improve the safety of the interaction process, robot joints are required to have a certain degree of flexibility. Impedance control establishes the dynamic response relationship between position and force, which converts the external interference into disturbance response in the form of impedance, and changing the impedance can also adjust the dynamic relationship between the robot and the external environment[2]. The impedance control achieves active compliance, which well meets the requirements of dynamic interaction between the robot and the surrounding environment. In this paper, the structure of robot single joint actuator based on direct drive scheme is studied, and the control system circuit and motor drive circuit based on STM32 are designed and debugged. According to the control performance requirements, the impedance control strategy is selected, the impedance control block diagram is built by Simulink, and the influence of impedance parameters on impedance control is analyzed according to the simulation results.
Key words: single joint actuator; direct drive; STM32; impedance control; Simulink
目录
摘要 I
Abstract II
第1章 绪论 1
1.1课题的背景和研究意义 1
1.2电机发展现状 1
1.3阻抗控制研究现状及实现方法 3
1.4全文章节安排 4
第2章 阻抗控制仿真的基本原理 5
2.1力矩控制 5
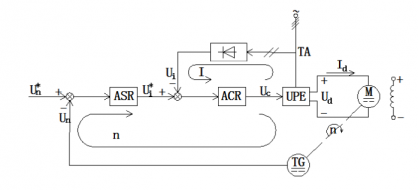
2.3双闭环控制系统 8
2.3阻抗控制原理 8
第3章 关节模组整体选择设计 10
3.1驱动装置 10
3.2传动和制动装置 11
3.3关节控制器 12
3.4关节模组实例 12
第4章 基于STM32的关节电路设计 14
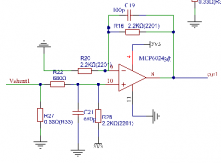
4.1控制电路的设计 14
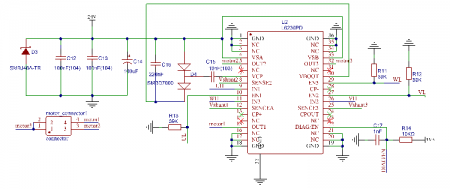
4.2驱动电路的设计 16
第5章 阻抗控制的MATLAB仿真 21
总结 26
参考文献 27
致谢 28
第1章 绪论
1.1课题的背景和研究意义
自从机器人被研发到广泛应用以来,对人们的生活方式和工作性质造成了很大的改变,机器人的发展和研究水平体现了一个国家工业化的发展水平和工业制造能力,我国也不甘落后的研究开发智能的机器人项目,来研发设计机器人系统,以追赶国外先进的技术,以满足对机器人的需求。随着人们对机器人的要求和应用的不断提高,对机器人技术也有着相应的要求,机器人的发展越来越智能和实用,其中机器人关节是机器人的基础且极为重要的部件,且每个机器人中都包含着大量的关节模组,机器人关节模组直接影响机器人,因此一个优秀的关节模组对机器人来说显得尤为重要,现在随着机器人技术的不断发展,对关节模组也提出了越来越高的要求。
现如今,随着机器人越来越多的被投入工厂,对实现机器人-环境物理交互也有了新的要求,迫切需要解决驱动关节体积灵活性,准确性等性能,对于机器人关节模组采用电机加减速器的设计方案,且该方案被各国研究使用,并设计制造了各式的减速器如谐波减速器和RV减速器,该方案虽提升了扭矩输出,但同时却降低了电机端对力矩的感知能力,且电机加减速器的传动由于存在传动间隙,会造成累计误差,从而影响精度此外,减速器和其附带的部件所造成的故障也会造成问题。因此,去掉减速器,令电机与杆件直接相连的直驱方案开始被人们开发并应用到机器人中来,采用直驱电机作为驱动的动力,可以很好的提高机器人的可靠性和稳定性,由于没有传动装置,就可以减少大量的维护时间,提高机器人的精度,同时通过阻抗调节控制参数实现不同的阻抗效果。阻抗控制是对末端执行器的位置和力之间的误差调节的动态关系实现的[1],能适应复杂变化的环境,能更加适合的完成工作,因此,利用阻抗控制来控制直接驱动电机已经受到广大学者的认可并开始研究应用。
1.2电机发展现状
在1975年前,机器人的电机主要采用步进电机、电液脉冲马达驱动,但因其各方面性能都存在问题,直流电机因控制简单、易调速、易实现闭环负反馈控制的优点逐步替代其位置,直到1985年以后,交流电机的出现,因结构简单、几乎不需要维护且可以通过技术如基于矢量控制理论和SPWM技术的正弦波输出控制实现与直流电机类似的性能,更快速更高精度更小体积使其现如今的发展主流,国外的交流伺服电机品牌如欧系(伦茨、Lust、博世力士乐)日系(摩川、安川、松下、三菱)[2],国内的有华中数控、兰州电机、广州 数控等。
数控等。
图1.1 伟创VM7伺服电机
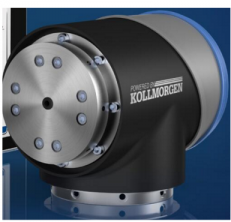
 这些电机都要配上相应的减速器才能构成执行器,现在,由于机器人对驱动电机的要求的提高,由于直驱电机的高寿命、高精度和高扭转的巨大优势,通过电机直接驱动传动部件的研究越来越受欢迎。直驱电机如内置力矩电机和直线电机等。
这些电机都要配上相应的减速器才能构成执行器,现在,由于机器人对驱动电机的要求的提高,由于直驱电机的高寿命、高精度和高扭转的巨大优势,通过电机直接驱动传动部件的研究越来越受欢迎。直驱电机如内置力矩电机和直线电机等。
图1.2 直线电机
直线电机从提出到现在已经160年,最初是由Wheatsone提出和制作了最早的直线电机。但是由于当时控制器的发展水平不足,其又对控制器的要求却很高,所以并未得到广泛的应用,随着人们对于直线电机的研究与不断地尝试,,直线电机的理论和应用得以快速发展,直线电机已经能被广泛应用并得到了人们的认可,其率先在高速机床中实现工业应用,并迅速大面积进入工业领域。随着机器人对于电机的要求的提高和直线电机的丰富的理论和实践,其开始应用在了机器人的领域,如1997年日本的SIDM型微型直线压电电机;2006年德国的多款直线压电微电机如P-652型;2006年瑞典的PiezoLEGS直线电机,而中国对于直线电机的研究就相对进展较慢,对于直线电机的研究与国外仍有较大的差距,在应用于机器人方面,国内之前在尝试研究人工肌肉驱动器,在将直线电机应用在在机器人方面与国外依然有很大差距。但是我国的电机也是在不断的发展和进步,其中以国奥科技为例,经过国内多个专家学者的不懈努力和刻苦钻研,使我国已经能自主研发直驱系列的电机,为我国的电机事业迈出了很大的一步。
1.3阻抗控制研究现状及实现方法
为了解决机器人通过动态相互作用与环境进行能量交换的问题,雷柏特和克雷格提出“混合位置和力控制”,后来梅森在此基础上提出了梅森的柔量控制方法,这种方法中,位置控制在位置控制子空间内,力控制在力控制子空间内,忽略了机器人与环境的动态耦合。霍根[3]提出的“阻抗控制”解决了这个问题,建立了位置与力之间的动态关系。安德森和spong提出了一种内外环控制策略,内环基于力对消的反馈线性化,外环类似于位置控制子空间阻抗控制的经典混合位置和力控制器。刘和戈登伯格在位置控制子空间中提出了一种具有阻抗控制和力控制子空间期望惯性和阻尼的鲁棒混合控制器,用于改善动力学行为。
图1.3所示基于力的阻抗控制又被称为狭义的阻抗控制,其对象是力控制[4]。它是根据期望位置、实际位置和外力得到输出力,得到的输出力作用于对象模型,因此其是有力作为内环,和阻抗控制外环组成。其对于动力学的模型的要求比较高,对于比较恶劣的环境其动力学模型的误差就会变大,进而会使其控制的效果变差。
图1.3 阻抗控制的实现
其动力学公式为:
(1.1)
图1.4所示基于位置的阻抗控制也被称为导纳控制,其对象是位置控制,它是根据期望位置、实际位置及位置修正量来使实际位置去跟踪期望位置[5],可见其实际位置是在不断变化调整的。其是有位置控制内环和阻抗控制外环构成。
图1.4 导纳控制的实现
其动力学公式为:
(1.2)
式(1.2)中的参数,为机器人的目标惯性,对有大加速度的高速运动或会产生冲力的运动影响较大,为机器人目标阻尼,对中速运动或存在较强干扰时影响较大,为目标刚度,对平衡状态附近的低速运动影响较大[6]。
1.4全文章节安排
本文主要是基于STM32的机器人直驱关节阻抗控制研究,主要内容是首先在第1章介绍课题背景、研究意义、电机发展现状和阻抗控制的相关研究。在第2章介绍了阻抗控制的内环和外环的设计及模型搭建中所用的原理。随后第3章将机器人的关节的器件的选择、功能,并对各个部分的所用器件的优劣做了对比,阐明所用器件的优势,掌握关节的组成和运作原理为后面的电路设计做准备。第4章对基于STM32的关节电路的设计展开叙述,主要是对控制器的控制电路和电机的驱动电路的设计做了详细介绍,还包括STM32的最小系统的介绍等。第5章介绍的就是阻抗控制的Simulink仿真,分析仿真的结果及不足之处及参数的影响比较。最后对全文进行了总结。
第2章 阻抗控制仿真的基本原理
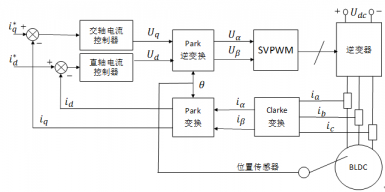
2.1力矩控制
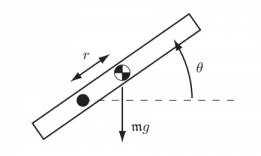 力矩控制是基于动力学模型的一种高性能的伺服控制,对于力矩控制,加上弹性体之后就会变成位置控制,所以这里对力矩控制一般采用现在技术和理念都较为成熟的位置控制来代替,在对于位置控制时,常采用PD控制加前馈控制的控制方式来对其进行一定的控制,具体原因后文中有详细的介绍。其实对力矩的控制在本质上是对电机的电流进行控制,所以并未采用力矩传感器,其缺点是传动装置的存在会使相同电流对应的实际力矩值与期望的力矩值有较大的偏差,但是采用直驱电机就会去掉传动装置,从而消除这个误差,从而使电流对力矩进行较为精确地控制。在考虑图2.1单个电机与连杆的模型时,
力矩控制是基于动力学模型的一种高性能的伺服控制,对于力矩控制,加上弹性体之后就会变成位置控制,所以这里对力矩控制一般采用现在技术和理念都较为成熟的位置控制来代替,在对于位置控制时,常采用PD控制加前馈控制的控制方式来对其进行一定的控制,具体原因后文中有详细的介绍。其实对力矩的控制在本质上是对电机的电流进行控制,所以并未采用力矩传感器,其缺点是传动装置的存在会使相同电流对应的实际力矩值与期望的力矩值有较大的偏差,但是采用直驱电机就会去掉传动装置,从而消除这个误差,从而使电流对力矩进行较为精确地控制。在考虑图2.1单个电机与连杆的模型时,
请支付后下载全文,论文总字数:21005字
相关图片展示: