基于阻抗控制的动力工具力矩控制毕业论文
2021-11-27 22:32:17
论文总字数:19986字
摘 要
螺栓连接部件是目前工业机械连接设备非常常见的一种连接结构紧固件,螺栓组合连接部件拆卸方便,连接结构紧固,常用于螺栓连接主体受力复杂的部件和重要的接头处,它的受用环境和受力特性表明在此类连接中螺栓往往是薄弱环节。
为使连接螺栓的紧密型、刚性、疲劳寿命和放松性的能力进一步增强,大多数的螺栓连接在装配的过程时候必须施加稳定可靠的螺栓预紧力。所施加的螺栓预紧力既要能够满足螺栓的连接件强度和稳定性要求,又必须要能够保证螺栓连接的稳定质量和安全要求,阻抗控制螺栓连接是重要的流体动力学和控制螺栓连接方法之一。
抵抗外力的冲击,利用弹性元件作为系统的机械频率滤波器,可以把系统负载所受的机械频率冲击吸收,当达到冲击吸收频率大于SEA的频率时,系统的阻抗将会随之降低至相当于弹性元件的刚度。
本文将根据螺栓紧固的规律设计紧固工具控制系统,依据紧固工具的关键器件设计紧固工具的底层驱动电路及控制电路。根据SEA特性,设计基于双闭环直流调速系统的力矩控制算法,并用Simulink对力矩控制算法进行仿真。
关键词:螺栓连接;力矩控制;SEA;电动螺栓紧固工具;阻抗控制
Abstract
Bolt connecting parts is the very common kind of industrial mechanical connection devices connected structure fasteners, bolt combination connection parts disassemble, fastening connection structure, often used in bolted body stress complex parts and important junction, its environment and mechanical characteristics show that leaves in this kind of connection bolt is often weak links.
In order to further enhance the fastening, rigidity, fatigue life and relaxation ability of connection bolts, most bolt connections must apply stable and reliable bolt preload during assembly. The pre-tightening force applied should not only satisfy the strength and stability requirements of the bolt connection, but also guarantee the stable quality and safety requirements of the bolt connection. Impedance control bolt connection is one of the important methods of fluid dynamics and control bolt connection.
To resist the impact of external forces, the elastic element can be used as the mechanical frequency filter of the system to absorb the mechanical frequency impact of the system load. When the shock absorption frequency is greater than the frequency of SEA, the impedance of the system will be reduced to the stiffness equivalent to the elastic element.
This paper will design the fastening tool control system according to the rule of bolt fastening, and design the underlying driving circuit and control circuit of the fastening tool according to the key components of the fastening tool. According to SEA characteristics, a torque control algorithm based on the double closed-loop dc speed regulation system is designed, and Simulink is used to simulate the torque control algorithm.
Key words: Bolt connection; Torque control; SEA; Electric bolt fastening tools; Impedance control
目录
摘要 I
Abstract II
第一章 绪论 1
1.1 研究的目的及意义 1
1.2 国内外研究现状 2
1.2.1紧固工具发展及研究现状 2
1.2.2阻抗控制研究现状 3
1.2.3串联弹性元件(SEA)研究现状 4
第二章 基于SEA的紧固工具结构设计 6
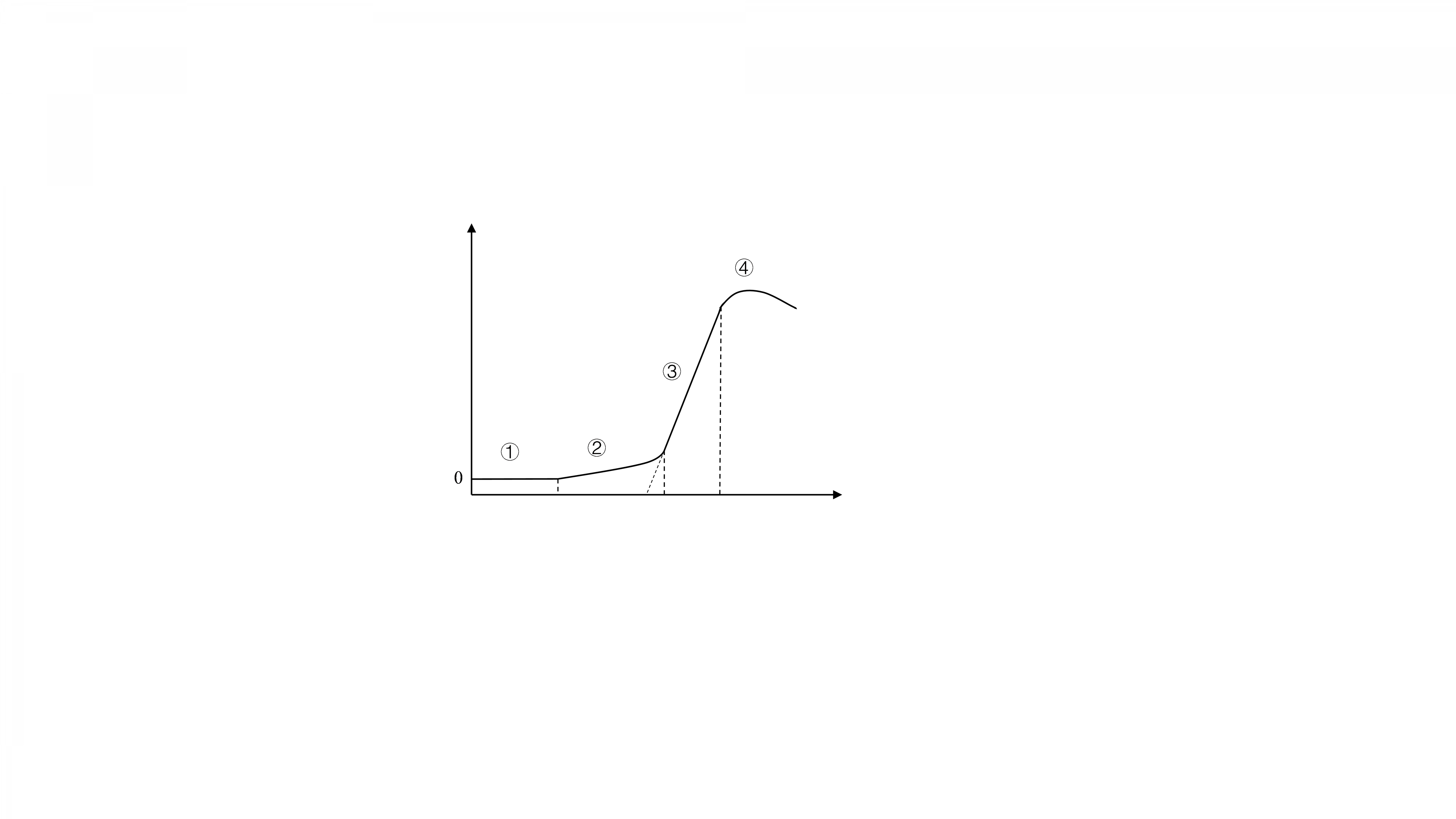
2.1螺栓紧固工艺过程及力矩要求 6
2.1.1螺栓紧固工艺过程 6
2.1.2 紧固螺栓力矩要求 8
2.2 SEA的设计原理 10
2.3动态模型的建立 10
第三章 紧固工具力矩控制系统设计 13
3.1控制系统底层电路设计 13
3.1.1电机的选型 13
3.1.2驱动电路设计 14
3.1.3控制电路设计 16
3.2基于SEA的力控制算法设计 18
第四章 基于SEA的力控制算法仿真 21
4.1仿真模型的搭建 21
4.2仿真结果分析 22
第五章 总结 25
总结 25
参考文献 26
致谢 28
绪论
研究的目的及意义
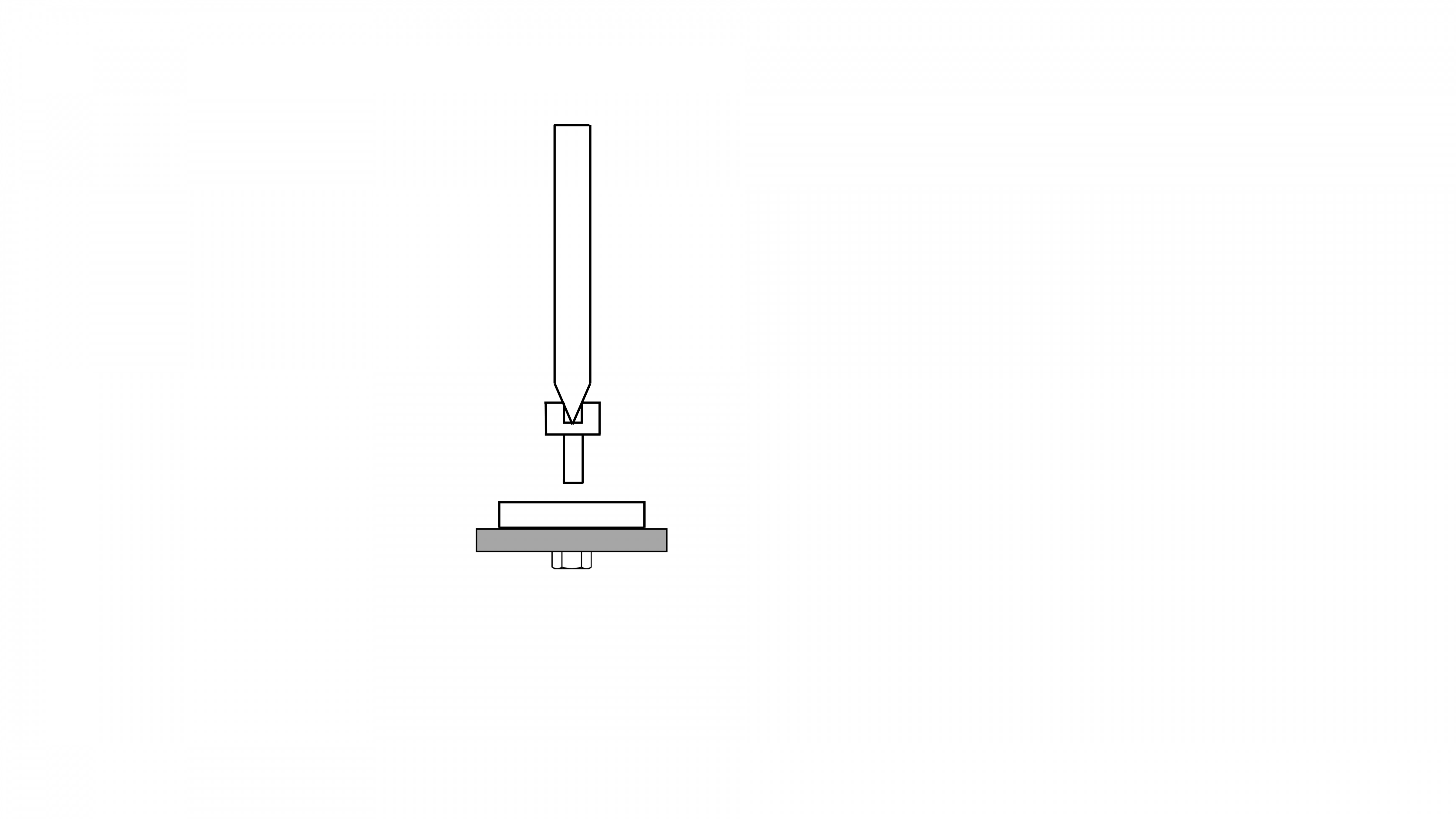
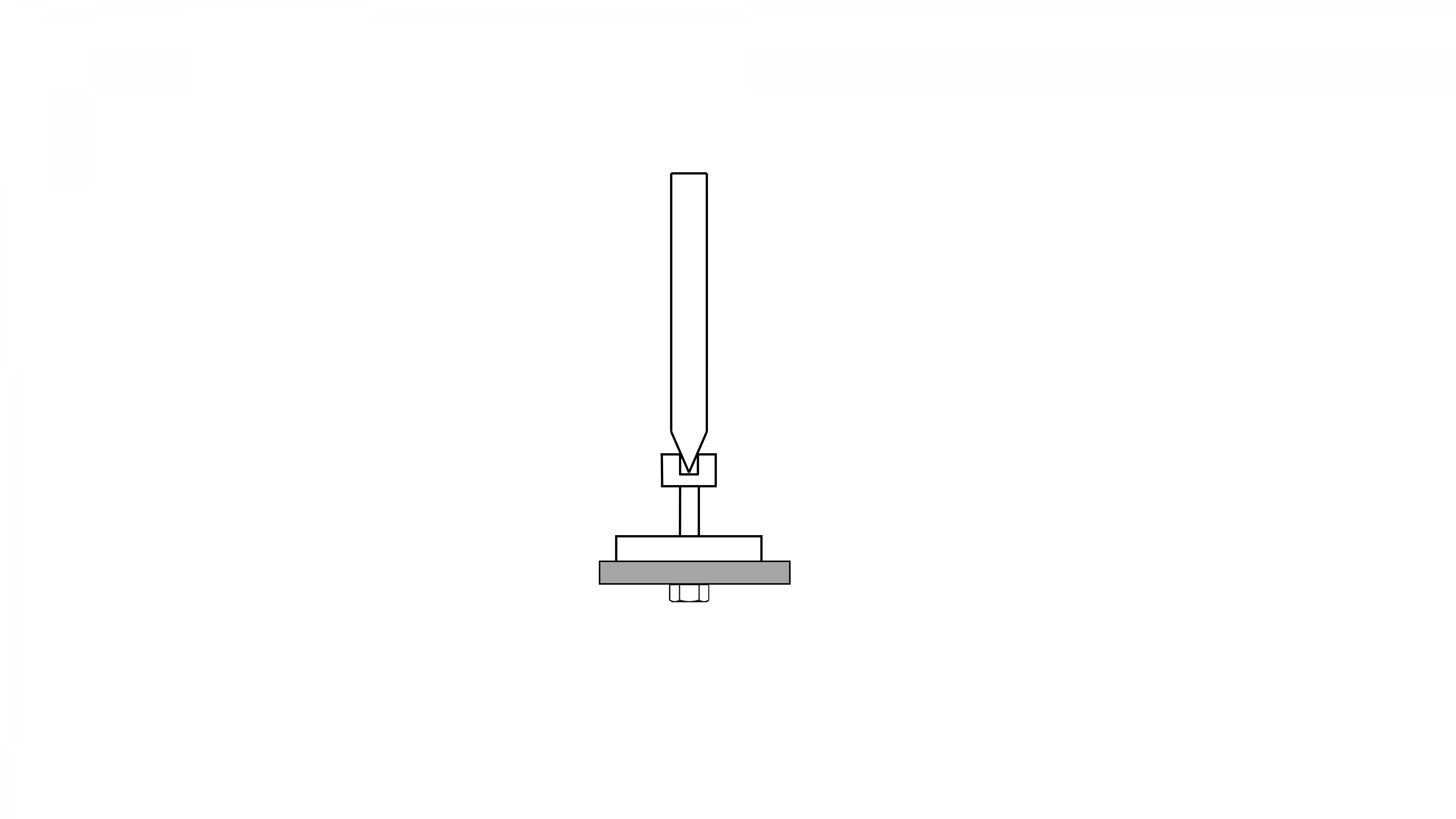
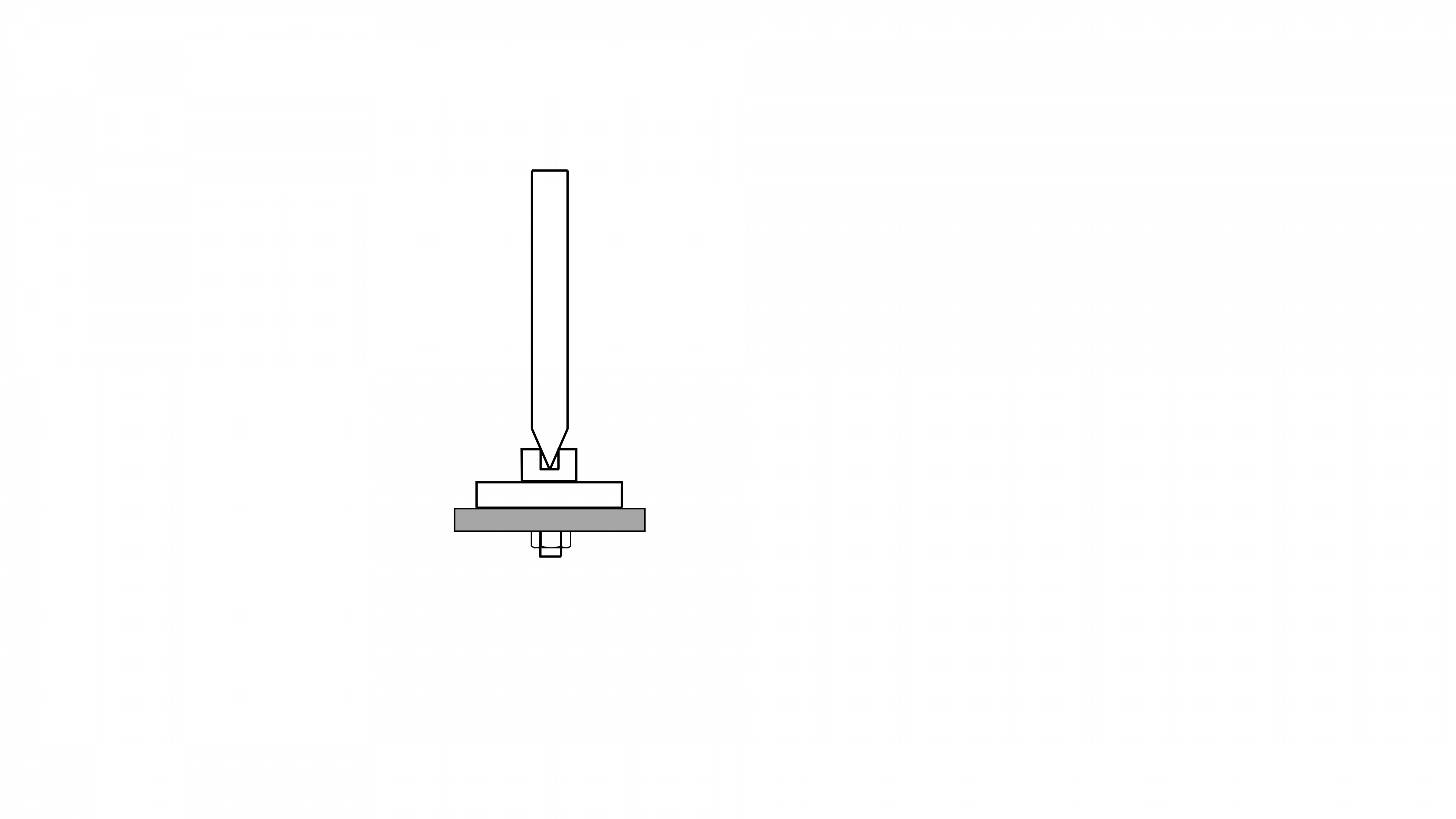
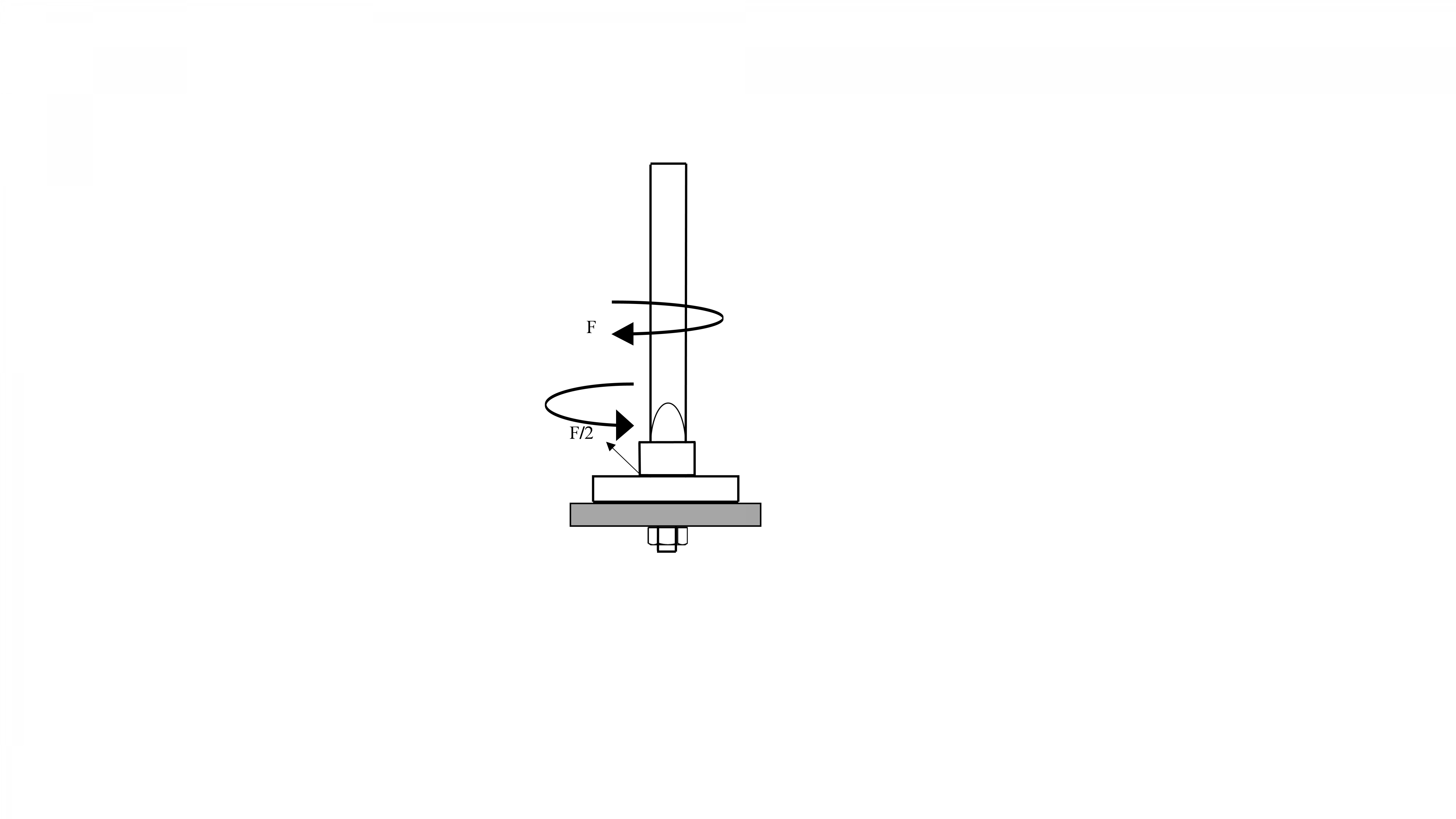
在螺栓紧固过程中电动工具高速急停,由于惯性,工具会产生极大的冲击力,其可能会损坏螺栓刀批头及工件,如图1.1所示。本文设计了一个基于SEA的电动螺栓紧固工具模型,并提出了一种控制方法,即利用动力工具末端与工件接触的状态,来控制动力工具输出力矩。由于工件装配不仅出现在工业中,居民生活中也随处可见,此控制方法可在一定程度上减轻操作者的负担。由于该控制方法是根据执行器末端与外部环境的状态来控制系统的输出力矩,故可以运用于很多工况。

图1.1 螺栓批头断裂及螺栓凹槽损坏展示图
工业革命以来,随着工业科学和技术的不断进步,社会的生产力也获得了巨大的发展和提升,对于生产自动化的技术要求也随之进一步提升。随着现代高科技电子产品的引入和发展,电子产品的实际产出量越来越大,人类对于电子产品的产出和使用效率也越来越高,而工业装配机器人也是工业电子产品设计和制造的过程中必不可少的重要一环。目前,工业电子产品装配中还可能会因为大量的装配设备出现问题,而直接导致一些电子产品不完全合格甚至是损坏一些贵重的仪器。而工业电子产品的不合格的重要原因是仪器设备的严重损坏,这将直接意味着工业生产成本的进一步增加。理解螺栓紧固的过程和深入研究基于SEA的阻抗控制系统的原理,在宏观和微观上都具有巨大的作用。在宏观上可以帮助进一步提高工业电子产品装配的效率,降低工业生产的成本;在微观上可以促进其他相关工业技术领域的进一步发展,比如工业装配机器人,切割电子产品等。
电动工具的螺栓紧固过程是靠统一控制的方式来实现:控制器根据反馈信号来控制电动工具的输出力矩。由于机械装置同轴度存在误差、串联弹性元件性能有限、传感器噪声干扰,控制算法被不断扩充以实现不同的功能。算法越复杂,则计算耗时越长,导致系统响应变慢,稳定性也难以得到保证。由于电动工具动力源及串联弹性元件的本质属性原因,电动工具如果输出大力矩,则控制系统难以保持稳定。
在现有的电动工具的控制算法中,一般是将工件所受到的力矩作为控制系统的扰动,大部分控制算法是去补偿这个扰动,如果是在工况环境比较单一、稳定的状态下,补偿扰动是一种比较好处理方式。但如果工况环境比较复杂,扰动一直在变化,此时补偿值就不确定。该电动工具在高速过程中由于惯性会产生比较大的冲击力,这会使电动具的输出力矩超调,也就会导致螺栓刀批头及装配产品损坏,故采用阻抗控制,将工件状态的变化作为系统的输入。
国内外研究现状
1.2.1紧固工具发展及研究现状
随着时代的发展,螺栓紧固工具发生了很大的变化。经历了传统的紧固工具,比如起子、扳手和其他手动拧紧工具,手动拧紧螺栓是通过手臂操作螺栓紧固工具拧紧螺栓,利用螺栓对手臂的反作用力判断螺栓连接是否紧固,具有一定的主观性,会导致精确度不高。虽然传统的紧固工具操作方便、价格低廉,但是效率极低,且不适用于大型机器跟高强度作业。人的臂力有限,对于一些需要巨大力矩的工件,人工用传统工具紧固往往达不到要求,传统紧固工具如图1.2。


图1.2 传统紧固工具
随着机械化程度的提高,后来出现了气动螺栓紧固工具,它的原理是利用气缸作为动力源,带动气动螺栓枪末端高速转动,但其缺点是输出力矩无法控制,容易导致工件损坏,且制造复杂。随着电力及相关理论的发展,人们利用电生磁原理制造出电动紧固工具,电动紧固工具中的线圈通电后产生磁场,该磁场使得转子高速旋转输出力矩,虽然能够输出固定力矩,但通电后力矩不可控制且无法反馈是否达到预期紧固效果,对于较大的工件而言,力矩有限,可能无法实现紧固的效果,对于需要力矩较小的工件,可能力矩过大损坏工件,气动紧固工具外形如图1.3右图


图1.3 现代紧固工具
气动螺栓紧固工具和电动螺栓紧固工具都有优缺点,但在自动化学科发展较快的背景下,研究电动螺栓紧固工具具有很好的发展前景和市场,国内外对此都很重视,动紧固工具外形如图1.3左图。国内,从电动螺栓紧固工具拧紧力矩的设定、螺栓拧紧力矩检测入手,探讨电动螺栓紧固工具拧紧力矩控制方法[1]。针对电动螺栓紧固工具在国内的研究停滞不前,在市场上跟国外产品相比,缺乏竞争能力,上海电动工具研究所开发了新型高精度全自动定扭矩电动螺栓紧固工具[2]。文献[3]详细介绍了电动螺栓拧紧工具的分类及电动螺栓紧固工具的基本工作原理,并通过设计制作了电动螺栓紧固工具的校准解决装置,依据现场不同的工况分别制定了一套有针对性的紧固工具校准解决方案,实现快速、高效和准确的现场紧固工具校准[3]。文献[4]详细讲述了目前电动螺栓紧固工具的主要动力源问题,分析不同的电机工件使用材料,不同的动力优缺点[4]。文献[5]同时还设计了一种新型多刀头电动螺丝刀,采用多刀头设置和wifi自动控制,将不同的刀头通过卡槽直接卡在了刀身,实现快速的安装和替换,提高了工件快速安装的效率同时也避免了刀头的丢失[5]。文献[6]针对目前工人操作使用电动螺丝刀的效率太低的情况,设计一款实现螺丝自动快速传送的机构[6]。文献[7]同时还设计了一款全自动定扭矩电动螺丝刀,满足了小精度规格螺钉、高精度扭矩、大精度范围场合使用的特殊要求[7]。
国外,文献[8]采用了陀螺仪永磁感应控制技术的电动机,实现对调向和调速的控制,使无刷直流电动机和齿轮驱动的电动螺丝刀的智能性和操作舒适度都得到了提升。螺栓紧固是目前在工业机械组装中目前使用最广泛的螺栓紧固组装方法之一[8]。文献[9]主要讲述了在对螺栓内部进行紧固的过程中,对组装工作精度的统计实验研究,在相关文献中已经对其进行了一系列的统计实验设计和数据分析,以进一步研究在受控制条件的环境中,电动机在使用多维传感器和高分辨率光学位置传感器监视系统时,进行的螺栓拧紧过程对装配工作精度的直接影响[9]。
1.2.2阻抗控制研究现状
国内,阻抗控制中, 在阻抗精度和抵抗建模误差的鲁棒性之间存在困境[10]。为了有效解决这个巨大的难题,基于内部的模型控制结构和时延估计,开发了一种高精确且鲁棒性好的控制技术:前者可以注入所需的精度和阻抗并有效地纠正阻抗建模精度和误差,后者时延估计并有效地补偿了适用于机械手的非线性流体动力学。
请支付后下载全文,论文总字数:19986字
相关图片展示: