城市居民住宅区室内外公共环境卫生打扫智能机器人设计毕业论文
2020-02-17 19:43:09
摘 要
公共环境卫生打扫智能机器人属于我们生活中常见的一种清洁机器人,如今在市场上有很多类型,主要有扫地机器人、吸尘机器人等类型,属于智能电气的一种。它们通过人工控制或者自行控制,可以在一定的空间内自由完成各种清洁工作。现今市面上的机器人一般都是采用刷扫和真空吸尘,对地面杂物或灰尘等进行旋转刷扫,同时配合真空吸力将灰尘和杂物吸入自身的垃圾收纳盒中,从而完成清洁的工作,此外有的地面清洁机器人还会配备擦地功能。清洁机器人的应用与我们的生活非常相近,也成为当下的一种流行,无论是在自己家中还是大型的商场超市,甚至是大型工厂,扫地机器人都比较常见。随着现在科学技术的不断发展,清洁机器人的智能化也大大提高了,可以实现包括自我定位,障碍物的感应,自我规划路径以及自动充电等功能。
为此设计了一个能够实现扫地、拖地和擦拭等多功能的清洁机器人,此设计结构主要有机械手臂、移动装置、传动装置以及驱动装置等主要结构,并且装有距离传感器和红外测距传感器等感应装置,可以有效的避免碰撞以及避开障碍物。本次设计主要进行了该智能机器人的结构设计,并用AutoCAD进行零件的绘制和装配,对重要部位进行设计计算和校核分析来确定设计的合理性,从而使整体结构更加简单紧凑,实用性强。
关键词:打扫智能机器人;结构设计;三维建模;校核分析
Abstract
Public environment cleaning intelligent robot is a common cleaning robot in our life, now there are many types in the market, mainly sweeping robot, vacuuming robot and other types, is a kind of intelligent electrical. They are controlled by hand or by themselves, and can be cleaned freely in a certain space. The robot on current market is to use brush commonly sweep and vacuum vacuum to sweep to the ground sundry or dirt to undertake rotating brush, cooperate vacuum suction to suck dirt and sundry at the same time in the rubbish that oneself receive a box, finish clean job thereby, in addition some ground cleans a robot to still can be equipped with brush the ground function. The application of cleaning robot is very similar to our life, and has become a kind of popular at present, whether in their own homes or large supermarkets, or even large factories, sweeping robot is common. With the continuous development of science and technology, the intelligence of cleaning robot is also greatly improved, including self-positioning, obstacle induction, self-planning path and automatic charging and other functions.
Therefore devised a sweep and mop the floor can be achieved, and wipe the multi-function cleaning robot, this design mainly include mechanical arm structure, mobile device, transmission device and the drive device such as main structure, and is equipped with proximity sensor and infrared distance sensor sensing device, can effectively avoid collision and avoid obstacles. This design mainly carries on the structure design of the intelligent robot, and USES AutoCAD to draw and assemble the parts, and carries on the design calculation and check analysis to the important parts to determine the rationality of the design, so as to make the overall structure more simple and compact, with strong practicability.
Key words: Cleaning intelligent robot; Structural design; 3d modeling; Check analysis
目录
第1章 绪论 5
1.1课题研究背景与发展意义 5
1.2打扫机器人的国内外发展现状 5
1.2.1 国外发展现状 5
1.2.2 国内发展现状 6
1.3 本文研究方式 6
第2章 城市居民住宅区室内外公共环境卫生打扫智能机器人总体方案 8
2.1 设计的基本内容、目标 8
2.2 方案对比分析 9
2.2.1 方案一 9
2.2.2 方案二 10
2.2.3 方案三 11
2.2.4 方案对比 11
2.3 室内外公共环境卫生打扫智能机器人总体方案 12
2.4 打扫智能机器人工作原理介绍 13
第3章 打扫智能机器人结构设计 14
3.1框架结构设计 14
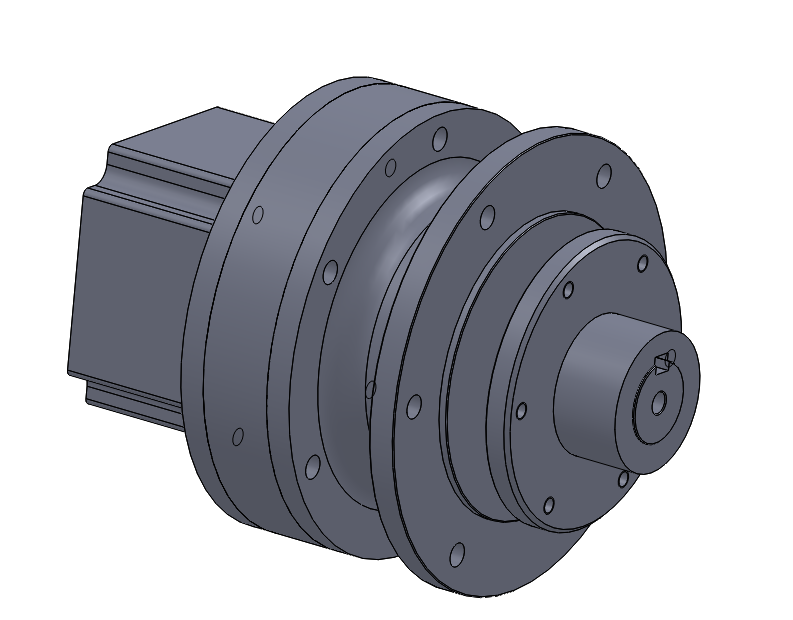
3.2机械手臂底座传动结构设计 15
3.3 机械手臂大臂与底座链接传动结构设计 16
3.4 机械手臂大臂与小臂传动结构设计 17
3.5 机械手臂小臂传动结构设计 18
3.6 机械手臂手腕和末端执行器传动结构设计 19
3.7 传感器设计与应用 20
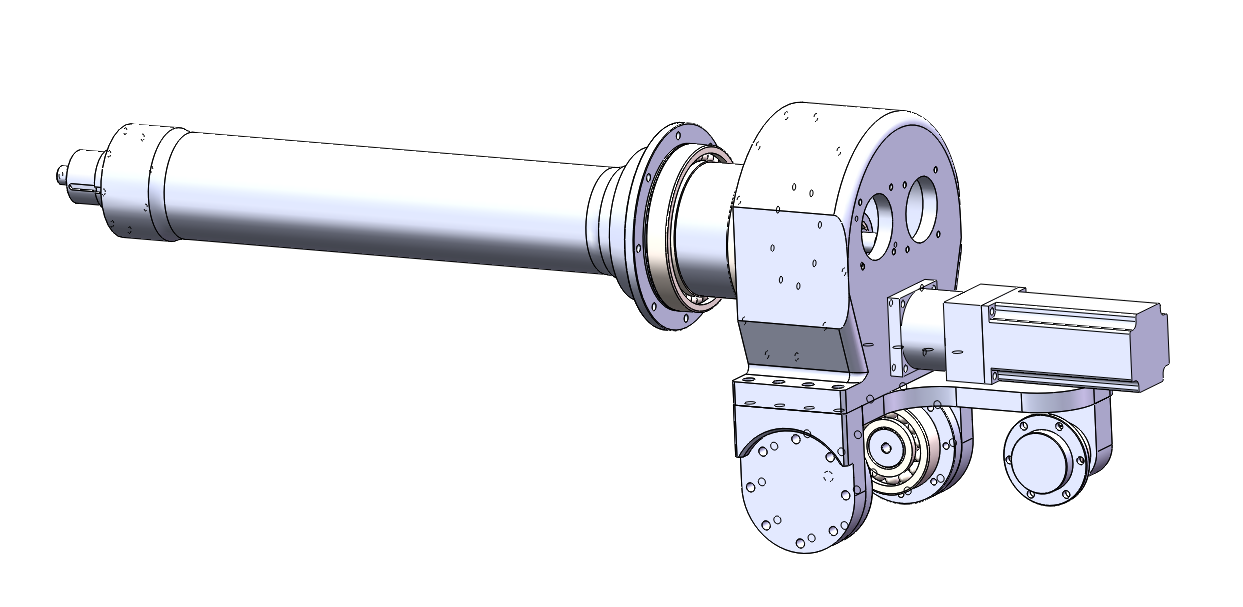
3.8 智能打扫机器人三维模型建立 21
第4章 重要零部件设计计算和校核 23
4.1 底座电机选择计算 23
4.2 蜗轮蜗杆传动设计 24
4.2.1涡轮蜗杆参数设计 24
4.2.2蜗轮和蜗杆主要几何参数计算 25
4.2.3蜗轮蜗杆主齿根弯曲疲劳强度校核 26
4.2.4蜗轮蜗杆涡轮蜗杆效率校核 27
4.3 旋转轴设计与校核 27
4.4 轴键的校核 28
总 结 29
参考文献 30
致 谢 31
第1章 绪论
1.1课题研究背景与发展意义
随着经济不断发展和机器人技术的进步,机器人在我国各个领域中的使用也变得越来越重要了。如今机器人被广泛应用于焊接、机械加工、喷涂、装配、运输等各个领域,也包括了医疗、军事、水下作业和家庭生活服务等各个方面,可谓是无处不在。机器人具有作业高精度、高效率、高负载、可靠性强等非常多的有点,也因此得到了各行各业的认可【1】。
自动清洁机器人是一种与人类日常生活息息相关的一种机器人,是服务类机器人领域的一个重要的课题。如今信息科技高速发展,人们的生活和工作节奏都很快,清洁机器人的使用,能够在很大程度上降低人们的劳动强度,将人们从冗杂的家务劳动中解脱出来。与此同时国家人口老龄化严重以及各个社会制度的完善,也给服务类型的机器人提供了广阔的发展前景【3】。与工业机器人的不同的是,服务型机器人主要作用是在日常生活中给人们一些服务和便利,它具有活动空间大,能在非结构环境下自由移动的特点。
因此智能型清洁机器人是能够自由地执行房间清扫的一种可以应用于家庭以及公共场所的服务型机器人,它汇集了包括人工智能技术、机械技术、电子传感技术、控制系统等多种技术。从上个世纪八十年代开始的最初研究,到现在多样化机型的成熟应用,智能清洁机器人的技术也越来越先进智能,在机器人的移动机械技术、图像处理识别、语音识别和传感技术上有了很大的技术提升。许多国家已经将机器人列为重点研究领域,可以说在未来几年智能型清洁机器人将会成为需求量最大的一种服务型机器人,未来还有很大的提升空间,所以智能打扫机器人有着很大的研究意义。
1.2打扫机器人的国内外发展现状
1.2.1 国外发展现状
在国外自动清洁机器人非常普及,几乎适用于每一个家庭,并且清洁机器人的更新换代非常快。最早进行扫地机器人自主品牌生产的是伊莱克斯公司,伊莱克斯最早研发的"三叶虫一代"类型的自动吸尘器是世界上第一台自动吸尘机器人,而其后期研发的"三叶虫二代"由于销售价格昂贵,销量并不是很好,虽然伊莱克斯公司是最早涉足家用清扫机器人的公司,但是在家用扫地机器人发展出去后并没有被广大群众接受。
而美国IRobot公司在2002年推出自有品牌机器人产品。在逐步的市场试测试以及合理的市场规划中抓准了该类产品今后将在市场中占有一席之地,所以持续的投入研发。另外Proscenic公司凭借着其原本在IC产业中的优势与研院合作开发,在2005年间迅速打开并占领了亚州和北美市场,如今已具备明显领先位置。而Irobot公司产品则是在美国和欧州的市场占据了主要地位。在2008年到2010年之间,清扫机器人的全球市场一直是被这两个大品牌占据了主导地位,两家公司的机器人销量在亚洲和欧美市场一直领先。Proscenic公司在日本的市场的销售量每年稳居第一,IRobot公司在美国市场一直也是稳居第一。
1.2.2 国内发展现状
在我国清洁机器人的使用并不是非常普及,还无法与发达国家相比较,因此清洁机器在我国的市场发展前景广阔。我国市场上销售的家用智能型清洁机器人多数还是是国产和合资品牌,无论是在扫地清洁干净度、产品性能以及产品外光等方面还是无法和发达国家相比,但是其价格上要相对便宜,价格上和国外相比还是具有一定的优势,所以目前国产清洁机器人具有较高的性价比【6】。由于在机器人核心专利技术方面有很多的限制,国内的机器人在清扫能力以及智能程度这些方面与一些大品牌还是存在比较明显的差距,比如Irobot和Proscenic这些大品牌的外资公司都拥有自己的清扫系统的设计专利。我国现有国产清洁机器人人的技术还是相当于国外在2007年所使用的早期技术。随着社会现代化的提高,自动清扫机器人逐渐地像电视和冰箱等必备家电一样走进大多数的家庭,成为家庭中不可或缺的一部分。清扫机器人也成为了我国现今服务型机器人领域中一个非常热门的研究方向。清洁机器人将更为明显地降低人们的劳动强度,也大大提高了劳动效率,它可以在酒店、住宅区庭院、办公场所、市区街道以及个人家庭等各种场所使用。正因如此,我国还是需要自主研发清洁机器人,让其既具备科研上的可行性及挑战性又具有相当广阔的市场展望。
1.3 本文研究方式
本文主要设计一种可适用于城市居民住宅区室内外公共环境卫生打扫智能机器人,通过将在大学所学的理论知识以及实际应用相结合来完成设计,培养独立设计的能力。本设计主要从机器人研究背景意义出发,了解国内外家用清洁机器人的发展现状,确定了整体的机械结构方案。方案确定后进行三维建模,并结合相关理论基础对关键零部件进行计算选型和强度校核,确定本文设计方案的合理实用性。
第2章 城市居民住宅区室内外公共环境卫生打扫智能机器人总体方案
机器人作为一种自动化机器,具有高度灵活性,同时还具备一些与人类相似的智能,例如感知能力、行动能力、规划能力和协调能力。特种服务机器人是能代替特种工作服务人员更高效、准确执行各种工作,并通过自身的动力和控制系统来实现各种功能的机器。机器人能够接受人类的命令,也可以依照预先编排的程序运行,按照人工智能技术制定的原则来行动。
2.1 设计的基本内容、目标
本课题需要完成城市居民住宅区室内外公共环境卫生打扫智能机器人总体设计,以及多功能机械手部件的设计。通过对机器人技术的研究与分析,完成机器人整体结构的设计和机械臂的设计等。要求机器人能完成移动、扫地、拖地、擦扶手以及躲避障碍物、更换清洁工具等基本功能,同时可以记忆行动路线以及工作流程。对于同一个小区的清扫任务可以进行预设,经过一遍人工操作后可以记忆路线,在之后使用时可以调出,从而达到自动清扫的任务。本次设计的打扫智能机器人的优点以及具体目标如下:
1.室内外公共环境卫生打扫智能机器人在使用时能够节省时间,提高工作效率。其中安全性是必须考虑的因素,要确保机器的运行安全。在机器发生故障的时候能够及时的停止工作。
2.室内外公共环境卫生打扫智能机器人结构简单,加工制造安装都很方便,并且便于操作和维修,经济性是衡量一个机器的重要指标之一。在满足目标及使用要求的前提下,要尽可能的降低成本。
3.要求室内外公共环境卫生打扫智能机器人在工作时所产生的震动要尽可能小,噪声也相对较小。运行的可靠性也需要评估,其可靠性越高运行过程中发生故障的可能性就会越小,在运行的过程中就越稳定,这样机器的使用寿命也越长。
在本次设计中,室内外公共环境卫生打扫智能机器人主要包括以下几部分:机械框架、机械手臂、行走履带、传感器模块、垃圾回收箱、清洁工具等。
2.2 方案对比分析
2.2.1 方案一
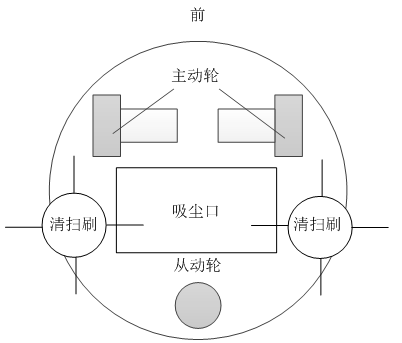
图2.1 方案一:清扫机结构示意图
这个方案主要是一个家用的清扫机,主要结构包括行走构造以及吸尘装置等,如图2.1所示。机器人需要发生自主运动,运动的状态也会经常性的由周围环境的不同而发生改变,所以必然会发生一定的冲击和振动。因此,应保证机器人的运动情况下,保证其运动的平稳度,需要提高其动力学特性。为此,在设计时要留心,在满足日常家庭使用时所必备的强度要求下,要尽可能地减轻运动部件的重量,并留意部件与转轴的装配需要质心装配。
为了使清扫机能够较好地直线行走,使用双电机带动两轮运动的方法,并在清扫机的后面安置一个不锈钢滚珠,从而使其能有较好的灵活度和移动能力【7】。前轮驱使机器运动的好处是:当机器需要转向的时候能有较为灵活和大幅度的转动。因为一般来说前轮是转向轮,所以当机器需要转向时行驶时,更加容易控制机体整体方向,从而大大减少出现过量或者过小转弯方向的情况,转向时的稳定性也得到了提升。
清扫机中使用电动机带动下面的两个清扫刷工具,使得左面清扫刷子可向顺时针方向进行转动,右面的清扫刷子则是相对的反方向转动,这样就可以在转动时地面上的灰尘将会被聚集在于吸尘装置的吸风口处。吸尘装置意旨在利用强力的吸引力,在这里我们可以采用现在市场较为流行的尖端气流滤尘技术,将聚集在一起的细小灰尘,全面方位地,又多层次数地将其吸入储存箱中,从而做到清扫地面灰尘的效果。擦地机构是机器人在前面几个步骤之后,最后才完成收尾工作的。当灰尘等一系列可浮动物体打扫干净之后,利用安装于机器下方的蘸湿带有洗洁液的布料,在连杆机构与偏心轮等的作用下,将地面的污渍可强力清除,从而保证地面干净,卫生。但这种清扫机只能适用于家庭等场所,同时无法完成较大体积垃圾的清理,以及除地面以外的清洁。
2.2.2 方案二
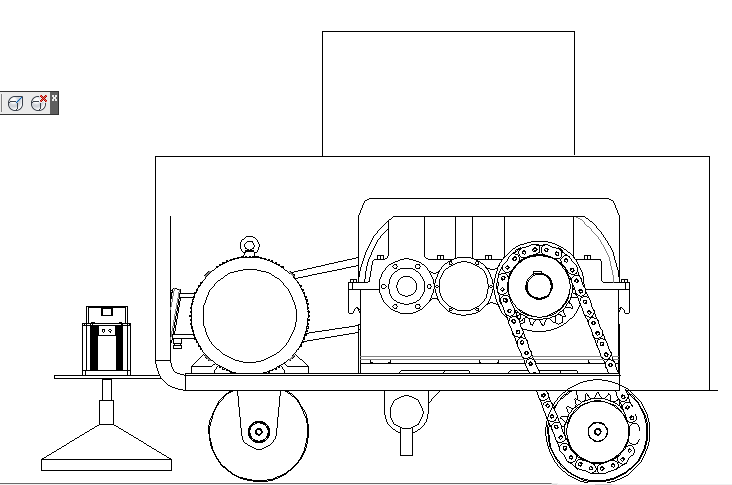
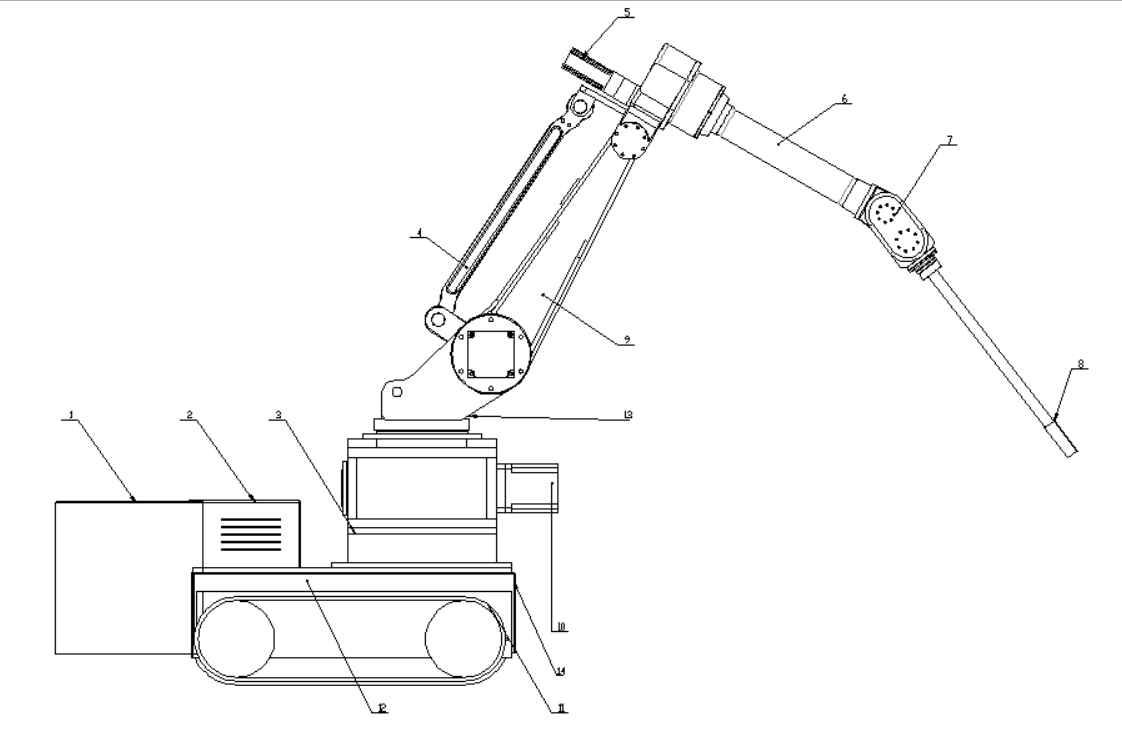
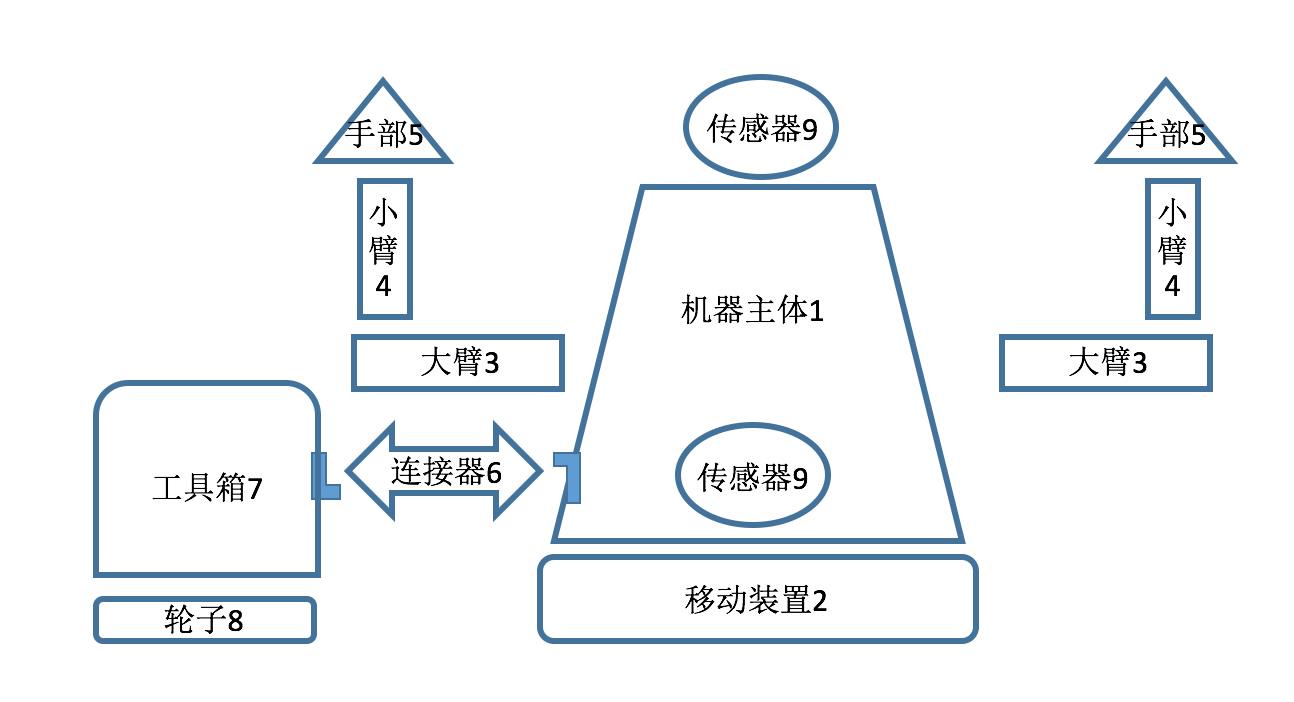 图2.2 方案二机器人整体结构图示意图
图2.2 方案二机器人整体结构图示意图
方案二机器人整体结构如图2.2所示,主要包括移动机构、躯体、机械臂等部分组成。机器人主体1设有传感器9,主要分为内部传感器和外部传感器,内部传感器作用是监测机器人本身的工作状态,包括检测手臂的位置和角度等,外部传感器用来检测机器人所处的环境及状况,可以对物体进行识别,判断与物体的距离,抓取的物体状态等,具体包括光感传感器、距离传感器、力觉传感器等,可以完成障碍物识别、垃圾检测、状态检测等。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: