连杆体连杆盖装配机器人结构设计毕业论文
2020-02-17 19:43:02
摘 要
随着科技的飞速发展,制造业的自动化水平也越来越高,工业机器人的应用也越加广泛。通过使用工业机器人来代替工人完成简单的搬运、焊接、喷涂等工作,可以降低生产成本,提高生产效率,同时可以更好将工人的精力分配到更加重要的地方。本文针对汽车企业连杆加工中装配工序大部分仍然由工人完成的现状,对一种能够代替工人完成装配工作和对工件的基本检测工作的装配机器人进行结构设计。
本文借助三维设计建模软件SolidWorks完成对连杆体连杆盖装配机器人的总体结构设计和多功能机械手动力传动与结构设计。本文总共分为六部分,第一章描述设计背景,第二章确定总体设计方案;第三章进行结构设计;第四章进行驱动设计,第五章对相应辅助装置进行简单设计,第六章进行总结。
通过设计基本实现了对连杆体连杆盖装配机器人的结构设计、驱动设计以及三维模型搭建。
关键词:装配机器人;结构设计;驱动设计
abstract
With the rapid development of science and technology, the level of automation in the manufacturing industry is getting higher and higher, and the application of industrial robots is becoming more and more extensive. By using industrial robots to replace workers to complete simple handling, welding, spraying and other work, the production cost can be reduced, the production efficiency can be improved, and at the same time, the energy of workers can be better distributed to more important places. In view of the fact that most of the assembly processes in the connecting rod processing of automobile enterprises are still completed by workers, this paper designs the structure of an assembly robot which can replace workers to complete the assembly work and the basic inspection of workpieces.
In this paper, the three-dimensional design modeling software SolidWorks is used to complete the overall structural design of the connecting rod body connecting rod cap assembly robot and the power transmission and structural design of the multifunctional manipulator. This paper is divided into six parts. The first chapter describes the design background and the second chapter determines the overall design scheme. The third chapter carries on the structural design; The fourth chapter carries on the drive design, the fifth chapter carries on the simple design to the corresponding auxiliary device, the sixth chapter carries on the summary.
Through the design, the structural design, driving design and three-dimensional model building of the connecting rod body connecting rod cap assembly robot are basically realized.
Key words: Assembly robot; Structural design; Drive design
目录
第1章 绪论 1
1.1背景 1
1.2研究目的和意义 1
1.3 SolidWorks的应用 2
第2章 装配机器人总体设计方案 3
2.1连杆装配过程分析 3
2.3装配机器人总体设计方案制定 3
2.3.1机器人设计类型的选择 3
2.3.2所需自由度分析 5
2.3.3机器人总体设计方案优选 5
第3章 机器人结构设计及三维建模 9
3.1手部的结构设计 9
3.1.1右手手部结构设计 9
3.1.2左手手部结构设计 13
3.2手腕的结构设计 14
3.2.1手腕的自由度 14
3.2.2手腕的结构设计 15
3.2.3手腕整体机构及三维建模 16
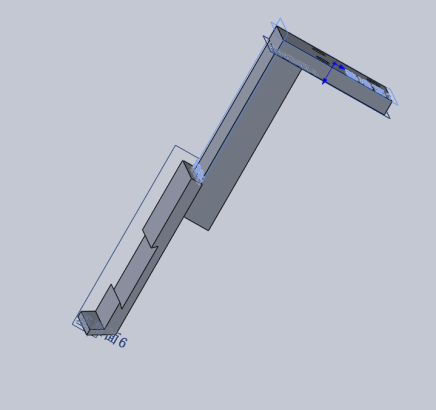
3.3大小臂的结构设计 16
3.3.1大小臂长度的确定 16
3.3.2大小臂的结构设计和三维建模 18
3.4机器人机身的结构设计 20
3.4.1机器人躯体的结构设计 20
3.5机器人基座的结构设计 23
3.6机器人总体三维模型效果图 24
3.7装配机器人零部件的校核 24
3.7.1齿轮的校核 24
3.7.2 轴的校核 26
第4章 装配机器人的电动驱动系统 27
4.1手部夹持装置电动驱动系统设计 27
4.2机械臂电动驱动系统设计 28
4.2.1腕关节电动驱动设计计算 29
4.2.2大小臂电动驱动设计计算 30
4.2.3机械臂基座电动驱动设计计算 32
4.3机器人基座电动驱动计算 33
第5章 机器人辅助装备设计 35
5.1传感器装备设计 35
5.1.1基于右手手部的多传感器系统设计 35
5.1.2 基于左手手部的传感器系统设计 36
5.1.3其他传感器 36
5.2装配机器人辅助工作台设计 36
第6章 结论与展望 38
参考文献 39
致谢 40
第1章 绪论
1.1背景
在现代工业产品的制造生产中,智能制造装备的应用越来越普及。智能制造装备是集感知分析、推理、决策、控制等功能于一身的新型制造装备,是先进制造技术、信息技术和智能技术的集成和深度融合,是制造业未来长期的发展方向。智能制造装备的运用能够有效提高生产效率、生产速度及产品质量,降低生产成本,改善劳动关系,保证安全生产和通用化的生产模式。[智能工业机器人作为智能制造装备研究的一部分,正逐渐应用于各个工业生产领域,为现代化工业生产提供强大的动力。相较于国外,我国在工业机器人方面的研究开始的时间晚,与德国和日本等国存在比较大的差距。我国在2013年就已经成为了全世界最大的工业机器人消费市场,由于高端机器人市场长期被国外品牌垄断,我国国产的工业机器人则主要是中低端产品。近年来,随着我国国内机器人市场的不断扩大,我国的企业逐渐代替高校和科研院所成为了工业机器人技术创新的主力,从下游的系统集成切入,不断进行技术创新,取得了非常大的进步,前景广阔。
1.2研究目的和意义
本设计主要研究应用于对汽车连杆零部件进行装配的智能装配机器人。装配机器人是一种专门为替代人完成工件的装配工作而设计的机器人,主要应用在装配生产线上,取代手工作业的工序,具有精度高、柔顺性好、工作范围大、末端执行部件能够实现多种复杂工作等许多优点。装配机器人的应用前景非常广泛,在现代制造生产中,几乎所有产品都涉及了装配。装配机器人的装配对象品种规格非常多,装配任务往往较为复杂,并且装配机器人装配效率、速度、精度以及装配线的柔性等都会影响到所装配的产品在国际上的竞争力。可以说,装配机器人大都是依据产品装配需求而量身定做的,不同的产品,不同的尺寸,不同的装配方式所要求配置的装配机器人也是不同的。汽车产业作为我国制造业的代表性产业,在国内率先引进、研发和应用了工业机器人,并且现在基本已经实现生产线高度自动化,因此对于配备的工业机器人的要求也更加严格。
针对汽车连杆零件的装配,要求所设计的装配机器人的装配动作有较高的精度,能够对不合格的装配工件进行检测并作出相应的反馈。通过对装配机器人结构的研究和设计,能够在接触学习到很多机械制造及自动化方面新知识的同时将大学四年所学知识进行应用,对自身是一个挑战,是很有意义的。
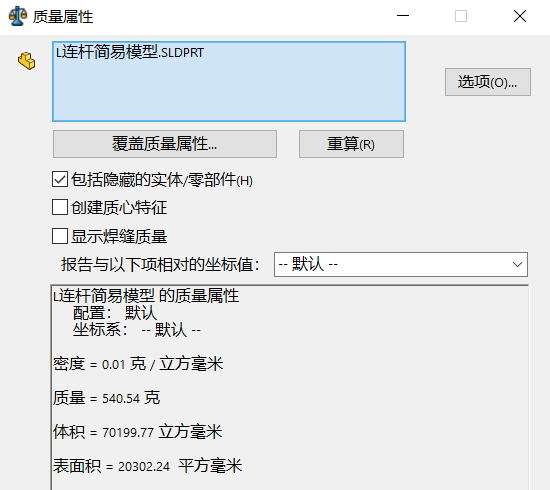
1.3 SolidWorks的应用
SolidWorks软件作为世界上第一个基于Windows开发的三维CAD系统,功能强大组件丰富,具有功能强大、易学易用和技术创新三大特点。相比于其他三维建模软件,SolidWorks的用户界面简单明了,绘图也相对方便快捷,并且能够构建大部分机械产品特征,还带有应力分析等功能,完全能够满足本次设计的要求。因此在这次毕业设计中则选用SolidWorks作为设计平台对装配机器人进行三维建模设计。
第2章 装配机器人总体设计方案
2.1连杆装配过程分析
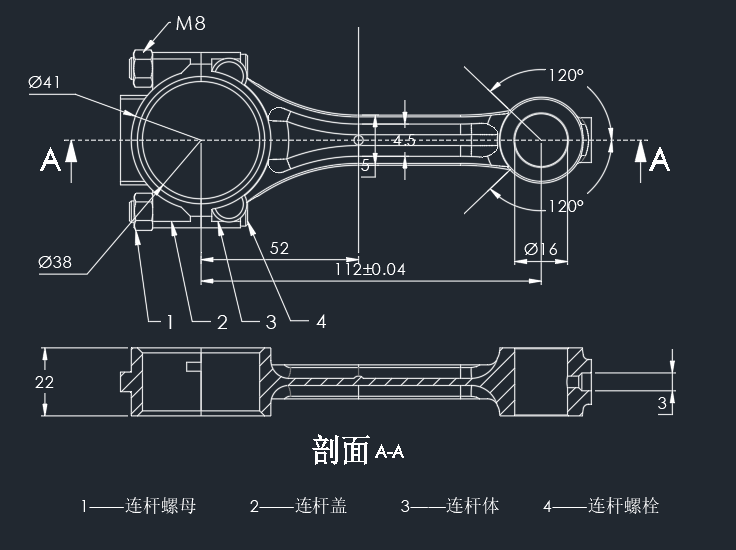
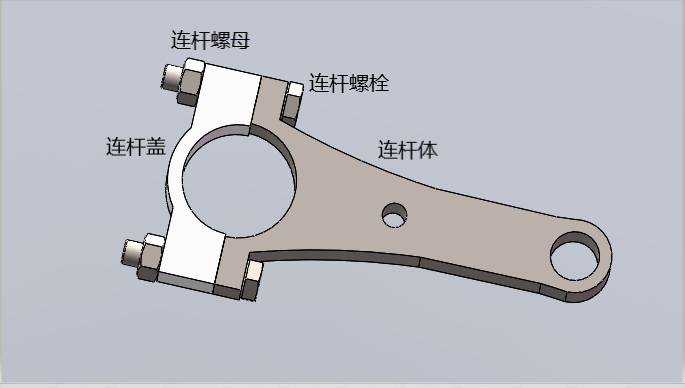
连杆是汽车发动机的重要部件之一,主要的作用是将活塞所受的力传递给曲轴,进而将活塞的往复直线运动转化为曲轴的回转运动,从而来实现功率的输出。需要装配的连杆主要由连杆体、连杆盖以及螺栓螺母四个零部件装配而成,其中连杆体和连杆盖往往是配对的,因此要求装配机器人能够识别零部件是否匹配,确认完毕后对连杆进行装配。
工人装配连杆体步骤一般为:取连杆体,检查是否有明显的裂纹,取螺栓,将螺栓装入连杆体内,再装入连杆盖,最后拧紧螺母。跟人工装配作比较,机器人装配是机械的,不灵活的,无法像工人一样仅凭双手快速进行装配,对于调整零件装配姿态及方式也有很大的局限性,因此需要一些辅助设备,如辅助工作台,来帮助机器人共同完成连杆的装配。通过利用辅助工作台来实现对连杆零部件的定位夹紧以及翻转。通过增加辅助工作台不但能够避免拧紧螺母时产生的振动和力矩对机器人的影响,最大化地减小机器人工作负载,还能降低对机器人自由度地要求,使机器人结构设计更加简单化。
图2.1 装配机器人装配过程
2.3装配机器人总体设计方案制定
2.3.1机器人设计类型的选择
常用于工业的机器人根据其主连杆的运动特点可以分为直角坐标型、圆柱坐标型、球坐标型和关节型机器人,见图。跟其他三类机器人相比较,关节型机器人结构更加复杂,相应的也更加灵活,这使得关节型机器人在加工领域应用更加广泛,更能满足复杂的加工工序。因此,装配机器人类型的设计则主要参照关节型机器人来进行。
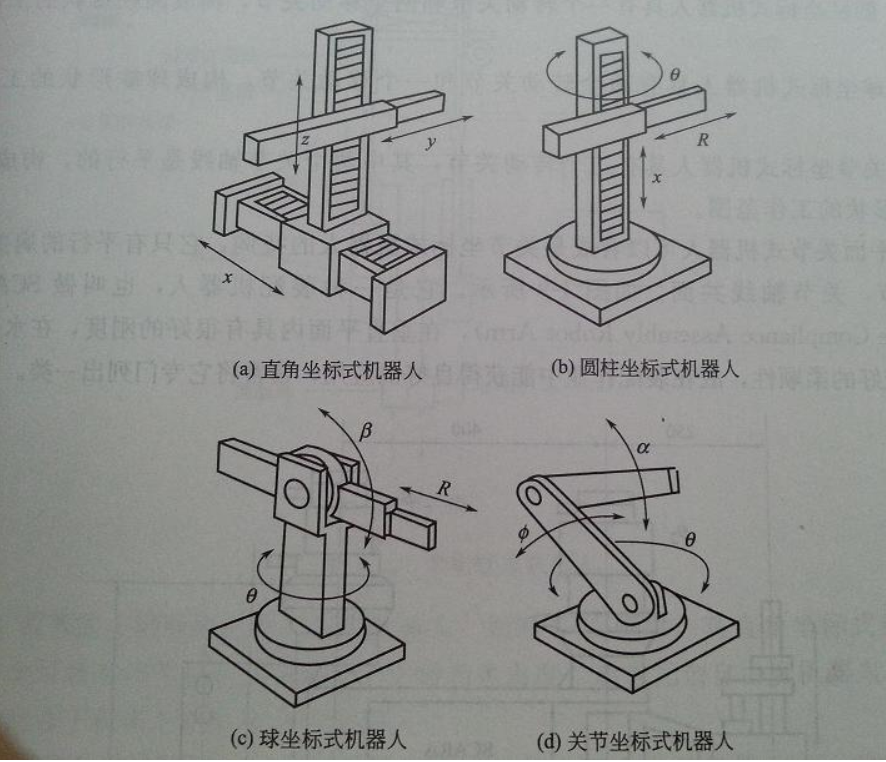
图2.2 机器人的分类
关节机器人由多个旋转和摆动机构组合而成,其摆动方向主要由沿铅垂方向和沿水平方向两种,因此这类机器人又可分为垂直关节机器人和水平关节机器人。[1]根据装配动作,分别对两种类型机器人进行优选。
整个动作过程可以分为工件的夹取和放置,工件的装配,拧紧螺母三个动作。
水平多关节机器人通过升降机身机构和平面内的摆动来实现对工件的夹取,工件的夹取也只限于水平和垂直的移动,即位置的改变,无法通过机器人来完成工件姿态的变化,所以在夹取放置以及装配上都是相对不适合的。但是,由于平面关节机器人在垂直方向上的刚度较大,而拧紧螺母动作主要是在垂直方向上进行,所以水平关节机器人非常适合拧紧螺母。
相较于水平多关节机器人,垂直关节机器人有着更加复杂的结构。根据其自由度增加能够实现更加复杂的动作。现有的涉及到焊接,装配,以及其他涉及复杂的加工工作的工业机器人大都是垂直关节型机器人,它能够通过各关节不同角度的旋转来实现对工件不同角度的抓取和装配,能够完成更多的动作。
通过分析,最终选择参考垂直关节机器人进行装配机器人结构设计。
2.3.2所需自由度分析
通过对工件装配过程地分析,可以得出:
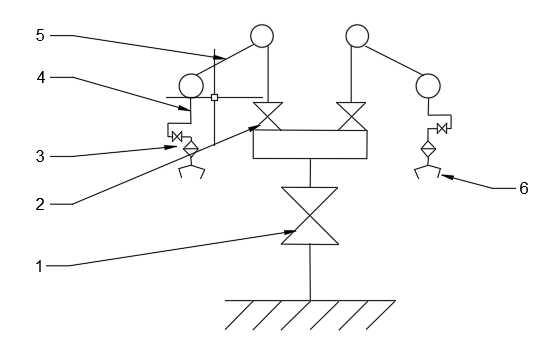
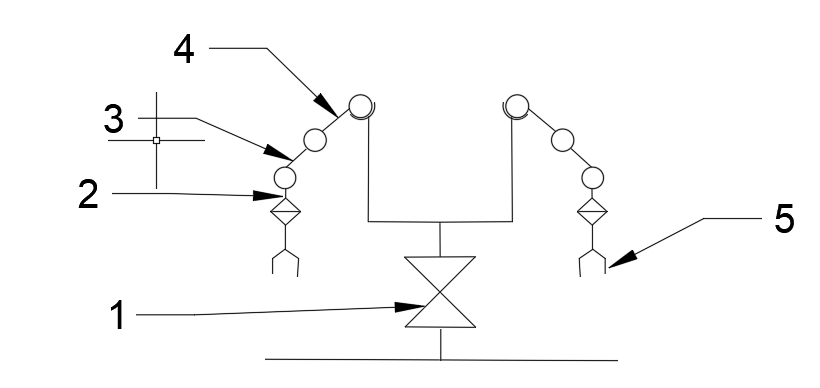
在抓取与放置工件过程中要求机器人能要求机器人手部在水平方向和垂直方向有一定距离地位移,手腕部分要能够摆动和旋转,从而调整手部的夹取姿势和放置姿势。通过分析,可以得出,如图所示,基座旋转需要一个自由度,大臂与基座连接关节处需要一个自由度,大臂与小臂的连接关节需要一个自由度,手腕部分需要两个自由度,即在辅助工作台位置最佳的条件下,最少需要五个自由度能够完成整个抓取与放置动作。
同样进行分析,可以得出如简图所示,由于拧紧动作是在竖直方向上进行的,因此机械臂进行螺母的拧紧时只需要四个自由度即可完成拧紧动作。
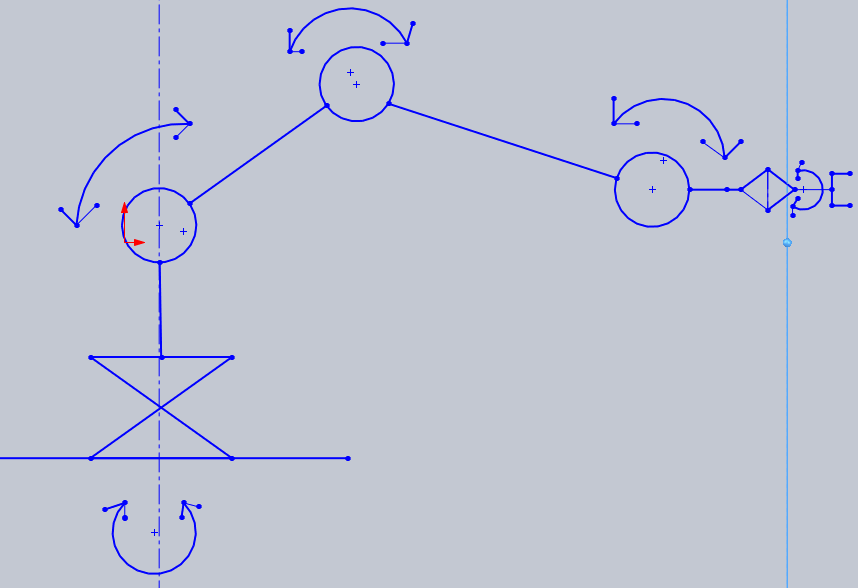
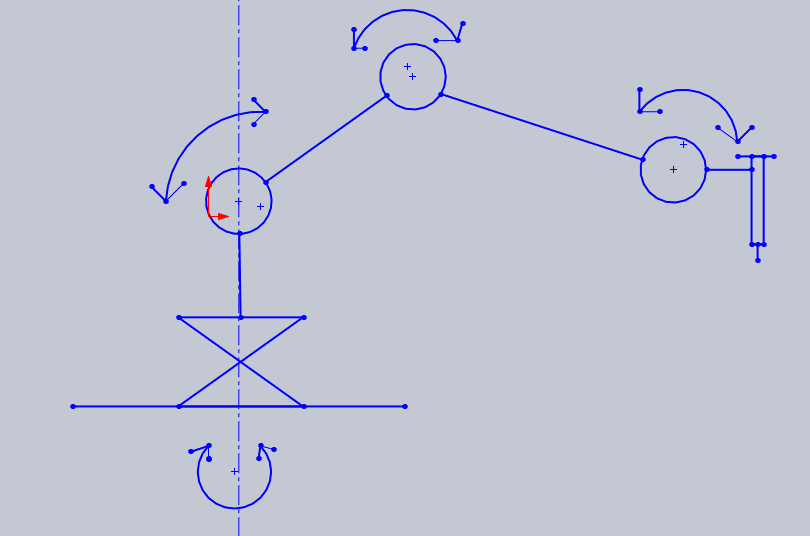
图2.3 抓取物体机械臂简图 图2.4 拧紧螺母机械臂简图
2.3.3机器人总体设计方案优选
在通过观看工业机器人加工视频,查阅工业机器人图片后,经过思考,最后设计出三种较为合适的方案进行分析优选。
方案一:方案一借鉴于大多数工业机器人,即一个机械臂完成所有工作装配工作,简图如图2,机器人有五个自由度,结构较为简单,完全符合完成所有动作自由度需求。但是由于装配工作涉及工件零部件的抓取和放置,以及螺母的拧紧,这就要求末端执行器能够实现两种功能。解决方法有以下三种:
1.设计具有所有功能的组合机械手,组合机械手需要同时具有夹取工件和拧紧螺母的功能,在装配进行到相应步骤时,选装机械手,更换不同功能的工作区。对整个装配过程来说,该方案较为方便,但是在有限的空间内对机械手进行传动设计和布置,设计要求和配置要求都比较高。
2.机械臂通过换接器与末端执行器相连接,在装配过程进行到拧紧螺母这一步时,通过辅助装置进行不同末端执行器的更换。该方案较为简单,但是涉及到末端执行器的更换,会导致装配时间增加,降低生产效率。并且需要配备相应的专用末端操作器库,增加生产成本。
3.在辅助工作台上设置工具悬挂架装置,将通用的手持式螺母拧紧机置于架上,在完成螺母的装配后,用手部夹持装置夹取拧紧机,对螺母进行拧紧。该方案较为方便,相较于方法1对末端执行器设计要求更加简单,相较于方法2,装配过程更加迅速。但是对末端执行器,即手部的夹紧力有较高的要求,手指形状设计也要能够实现拧紧机的固定。

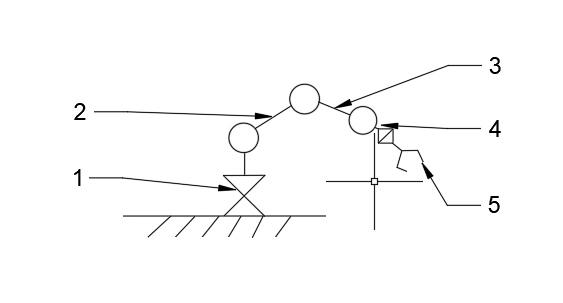
图2.5单机械臂工业机器人 图2.6 方案一机器人简图
1——基座 2——大臂 3——小臂 4——手腕
5——末端执行器
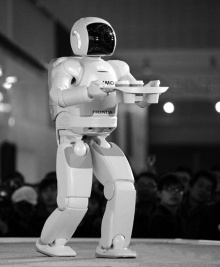
方案二:方案二则借鉴了人形机器人。人形机器人整体结构仿造人的结构进行设计,机械臂也是根据人的手臂进行设计的,人形机器人大都作为服务型机器人进行应用。人形机器人肩关节一般是由球关节代替,有三个自由度,而肘关节有一个自由度,腕关节有两个自由度。人形机器人的机械臂非常灵活,可以满足装配的要求。鉴于此,设计出了一个简化版的人形机器人,简图如下。由于使用了球关节,所以机器人整体结构复杂程度较高。在一定大小的机身两侧安装两个机械臂,使得在抓取物体时,机身两侧承受的力矩较大,这就导致了机器人手臂不能过长,工件质量不能过大等要求。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: