面向安全的自动驾驶汽车总体布置设计毕业论文
2020-02-17 10:53:21
Wuhan University of Technology Graduation Design (Thesis)
Micro-unmanned electric bus brake system design
School: School of International Education
Specialty amp; Class: Automotive Engineering gj1502
Name: Deng Hao
Tutor: Pei Xiaofei
Statement of Degree Thesis originality
I solemnly declare:The thesis submitted is the research result independently obtained by myself under the guidance of my tutor. Except for the contents specifically quoted in this thesis, this thesis does not include any other works that have been published or written by individuals or groups. I fully understand that the legal consequences of this statement are borne by me.
Author’s Signature:
Date:
Using Authorization of Thesis copyright
The author of this thesis fully understands the provisions of the school regarding the protection and use of thesis, and agrees that the school retains and sends copies and electronic versions of the thesis to the relevant thesis management departments or institutions, allowing the thesis to be viewed and borrowed. I authorize the provincial excellent bachelor thesis selection institution to compile all or part of the thesis into relevant data for retrieval. The thesis can be saved and compiled by photocopying, printing or scanning.
The thesis belong to 1、Confidentiality囗,Apply this authorization after the year of declassification)
2、No Confidentiality囗 .
(Please type “√” in above relevant block)
Author’s Signature: Date:
Tutor’s Signature: Date:
Abstract
This paper intends to explore and study how to reasonably layout design the sensor of the self-driving car, to ensure the safety of the self-driving car. At the same time, the design of the dual-bus and vehicle circuit distribution of the self-driving car is needed, and the circuit structure and data transmission difference between the self-driving car and the conventional car are clarified. Of course, it should also consider the reliability redundancy design of the car, such as the design of the dual controller, dual actuator and dual power system.
By consulting relevant literature, we can understand the working principle and structural composition of self-driving car, and study the feasibility of the project objectives. Learning and studying the principles and characteristics of related sensors (including cameras, radars) of the Context-Aware system, we design and optimize the optimal redundancy, and ensure that the self-driving car sensor arrangement can bring enough security. Understanding the working principle of CAN bus, we know the data communication mode between components, and divide the CAN network nodes in a targeted manner to optimize the node layout while ensuring normal data communication. To consult the relevant literature to understand the driving safety redundancy design of self-driving cars, and we develop a dual-controller, dual-actuator, dual-supply and dual-bus system design for self-driving cars to ensure that a car can still operate normally with faults in some components and systems. On the basis of the above, we organize all the data, and use the drawing software to design the layout and draw the relevant drawings.
Through design analysis, this paper has a relatively systematic normative design on the overall layout of self-driving car, and has a solution to the redundant design of autonomous vehicles, which has certain practical significance.
Key Words: Redundant design; Vehicle circuit; Bus design; Context-Aware system.
Contents
Abstract I
Chapter 1 Introduction 1
1.1 Research background 1
1.2 Research status at home and abroad 1
1.3 Research work and thesis structure of this paper 3
Chapter 2 Context-Aware system of the Self-driving car 4
2.1 Related background of self-driving cars 4
2.1.1 Classification of self-driving cars 4
2.1.2 Related Sensors of the Context-Aware system 5
2.2 The Context-Aware technology solution of Self-driving car 6
2.3 Design of Context-Aware system 7
2.3.1 Vehicle Motion Module 7
2.3.2 Context-Aware Module 8
Chapter 3 Communication bus design of the Self-driving car 14
3.1 Automotive Communication Bus 14
3.2 Self-driving car bus design 14
3.2.1 CAN bus design 15
3.2.2 FlexRay bus design 19
3.3 Dual bus design of the Self-driving car 19
Chapter 4 Power supply circuit design of the Self-driving car 22
4.1 Dual power supply design 22
4.2 Vehicle power distribution map design 23
Chapter 5 Redundant design of self-driving car actuator 25
5.1 The meaning of the redundant design of the actuator 25
5.2 Redundant Steering System Design 25
5.2.1 Steer by wire system 25
5.2.2 Redundant design of the SBW 26
5.3 Redundant design of the braking system 27
5.3.1 Electronic Hydraulic Brake System 27
5.3.2 Redundant design of the EHB 28
Conclusion and Outlook 30
References 31
Acknowledgement 33
Chapter 1 Introduction
Research background
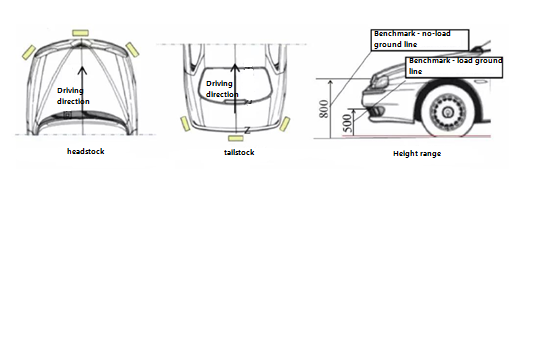
In recent years, the automobile industry has begun to show a huge wave of innovation, rapidly moving towards electrification, networking and intelligence. The development of self-driving cars will have a profound impact on the automotive industry and the transportation industry. To achieve automatic driving, the Context-Aware system is one of the key technologies. The Context-Aware system needs to quickly obtain relevant data information of the driving environment, such as the target within a certain range of the vehicle, the guidance of the lane line, and the traffic road information. The control system of the self-driving car needs to make corresponding path planning and decision according to the information fed back by the Context-Aware system, combined with the high-precision navigation system, to realize safe automatic driving. At present, auto-driving technology is rapidly developing, and the use of Context-Aware system is becoming more and more common.
At the same time, the reliability redundancy design of self-driving cars is also developing rapidly. The reliability redundancy design of the automatic driving system generally includes bus, power supply, positioning, sensing, controller and actuator. The reliability redundancy design is mainly to avoid serious safety accidents caused by the failure of automatic driving system due to a certain component or system. It ensures the safety of pedestrians and passengers.
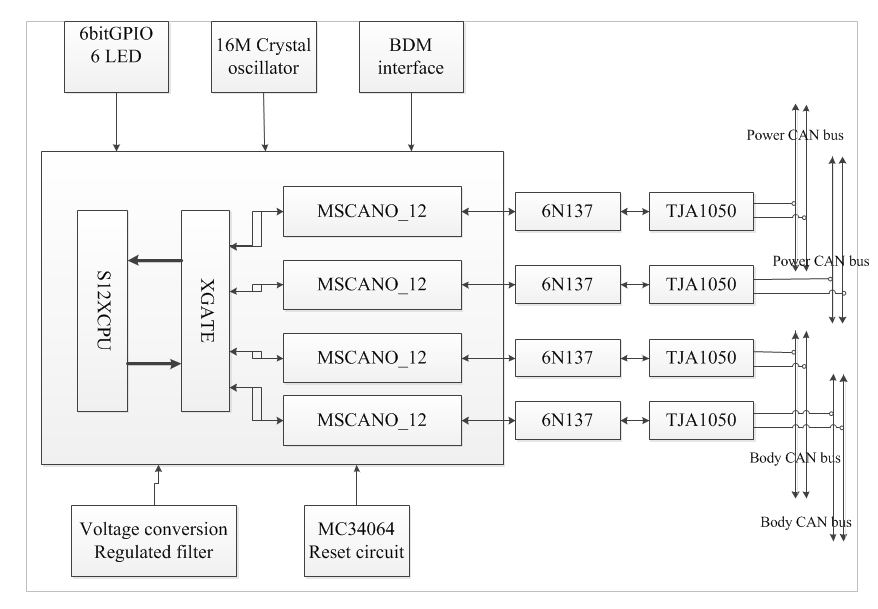
Of course, communication between components is also important. In the automotive bus, due to the high-performance, high-reliability communication mechanism of the CAN bus, the CAN protocol is widely used for communication between various components in the car, and the CAN bus can replace the expensive and bulky distribution harness. Therefore, the current main bus in the car is composed of the CAN bus, as well as in the self-driving car. However, due to the high bandwidth requirements of various sensors in the autonomous vehicle environment sensing system, especially the lidar and high-resolution cameras, it is also necessary to transmit data using the Flexray bus.
Research status at home and abroad
Most of the foreign auto-driving car technologies detect the dynamic obstacles by analyzing the laser sensor data. On behalf of Stanford University's smart car "Junior", the laser sensor is used to model the motion geometry of the tracking target, and then the Bayesian filter is used to update the state of each target separately; Carnegie Mellon University's "BOSS" smart car The obstacle features are extracted from the laser sensor data, and the dynamic obstacles are detected and tracked by correlating the laser sensor data at different times. The self-driving car "WildCat" developed by Oxford University uses laser radar and cameras to monitor road conditions without using GPS.
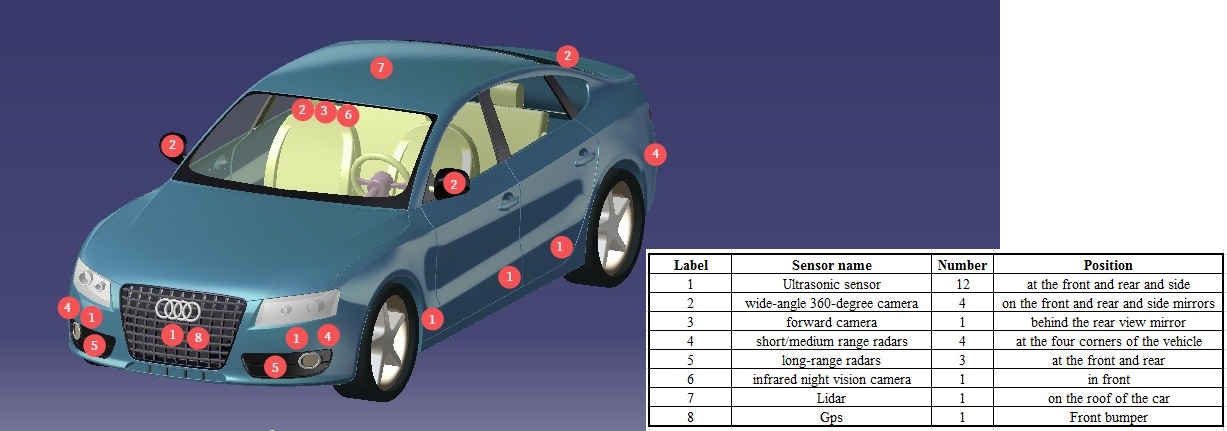
The Ohio State University and the Oshkosh Truck Company have developed the Terra Max intelligent driving vehicle. The car is equipped with an advanced sensor system and Global Positioning System (GPS). In order to obtain information on objects within a certain distance of the vehicle, 24 environmental sensing sensors such as a camera, a laser radar, a millimeter wave radar, and an ultrasonic radar are installed.
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: