关于风洞收敛段的模拟驱动设计外文翻译资料
2022-11-05 11:37:51

英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
关于风洞收敛段的模拟驱动设计
关键词:模拟驱动设计、数值优化、基于代理的模型、低速风洞、实验鉴定
摘要:
低速风洞的设计是为了研究小型飞行器通过流体的场景,该风洞是一种开放吸入式类型,由一个带有湍流相屏的蜂巢状方形入口,沉降室、收缩口、实验室、扩散室和轴流式通风机组成。在本文中,我们细致的描述了收缩段的最佳设计,这是在实验中获得高品质流体的关键。高保真度的计算流体学的流体解算软件被用来得到非线性的流体物理形态,由于计算流体学的计算成本较高,基于代理的优化设计(SBO)用来加速设计进程,SBO方法通过迭代优化而得到一个适当正确的低保真度模型取代了直接优化高品质(准确但计算昂贵)模型,这里,我们利用可改变仿真度的计算流体学仿真,也就是用一种简单的乘法响应校正技术去创造风洞收缩段的替代模型。使得我们能用较低的计算成本来优化去优化它的形状。据我们了解,这是首次运用仿真度可变的代理模型设计风度的收缩段。用在高仿真度的计算流体学仿真理论证明了最佳喷管的设计。同时也经过了拼装式风洞的实验研究的实验数据的验证。实验验证结果证明了被用来设计收缩段获的数值最佳化设计流程的正确性。
- 简介
我们机构一直在研究用来进行流体动力学研究的低速风洞。利用该设备将进行包含微型飞行器的固定翼和摆动翼的研究。风洞内进行的工作包含微型飞行器各方面的分析,例如:翼的形状和扑动参数,以及操纵的有效性,对于用来预估微型飞行器在低雷洛系数(Re〈100000)下空气动力学特性的可能能力的设备,高的流体质量是很重要的。其要求的最小流速范围是从0~20m/s。
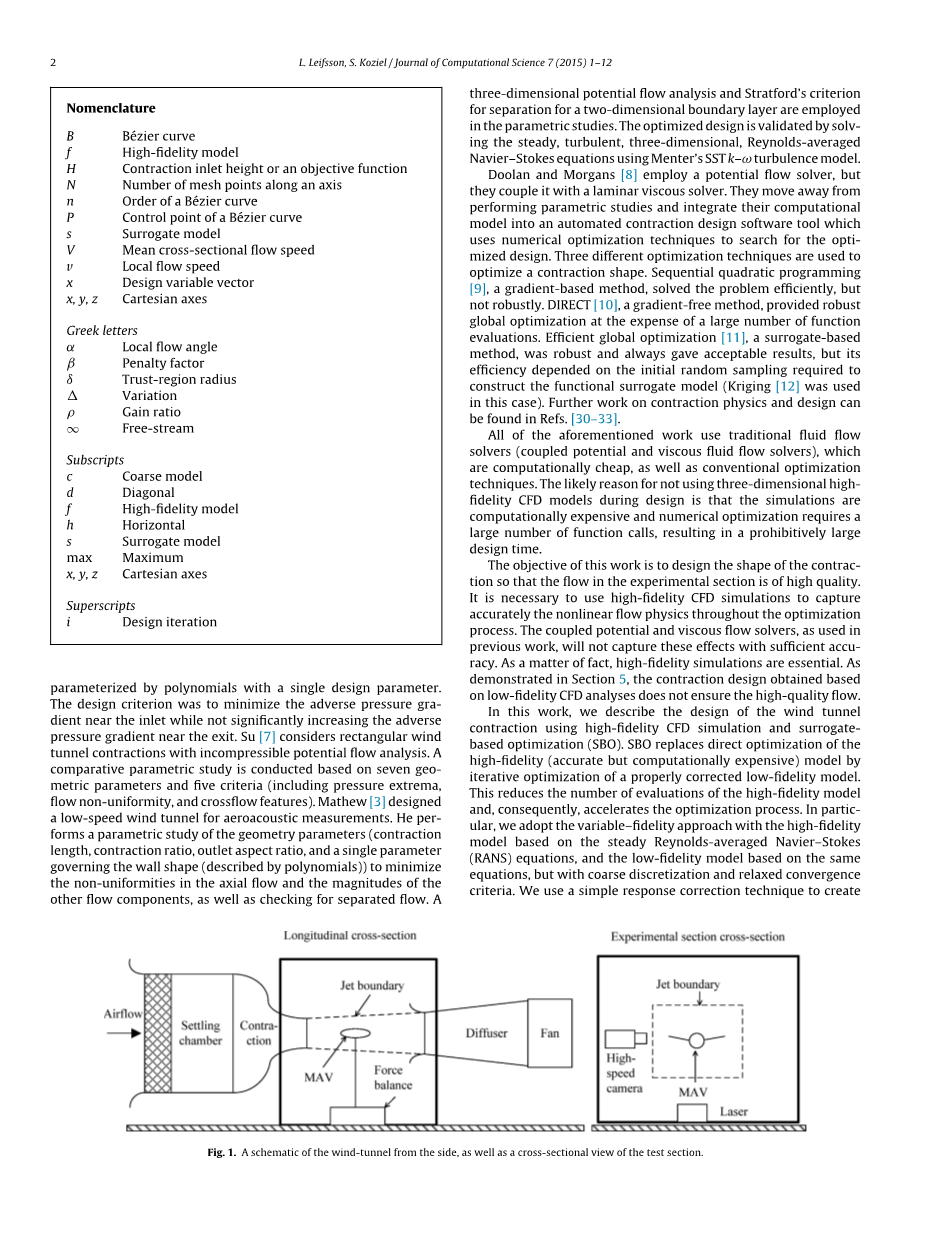
如图一所示,该风洞是一种开放式吸入式类型,,它是由带有蜂巢网状物和湍流相屏的方形入口、沉降室、收缩段、实验室、扩散器和轴流式通风机。实验室位于一个大的围场里,装有实验设备(微型飞行器)和仪器(例如测力天平、高清摄像机或者粒子图像测试系统)
图1:风洞整体原理图和风洞实验段的剖面图
收缩段能够加速和稳定流体进入测试部分,因此,收缩段是风洞在工作区提供高品质测试流体的关键组成部分。收缩段的尺寸和形状决定了流体在出口的品质,如流体的角度和均匀性,同样还有湍流的强度的等级。收缩段应该足够短来减少边界层的增长,离开收缩段的流体应该是保持一致性和稳定性。由于收缩段的流线型曲率,流体损耗可以被完全避免。由于形状对流体的影响是高度不确定的,因此使用计算流体学去做收敛段的关键特征的设计决定是有必要的。例如长度、收敛比,尤其是墙面的形状。这些工作见诸于马修及其其同事,Watmuff,苏,杜兰和摩根及其同事等。前三位研究内容是相似的,他们都是采用潜在流体分析和可行性分析去寻找最佳的设计。最后一位使用数值优化的方法。
Watmuff使用潜在流体分析设计了一个轴对称的低速风洞收敛段。墙的形状是由一个设计变量的多项式进行参数化设计,设计的关键是最小化入口处的逆压梯度,进行基于七个几何参数和五个标准(如压力极限、流体不均匀性和横向流体特征)的比较化研究,马修设计了一种低速风洞用于空气声学测量。他进行了几何参数(收缩段长度、收缩比、出口横纵比、和控制墙体形状(由一个多项式进行描述)的单一参数)的参数化研究使得流体的非均匀性和流体的其他部分的量级最小化。同样还能对分离流进行零位调整,一个三维的流体潜能分析和关于对二维边界层的分离的斯特拉特福德标准被用来进行参数化研究。这种使用门特的SST k-w湍流方程的优化设计已经被证实能解决稳定性、湍流,三维问题、平均雷洛数的纳维-斯托克斯方程。
杜兰和摩根使用了势流解算器,但他们将它和层流粘性解算器结合在一起,他们没有使用参数化分析,而是将他们计算的模型整合到自动收敛段设计软件工具上,她使用数值优化技术去寻找最佳的设计。三种不同的优化手段用来优化一个收敛段模型,序列二次规划法一种基于梯度化的方法有效的解决了这个问题。但不强劲,DIRECT,一种自由梯度方法以大量的功能函数为代价提供了一种强劲有效的整体优化,整体最优化,一种基于代理的手段,是强劲的,总能给予准确的结果。但是它的有效性取决于最初的需要建立功能替代模型的随机样本(这种情况下,克里格法被使用)。在收缩段的物理研究和设计的将来的工作能够以此为参考。
上述所有的工作使用的是传统的流体流动解算方法(潜在性与粘性组合流体流动解算方法),这些方法的计算成本低,同时也是传统的最优化技巧。在设计过程中不使用三维高品质的计算流体学模型的原因可能是仿真的计算成本高昂,数值化优化设计需要大量的函数调用,导致了过分的大量设计时间。
本论文研究的目标是去设计收敛段的形状,以此来获得实验部分的高流体品质。在整个最优化设计过程中有必要去使用高品质计算流体学仿真去获得准确的非线性流体物理特性。先前工作中使用的潜在性与粘性组合流体流动解算方法不能获得足够准确精度的效果。事实上,高品质的模拟是重要的。在第五章证明:基于低品质的计算流体学分析获得的收缩段的设计不能确保高品质的流体。
在本论文中,我们描述了使用高品质计算流体学仿真和基于代理的最优化风洞收敛段设计方法。基于代理的最优化设计方法代替了高品质模型直接最优化设计方法(准确但是计算昂贵),它通过迭代最优化设计获得一个合适的正确的的高品质模型。它降低了高品质模型的评估数据。并且因此加速了最优化的设计进程。尤其是,我们将基于稳定的平均雷洛系数的纳维-斯托克斯方程的变保真度的手段应用到高保真度模型中,虽然低保真度模型也是基于此方程,但是,粗糙的离散化和宽松的融合标准下,我们使用一个简单的响应较正技术去创造一个替代品,它随后被用作一个预测工具去获得一个类似最佳的高品质模型。在完成收敛段的最优化设计过程中,整个风洞被制造和装配。在试验段的流体品质的物理测量方法已经准备好去证实最终的风洞设计。尤其是,我们已经计划测量在实验测试段横截面的流体流速,实验结果以及将其与我们计算的模型获得的数据进行比较已经在准备中。
- 问题的提出
在这个章节,我们描述了设计问题,定义了设计目的和约束条件。我们也规划了我们的解决方案和对于三维收敛段的形状参数化方法。
2.1 风洞的尺寸
风洞的整体轮廓的设定在设计收缩段的侧面轮廓之前,因为入口是一个方形的,尺寸为2mX2m。沉降室的长度是1.5m。方形的收缩段紧随沉降室之后,其长度是2m。按照马修的研究,采用的面积比是8:1,因此收敛段的出口是一个面积为71cm2的正方形。试验段的轴向长度是1.8m。连接扩散器的那段的开口是80cm2的正方形。通过一个两米轴向距离过度到一个直径为1m的圆。那里连接着一个轴流式风扇。这个风洞的整体长度大约是8m。为了能够实现在实验段的流体流速为大约20m/s,体积流动率至少要达到40000m3/h。
2.2 设计目标
设计目标是确定一个收敛段的形状能够使得均匀的流体通过试验段。一种典型的方形三维收敛段的形状见图2.a和图2.b。在出口处,流体必须是均匀的,边界层需要尽可能的薄使得可利用的横断面积尽可能的大。因此整体目标是,在速度和角度一定的情况下,最大化出口处的流体的均匀性。更重要的是,我们希望减少出口平面的速度和角度在水平和角度控制的方向上的变化,见图2.c。由于对称性的原因,在垂直方向上就不需要考虑了。上述的目标正式见诸于4.1节,因此此设计进程能够通过数值优化进程执行。
图2 (a)三维收缩段的轴测图;(b)x-z对称面的上半段;(c)出口平面的控制方向
2.3 设计的变量
控制收缩段形状的变量是入口的尺寸、收缩段的面积比、长度、和墙的形状。为了简化我们的问题,我们将固定我们的入口面积、收敛段的面积比和长度。在这个关键的工作中,这是有必要的;因为实验室能够容纳风洞的尺寸是有一定限制的。有了这些参数的确定,变量的主要参数将取决于墙的形状。
收敛段的墙的形状将取决于对称平面的贝塞尔曲线。贝塞尔曲线的变量n被定义为:
其中:Pi,i=0,1,hellip;n是控制点,t是一个1xm的数组,其词目是从0到1。多个控制点代表着一种墙的形状。这里,我们使用五个控制点,如图3所示,第一个控制点固定在入口高(顶点)h的地方。控制点2和4固定在水平面方向。第三个控制点是自由的。也就是说,他们能在水平面和竖直平面上自由移动。第五个控制点固定在出口处的顶点上。总之,这里有四个设计参数,设计的变量向量能够被写为:x=[x2,x3,z3,x4]T。
图3 在对称平面上的收缩段墙体形状的贝塞尔曲线(实线)和五个控制点的控制线(虚线)
- 计算流体动力学模型
一个单一的计算流体动力学仿真包括,基本上,四步:几何代入(在2.3节中有描述),解域的划分,控制流体流动方程的参数解,流体结果的后期处理。这些包括:在数值优化的前提下,处理目标和约束条件。在这个环节,我们描述了高品质流体模型的构思。
3.1 控制方程
流体被假设为稳定的,三维的,不可压缩的以及混乱的。这个稳定的平均雷洛数的纳维-斯托克斯方程被视为有统治力的流体流动方程。作为流体的媒介-空气被视为理想气体。通过萨瑟兰公式下的动态粘滞度,湍流被门特的剪切应力输出k-w模型所模拟化。这个SSK k-w湍流模型在逆压梯度和分离状态下的复杂的边界层流体是合适的。
3.2 计算网络
收敛段关于xy平面和xz平面对称,因而,计算范围为收敛区域的四分之一,见图2.a。网格是下贴体坐标结构化网络,带有四边形元。这些元是关于沿着x,y,z和Nx,Ny,Nz方向参数化的。其分别见诸于图4。这里,我们设定Ny=Nz。网眼在靠近墙体的部分是密集的,以便去捕捉边界层的效应。一个网格样例见图5,它表现了网格的构造和拓扑学。距离第一个节点上面的墙上设置的无因次y 墙距离小于1。一个参数化研究被用来决定合适的网格参数。结果展现在3.4节。
3.3 流体计算
参数化分析采用有限元方法和一个压力修正的流体公式。在任何情况下,渐进收敛是一种稳定的公开的手段。迭代收敛是通过监视整体的剩余来进行检查。它是整个计算领域的全部元素的总和关于在每个元素被解决的调整方程的L2泛数。一个维克多的边界条件被规定在入口处。初速度调到和一个给定的容积流率的横截面的平均初速度。一个横截面(这里我们假定收敛段出口处的边界层的厚度为零)在出口处的压力边界条件被规定其压力与环境压力一致。边界条件在xy-和xz-平面被描述为对称的。一个无滑移的边界条件被描述在收缩段的表面。
3.4 网格独立性研究
一个相关性好的参数化研究是由参数化研究来评判,(一开始的形状用在优化研究中展示于5.2节)容积流率定在40000m3/h。(在2.1节有提及)水平方向不同的四个网格按照一定方式配置和分别仿真。滤网是Nx=15,Nz=15(2800目),媒介网是Nx=25,Nz=40(37000目)筛网是Nx=50,Nz=80(306000目)精密网是Nx=100,Nz=160(2503000目)。
参数化研究的结果见于图6,比较在出口处流体的速度和角度的区别,在速度方面,筛网和超细筛网是相似的,而媒介网和滤网的结果是不同的。筛网和超细筛网在接近表面的地方速度急剧下降尤其是在接近拐角处。(见图6(b)对角速率分布),然而媒介网和滤网则没有。媒介网的速度分布相比筛网更显著的接近细网的结果。角度分布的匹配程度更好在不同网之间。尽管,媒介网和细筛网的结果更接近相比粗筛网。总的来说,媒介网和细筛网之间的不同是很小的,除了在对角线方向末端的速度分布。细网和超细网之间的结果是很相似的,因而,我们能够推断,细网是足够稠密能充分捕捉流体的物理特性,能够被用来推测在优化设计过程中,收敛段的特征。
图4 网眼参数
图5 一些平面和边的计算仿真网格图(网格密度可视化变粗)
图6 在不同网眼密度下参数化研究的速度和角度的曲线
4 最优化方法论
在这个环节,我们描述了最优化喷嘴的方法。正于2.1节所描述的,目标是获得尽可能一致的速度场v,v是四种形状参量x = [x2 x3 z3 x4]T的函数(比较2.3节)。在下文中,这里被用来设计喷嘴形状的基于代理的优化方法,同样用在基于低品质计算流体动力学模拟的替代模型的建设。
4.1 目标函数
正于2.1所解释的,我们对减小速度大小和关于两个控制方向水平面和垂直面的速度角度的变化,表示为vh.f (x,t), alpha;h.f (x,t), vd.f (x,t), alpha;d.f (x,t),在范围0le;tle;1(0于喷嘴的中心保持一致,1相当于喷嘴的管壁)。下脚标f表明:模型与高品质计算流体动力学模型有关。在水平方向,我们感兴趣于减少vh.f (x,t)和alpha;h.f (x,t)在范围0le;tle;0.9(避开边界层范围)
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[139943],资料为PDF文档或Word文档,PDF文档可免费转换为Word



