人工智能在无人驾驶汽车中应用的研究毕业论文
2020-02-19 19:33:38
摘 要
人工智能属于计算机科学的一个子部分,在互联网迅速发展的这个时代,人工智能也得到了充分发展。越来越多的人们在这一领域开展研究,许多应用场景被开发出来,有些甚至已经用于实际生活了,常见的有机器翻译,图片识别。在无人驾驶汽车领域中,各国对人工智能的技术研究越来越深入,一致认为人工智能是推进无人驾驶汽车发展的重要推动力。人工智能应用于无人驾驶领域,毫无疑问能解决很多的技术难题。人们常讨论的人工智能产业落地,很有希望最早在无人驾驶领域展开。而这些技术能产业化并应用于社会生活,毫无疑问会给汽车带来革命性的变化。
本文第一章分析时代背景和科技发展现状,对国内外人工智能在无人驾驶汽车中应用的研究现状进行阐述。第二章则是介绍相关理论基础,包括人工智能的深度学习算法和卷积神经网络,以及无人驾驶理论基础。第三章介绍图像识别领域的研究,关于人工智能应用于汽车视觉系统的案例。这里涉及到的人工智能技术有深度卷积神经网络。第四章更进一步对人工智能领域的深度学习技术Faster R-CNN应用于行人检测,首先研究了模型的框架,其次分析了检测性能,并与传统行人检测方法进行对比。第五章对论文进行总结,并对人工智能在无人驾驶应用的发展研究做出展望。
关键词:人工智能;无人驾驶;深度学习算法;行人检测
Abstract
Artificial intelligence is a sub-component of computer science. In this era of rapid Internet development, artificial intelligence has also been fully developed. More and more people are conducting research in this field, many application scenarios have been developed, and some have even been used in real life, common machine translation, and image recognition. In the field of driverless cars, countries have increasingly in-depth research on artificial intelligence technology, and they agree that artificial intelligence is an important driving force for the development of driverless cars. The extensive application and development of artificial intelligence technology in driverless cars makes auto-driving technology very likely to become one of the earliest industries in artificial intelligence, which will subvert the entire automotive and related industries.
The first chapter of this paper analyzes the background of the times and the current development of science and technology, and expounds the current research status of the application of artificial intelligence in driverless cars at home and abroad. The second chapter introduces the theoretical basis, including the deep learning algorithm and convolution neural network of artificial intelligence, as well as the theory of unmanned driving. The third chapter describes the image recognition research of Mobileye and NVIDIA. They use the method based on deep convolution neural network in the visual system of the car and have achieved very ideal results. In the fourth chapter, in-depth learning technology of artificial intelligence is applied to pedestrian detection. Firstly, the framework of the model is studied. Secondly, the detection performance is analyzed and compared with traditional pedestrian detection methods. The fifth chapter summarizes the thesis and makes a prospect for the development of artificial intelligence in unmanned application.
Keywords:Artificial intelligence;Driverless; deep learning algorithm; pedestrian detective
目 录
摘要 I
Abstract II
第1章 绪论 1
1.1 课题研究的背景及意义 1
1.2 研究的主要内容 2
1.3 人工智能在无人驾驶领域的应用现状 2
第2章 人工智能和无人驾驶相关理论 4
2.1 人工智能基础理论 4
2.2 无人驾驶基础理论 6
2.3 国内外无人驾驶汽车研究现状 12
2.4 本章小结 15
第3章 深度学习在无人驾驶图像处理领域的研究 16
3.1 无人驾驶图像处理 16
3.2 无人驾驶硬件实现 17
3.3 无人驾驶算法实现 18
3.4 本章小结 21
第4章 总结与展望 22
4.1 论文总结 22
4.2 未来研究展望 22
致谢 23
参考文献 25
第1章 绪论
1.1 课题研究的背景及意义
深度学习近年来发展十分迅猛,越来越多的研究表明人工智能会给人们的生活带来巨大的改变,人工智能的应用会是又一次的产业革命。各国政府也开始大力推动人工智能的产业发展,相继出台一系列政策专门用于支持本国人工智能的研究和相关企业的技术应用。
人工智能说的更专业一些就是机器智能,这一术语最早是在20世纪50年代Dartmouth学术探讨会上提出来的[1]。这门全新的科学,可以模拟人类的思维活动并将其延伸拓展。人工智能与计算机科学密不可分,计算机科学的迅速发展是人工智能成长的基础。此领域目前的研究方向包含智能机器人、文字识别、图像识别处理、专家系统等。
无人驾驶技术的研究最早在美国和欧洲国家开展,在这些国家研究者从驾驶可行性及投放社会使用的可能性方面展开探索,并取得了一些成功。中国在无人驾驶领域的研究开始于上世纪八十年代。相较于发达国家我国起步较晚,在这一领域需要投入更多来追赶发达国家的脚步。最早开展研究的国防科技大学在这一领域先产出了成果,被命名为红旗HQ3的无人车产生了[2]。这一无人车可以由车载计算机做出规划控制,且能在拥挤路段行驶,独立完成汇入车流的任务。在一项公开路段的测试中,HQ3无人车面对复杂的道路情况,独立规划轨迹并行驶300余公里,十分顺利把这项极具挑战性的任务完成了。另外近期越来越多的互联网公司开始在自动驾驶领域布局。腾讯设立新机构开展无人驾驶技术的研究,并利用到自身前期的技术积累,如高效的云计算能力和地图领域的雄厚实力。百度公司的阿波罗计划也一直如火如荼的开展着,意欲搭建一个开源的无人驾驶平台。百度也成功得到了在加州路试的许可证。资本的注入无疑会加速这一领域技术的产出,而且我国也在积极出台有利于无人驾驶产业发展的政策。政策扶持加上资金注入快速的推动着无人驾驶向前。人工智能向来是互联网公司的专长,他们在无人驾驶产业布局,也同样意味着人工智能在无人驾驶领域应用场景会被更多的研究。
我们都能明白人工智能的发展同样对无人驾驶领域的相关技术产生了影响。人工智能应用于无人驾驶领域越来越频繁。到2015年为止,与无人驾驶技术有联系的发明专利已达两万多项。将人工智能技术引进到无人驾驶汽车的应用研究中,已成为各国政府越来越重视的研究课题。
未来人工智能将在更多领域发挥更大的科学技术推动作用,在汽车领域,有着很大的应用空间,将人工智能技术引进到无人驾驶汽车的应用研究中,已成为各国政府越来越重视的研究课题。人工智能在这一领域的应用在很多场景,比如感知环境、决策规划、反馈控制这些模块都有人工智能的应用。
环境感知模块:此模块任务是利用传感器收集数据,并指导无人车的规划决策。常见的传感器有摄像头,雷达等。
行为决策模块:这一模块的任务是要得出指导无人车运行的指令,而这些指令是中央电脑根据传感器收集的数据,实时路网信息、定位信息等作为输入,然后运算的出的。
运动控制模块:这个模块将决策规划的指令转换为控制车辆的命令。如油门刹车开度,方向盘转角这些操作命令。
本文着眼于人工智能应用于无人驾驶的环境感知模块,首先是在传感器的基础上对图像识别技术进行研究,人工智能技术在汽车视觉系统中的应用。这里运用到的技术主要指深度卷积神经网络。两者的结合带来了不错的应用效果。
之后对人工智能领域的应用于行人检测的技术进行研究,探究这种深度学习技术的模型框架,对其检测性能也做出分析,对比于传统检测方法的优缺点都被明晰。
汽车诞生以来就深刻改变着人们的出行生活,提升了人们的活动范围,改善了生活质量。当然汽车也会对人类产生困扰。汽车的出现也带来很多问题,道路越来越拥挤,各类安全事故更是触目惊心。据我国统计报告,仅在2013年中我国因汽车导致的威胁人民生命安全的事件就达到十万件以上,其中四万余人因汽车事故而丧命,所造成的经济损失更是无法估量[4]。而针对汽车安全的统计文件均表明,绝大多数安全事均与驾驶员违规驾驶有关,例如酒驾,疲劳驾驶等,对人民的生命财产安全造成了极大的危害。
无人驾驶技术不断在发展着,当有一天它能走出实验室并应用于现实生活中这些问题也就能得到良好的解决了。本文讨论的人工智能于无人驾驶领域的应用是一个广泛的命题,将其系统化,从而对相关技术发展有一个清晰的认知和深入的学习,并对发展中面临的问题提出展望,具有一定的理论和实际意义。
1.2 研究的主要内容
首先阐述了理论知识,包括人工智能部分和无人驾驶部分;再对国内外这一领域的研究现状进行简单的介绍,这样更快的了解背景。
其次,对人工智能在无人驾驶汽车环境感知领域、决策规划领域、控制执行领域中的应用进行分析说明。把深度学习的应用原理详细阐述。
最后,发现人工智能在无人驾驶汽车中应用的研究发展中存在的问题和面临的挑战,并提出相应建议,为以上问题的解决提供些许帮助。
1.3 人工智能在无人驾驶领域的应用现状
人工智能的应用得到了很好的发展,在很多场景都有应用。典型的有模式识别、机器翻译、逻辑推理、定理证明、计算计视觉等方面。人工智能技术在发达国家依旧飞速发展。当前阶段的人工智能机器,能承担复杂脑力工作,甚至可以在记忆和逻辑运算这些方面辅助人类。有专家认为随着更新迭代,机器甚至能超越人类。
无人车完成环境感知任务主要依赖各种传感器,它们是“眼睛”,收集各类环境数据信息。现在应用于无人驾驶领域的传感器主要有以下4类。
(1)雷达传感器:雷达传感器的任务常常是探测环境中的障碍物,避免碰撞的发生。根据发射的波不同能够被分类,发出的波主要有激光,毫米波,超声波。激光雷达在现阶段的试验中十分常见,它的优点是精准度较好且探测到达的区域广泛,缺点是在雾霾天气状况下被影响严重,另外成本较高导致不能在市场中大量应用;毫米波雷达相较于激光雷达成本低一些,探测距离小一些,还有一个缺点是可视角度也较小,折衷的特性让毫米波应用也很广泛;超声波雷达是成本最低的,我们常见的倒车雷达便是超声波雷达,它比较适合用于预警发生在低速状况下的碰撞。
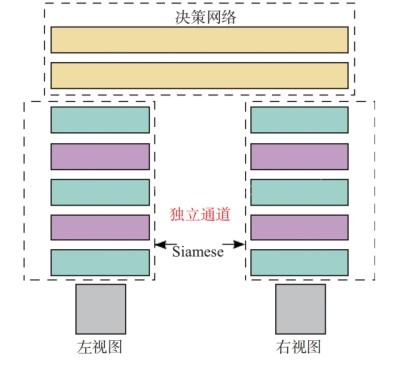
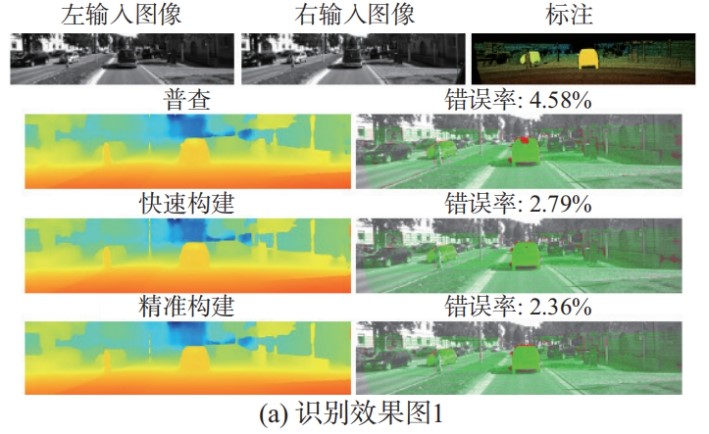
(2)视觉传感器:视觉传感器通俗说来就是摄像头,所以它的应用场景需要光线条件较好,在恶劣天气下基本丧失功能。这一传感器常用在识别车道线、交通信号灯等。人工智能技术在图像识别领域的应用是十分广泛的,所以摄像头作为纽带连接人工智能和无人驾驶,意义十分不一般。
(3)定位及位姿传感器:无人车开展无人驾驶需要获得的第一个数据就是定位了。这一传感器可以完成高精度的定位。实现定位的原理主要包括GPS和差分定位。目前大量差分定位基站也被布置,这些都是无人驾驶走进现实生活的有力保障。
(4)车身传感器:车身传感器在传统的汽车上也被大量的布置,如车速传感器,转速传感器等一系列。传统汽车完全由人类操作,而无人车在行驶时要依靠车载电脑运算得到指令。无人驾驶汽车的车载电脑不同于我们现实生活中的电脑,车载电脑的工作条件更加恶劣,可能由要承受高温高振的苛刻条件。无人车的车载电脑采用的是都是工控机,工控机装载智能系统而且预装了各类软件和数据。智能系统不仅能认知外界感知外界,还要有学习能力。
深度学习这时就能够大放异彩了,深度学习技术在无人车中是一项关键点,无人车中用到的深度学习来源是人工神经网络。深度学习有能力把车辆识别能力一定程度提高,同时正确率也能得到保证。无人车深度学习系统能把收集到的大量数据进行转变,获得有效的信息。如雷达获得的数据可以经过处理表示为车辆与物体间的距离;激光雷达收集到点云数据也能被这样处理;将车载传感器所收集到的图形数据转变为对路障的判断。
第2章 人工智能和无人驾驶相关理论
2.1 人工智能基础理论
人工智能是计算机学科的一个分支,也是人类社会发展到20世纪70年代出现的顶尖技术之一,与空间技术和能源技术并列称为影响人类社会发展进程三大技术,同时也同基因工程和纳米科学并称为二十一世纪人类社会三大尖端技术。在近三十年期间,人工智能技术快速发展,在众多领域中广泛应用并且发挥了巨大的作用,得到较高的认可度。
人工智能是通过仿真人类的思维方式及过程在计算机中进行数据计算以及学习、分析、记忆等原本是人类才具有的各种智能行为的学科。现有人工智能学科内容主要包括人工智能原理和设计并制造具有人脑某些功能的计算机两个比较大的分支。人工智能学科将自然科学与社会科学相结合,二者领域众多理论融合为一体,其本质已经不属于计算机科学。我们可以用实践和理论的辩证关系来阐释人工智能和思维科学两者的关系。从思维观点看,人工智能不仅具有一定的逻辑性,而且还表现出一定的形象性,同时也像人类的思维活动一样,可能产生灵感思维。这些特点是人工智能学科内容不断充实的主要动力。数学常被认为是自然科学体系中的基础性学科,其在语言领域、思维领域具有广泛用途。
2.1.1 深度学习
深度学习其定义为含多隐层的多层感知器的深度学习结构。深度学习通过一定方式将低层的特征多次结合,使其整合得到更具代表性的事物属性类型或特征,其可以用数据的不同分布方式表示出来[5]。
2006年,Hinton等人基于深度置信网(DBN)提出非监督逐层训练算法,由此生成了深度学习概念。它针对深层结构进行优化过程中出现的问题得以解决提供了帮助。随着研究的进一步深入,关于多层自动编码器的深层结构问题研究也得到了很大的进展[6]。而具有真正意义的多层结构学习算法,应该是Lecun等人在前人基础上提出的卷积神经网络。这一算法为了达到最佳训练性能,通过在空间相对关系中降低所求参数的数量。
深度学习其实是通过对数据进行表征学习。观测值的表示方法比较多,例如采用不同像素强度值的向量来表示,也可以将其抽象的表示为多个边构成或者具有特定形状的区域等等。使用某些比较适合人类学习的表示方式,能够让学习者更好的完成学习任务,比如人脸识别。深度学习进行表征学习的方式有两种,分别为非监督式和半监督式[7]。
深度学习已经得到广泛人民群众及政府的关注,并成为一个新兴的领域。通过深度学习,建立仿照人类分析学习的多层次神经网络,使机器能够参照人类大脑的运行和处理机制,从而对数据做出更加合理的解释,这一学习方式可以应用在针对图像、声音或者文本等各种对象上的学习中。
2.1.2 卷积神经网络
卷积神经网络是一类包含卷积计算且具有深度结构的前馈神经网络,是深度学习的代表算法之一。卷积神经网络可以在分类不发生改变的情况下进行平移(shift-invariant classification),因此也被称为“平移不变人工神经网络(Shift-Invariant Artificial Neural Networks, SIANN)”[8]。
人类早在上世纪八、九十年代就已经开始针对卷积神经网络展开了研究。在相关研究中,时间延迟网络和LeNet-5两大理论被最早提出;人类社会发展到二十一世纪之后,深度学习等重要理论相继形成,而且数值计算设备也不断改进,卷积神经网络理论也迅速发展,逐渐趋于完善[9]。该理论也因此在计算机视觉、语言处理等众多领域得以应用。
卷积神经网络仿造生物的视知觉(visual perception)机制构建,能够在监督学习和非监督学习两种条件下应用,其隐含层内的卷积核参数共享,以及具有洗属性的层间连接,促使卷积神经网络可以用较小的计算量对格点化(grid-like topology)特征,例如针对音频或者进行学习、有稳定的效果且对数据没有额外的特征工程(feature engineering)要求。
日本学者福岛邦彦(Kunihiko Fukushima)曾经提出了neocognition模型。这一模型被认为是人们对卷积神经网络进行研究的发端[10]。在其1979和1980年发表的论文中,福岛仿造生物的视觉皮层(visual cortex)设计了以“neocognition”命名的神经网络。neocognition是一个具有深度结构的神经网络,并且是最早形成的一种深度学习算法。这种算法的隐含层包括S层(Simple-layer)和C层(Complex-layer)两个部分,且两部分交替连接在一起。S层单元的主要功能是在感受野(receptive field)内对提取图像特征,C层单元的主要功能是对S层单元接收到的不同感受野反馈回来的具有一致性的特征,同时对其作出响应。neocognition的S层-C层组合能够进行特征提取和筛选,部分实现了卷积神经网络中卷积层(convolution layer)和池化层(pooling layer)的功能,被认为是启发了卷积神经网络的开创性研究。
第一个卷积神经网络是1987年由Alexander Waibel等提出的时间延迟网络(Time Delay Neural Network, TDNN)[11]。TDNN是卷积神经网络的一种,其特点是利用语言进行问题识别。同时使用FFT预处理的语音信号作为输入内容。其隐含层由2个具有一维特征的卷积核构成,最终服务于频率域上的平移不变特征的提取任务。由于在TDNN出现之前,人工智能领域在反向传播算法(Back-Propagation, BP)的研究中获得了飞跃式的发展,因此TDNN得以使用BP框架内进行学习。在原作者的比较试验中,TDNN的表现超过了同等条件下的隐马尔可夫模型(Hidden Markov Model, HMM),而后者是二十世纪80年代语音识别的主流算法。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: