自动驾驶汽车LCM通信协议设计毕业论文
2020-02-17 10:53:32
摘 要
随着科学的发展进步,在传统汽车上已经应用了很多驾驶辅助系统来降低驾驶员的驾驶疲劳强度,但汽车只有实现完全意义上的自动驾驶,才能使驾驶员在车上完全解放。自动驾驶汽车的实现基础是环境感知,目前环境感知需要借助超声波雷达、激光雷达、摄像机等传感器探测采集汽车周围障碍物数据,然后发送至MicroAutoBox分析处理,对汽车行驶路径做出规划,进而将命令下达至执行器。虽然现有的汽车上的网络通信协议发展速度较快,但仍然无法满足激光雷达等传感器数据传输需求。
本文首先分析了汽车网络技术的发展状态和趋势,对比分析了各种通信协议的通信效率。进一步了解的计算机网络的通信机制,对比各种类型的通信协议,选定了高速率传输数据包的UDP轻量级通信协议。然后在VS2013平台上使用C语言搭建仿真实验平台,设计实验验证和研究UDP协议传输数据包的特性。最后掌握激光雷达采集数据特性,将UDP协议与激光雷达实际数据传输相联系起来,设计出一种自动驾驶汽车上可用轻量级通信协议以及数据包格式设定方案。
关键词:自动驾驶;环境感知;UDP协议;规划层;激光雷达
Abstract
With the development of science and progress, a lot of driving assistance systems have been used in traditional cars to reduce the driver's fatigue strength. However, only when the car is completely autonomous can the driver be completely liberated in the car. The basis of the implementation of self-driving cars is environmental perception. At present, the environmental perception needs to detect and collect the data of obstacles around the car with the help of ultrasonic radar, laser radar, camera and other sensors, and then send the data to MicroAutoBox for analysis and processing, so as to plan the car's driving path, and then send the order to the actuator. Although the existing network communication protocol on the automobile develops rapidly, it still cannot meet the data transmission needs of sensors such as laser radar.
Firstly, this paper analyzes the development status and trend of automotive network technology, and compares and analyzes the communication efficiency of various communication protocols. After further understanding of the communication mechanism of computer network and comparing various types of communication protocols, UDP lightweight communication protocol with high rate transmission packet is selected. Then, on the VS2013 platform, the simulation experiment platform was built with C language, and the experiment was designed to verify and study the characteristics of UDP protocol transmission packets. Finally, the data acquisition characteristics of the laser radar are mastered, and the UDP protocol is connected with the actual data transmission of the laser radar to design a lightweight communication protocol that can be used in self-driving cars, and the simulation experiment verifies that the protocol can stably transmit the data collected by the laser radar.
Key Words:Autonomous driving; Environmental perception; UDP protocol; Planning layer; Laser radar
目录
摘 要 3
Abstract 4
第1章 绪论 7
1.1 研究背景及意义 7
1.2 国内外研究现状 9
1.2.1 自动驾驶汽车国内外研究现状 9
1.2.2 轻量级通信国内外研究现状 11
1.3 论文研究目的 13
第2章 车载网络技术相关概述 14
2.1 车载网络介绍 14
2.3 车载以太网 15
2.3.1 以太网简介 15
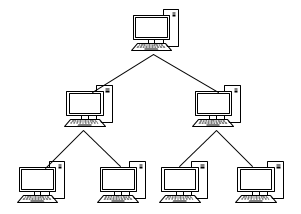
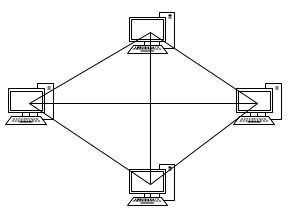
2.3.2 以太网的拓扑结构 16
2.3.3 以太网访问媒体的基本过程 18
2.3.4 数据包格式 19
第3章 通信协议相关概述 21
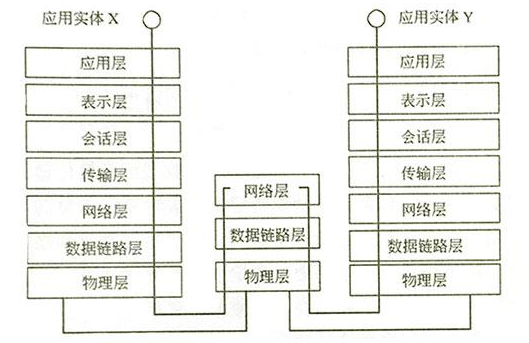
3.1 计算机网络模型 21
3.2 传输层协议简介 22
3.2.1 TCP协议 22
3.2.2 UDP协议 23
3.2.3 效率分析 23
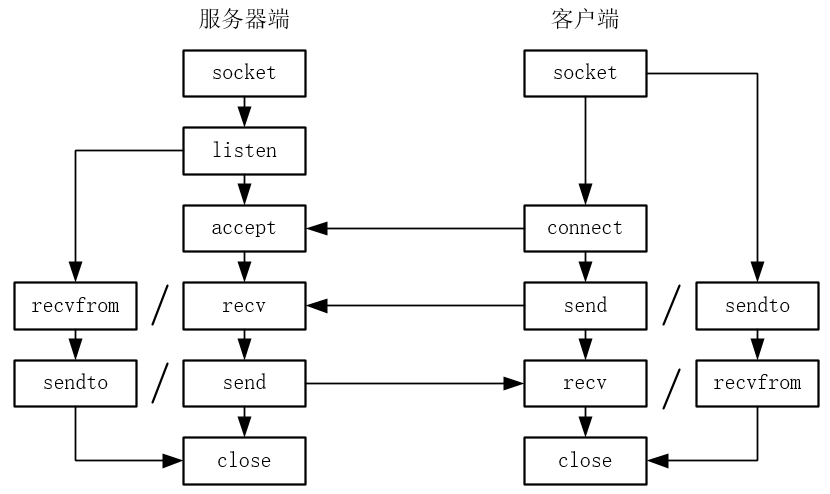
3.3 socket接口及相关函数 25
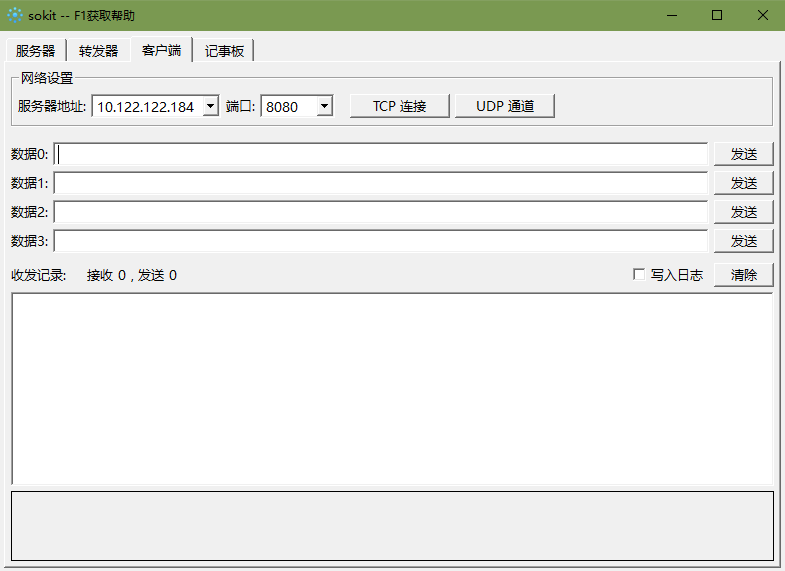
3.3 UDP协议调试助手及使用方法 27
第4章 UDP轻量级通信协议的设计优化 30
4.1 UDP轻量级协议实现 30
4.1.1 UDP通信协议概述 30
4.1.2 UDP协议数据包封装及规范 30
4.1.3 UDP协议具体实现步骤 31
4.2 UDP轻量级协议仿真实验方案 31
4.2.1 实验目的 31
4.2.2 实验内容 31
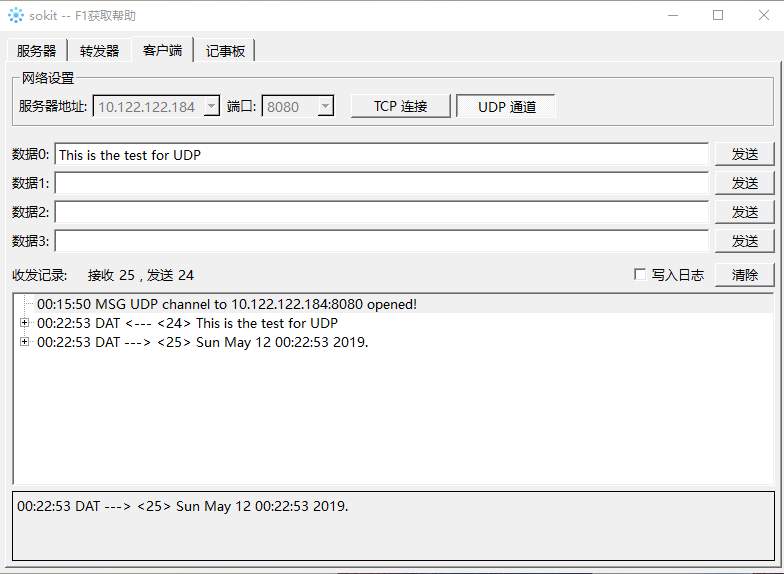
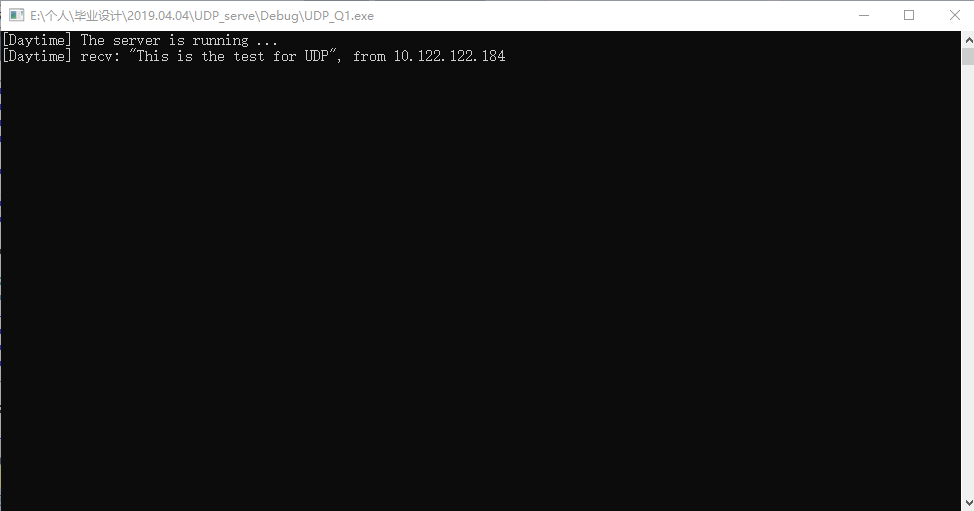
4.2.3 实验操作步骤 32
4.3 UDP轻量级通信实验结果 32
4.4 实验结果分析及总结 36
第5章 UDP轻量级协议在汽车上应用 38
5.1 车载硬件介绍 38
5.1.1 激光雷达简介 38
5.1.2 工控机简介 39
5.1.3 MicroAutoBox简介 39
5.2 UDP轻量级协议数据包设定方案 40
5.3 数据包设定方案对比分析 42
第6章 总结与展望 43
6.1 总结 43
6.2 展望 43
参考文献 45
附录 47
Ⅰ UDP协议客户端源代码 47
Ⅱ UDP协议服务器端源代码 50
致 谢 53
第1章 绪论
1.1 研究背景及意义
在传统汽车应用上,给人们带来美好生活的同时,也带来了汽车发动机排放污染物污染环境、汽车使用时的高能耗和安全三个方面的问题。汽车发动机燃烧排放的污染物已经是大气污染的主要来源,并且损害生态系统的运行和危害人体健康,例如有产生温室效应的二氧化碳气体、不完全燃烧产生的有害氧化物以及催化酸雨的氮氧化物。石油是汽车消耗的主要燃料,在汽车上的消耗量占世界石油消耗量的约50%。据世界银行统计的数据,每年约有117万人死于交通事故,驾乘人员的死亡率占35%,路上行人等其他道路使用者约占65%。汽车是一个复杂的机电一体化产品,将汽车这一传统的机械产品与机电系统相联系,能够使现代汽车的舒适性、动力性、操控性等指标得到大幅度提高。
近年以来,为了提高车辆行驶过程中的稳定性、安全性,高效率的利用车载信息和道路信息,从而减少尾气排放,降低尾气污染,使得智能交通系统ITS(Intelligent Transport System)被各实验室开始研究,推动了智能交通系统ITS技术的发展。智能交通系统ITS是包括只能控制、信号感知和动态识别等技术,通过主动操纵车辆,从而实现更为安全、高效的驾驶过程。
自动驾驶汽车,即智能车辆,一般也被叫做轮式移动机器人,在智能交通系统ITS中起着重要作用。智能汽车是包括环境感知、车路协同、路径规划和运动控制在内的智能体,其已经是一个复杂的机电控制系统,涵盖机械、电子、控制、计算机、运动学和动力学在内的多个学科领域。在环境感知模块中,主要作用包括了车辆识别、路人识别、车道线识别、信号灯识别、交通标识识别和停车位识别等关键问题。主要借助于毫米波雷达、摄像机、超声波雷达、激光雷达等传感器采集环境数据信息及相关数学算法,再经过图像识别技术、图像降噪技术、点云处理、三维重构、几何建模和信号接收几个步骤,从而识别出车道线、斑马线、汽车周围的行人和红绿灯信号等环境信息。在车路协同模块中,一共有感知层、网络层和应用层三个层次。在感知层中,借助公路上的电子摄像头进行视频检测;测速雷达等路基雷达设施进行雷达检测;车辆与车辆之间的信息共享;未来发展的智慧城市作为路基设施也可以在感知层中提供大量信息。在网络层中,应用3G网络、4G网络或5G网络实现通信。在应用层上,就可以实现智能交通、停车辅助和路口规划等功能。
众所周知,在应用大量传感器时,需要将传感器采集到的信息传输到工控机中,目前可用的数据传输有无线传输和有线传输两种通讯方式,其中有线的通讯方式又可以分为并行通信方式,串行通信方式和计算机网络通信三种方式。无线信息传输可以借助蓝牙、蜂窝网络、红外数据传输等进行通信。无线传感器网络正日益融入现代汽车,以提高安全性和降低成本[1]。汽车的应用环境及其复杂,尤其是军方车辆,常常需要在极寒和极热工况下稳定行驶,有线通信常常都难以保证稳定工作,无线通信则更加难以保证。目前,汽车上多采用低成本、高性能和可靠性高的CAN(Controller Area Network)总线串行通信协议。其物理层通信介质一般是同轴电缆、光导纤维或者双绞线网线,一般情况下,最高的通信速率能够达到1Mbps。
汽车在过去通常将负载设备和电子控制单元连接起来,即点对点的通信方式。当电子设备增多时,用于数据传输的线束也增多,给汽车线束的空间布置带来了巨大困难,同时导线的数量和质量增加,给汽车带来了额外的燃油消耗。现在汽车通常采用基于总线的网络结构,减少了车载线束,降低成本,提高了电子设备工作的可靠性。目前,已经发展了多种汽车网络标准,各种汽车网络标准都有其突出的优势功能。SAE世界汽车工程学会中的车辆网络委员会为了使汽车数据传输网便于研究和设计应用,将其分为A、B、C三类[2]。
自动驾驶汽车的环境感知模块通常布置有大量传感器,传感器采集的数据之间也有冗余,以防止单个传感器发生故障时,其他传感器的组合而采集的环境数据可以代替故障传感器未能采集到的环境数据。Boss无人车的环境感知模块有两个摄像头,九个超声波雷达和两个激光雷达;Junior无人车的两边各装有一个激光雷达,同时分别在车顶处、尾部和保险杠处并装两个激光雷达,车辆的具体地理位置信息依靠车辆与卫星的通信感知,通过融合多个激光雷达采集的数据,将车辆周围的路况信息生成3D模型;Talos无人车的环境感知由7个传感器组成,其中车前有3个,车后有4个。谷歌无人车的环境感知模块的传感器组成有激光雷达、毫米波雷达和红外线相机等。
以太网网络的最大带宽目前已经达到千兆以上的速度,而汽车上传统通信协议的软件开销限制了网络通信的最大速度,是千兆及以上网络通信带宽的主要瓶颈。
各传感器采集的数据通过线束传递至工控机上,当数据量过大时,产生的最主要问题在于数据延时,数据异常等问题。自动驾驶汽车高速行驶时,由于数据延时而导致工控机采集到的传感器数据出错,重构出的汽车周围的3D环境也不准确,进而可能导致重大交通事故,其结果不可想象而且在伦理上不能被接受。轻量级通信的主要目的是为了降低通信延时,同时包含更大的网络吞吐量。轻量级通信的实现主要是通过零拷贝通信机制实现的。以太网具有普及率高,简单,快速和价格较低等特点,在对通信延时要求就低的情况下,常常选择以太网作为线程总线。并且,随着以太网技术的发展,共享式以太网也逐渐被交换式以太网替代称为分布式实时系统的主要网络拓扑。
1.2 国内外研究现状
1.2.1 自动驾驶汽车国内外研究现状
1886年,自第一辆汽车出现以来,极大的改变了人们的生活方式,但是我们并不满足于此,在早年便提出了自动驾驶汽车的构想,并将其写进科幻小说。从虚构的科幻小说转为科学研究再到工业生产,包括一些实现部分自动驾驶功能(比如:自适应巡航控制、车道保持系统和紧急制动等)的量产系统,自动驾驶技术发展时间已经有100年了。美国佛罗里达州交通管理局指出[3]:自动驾驶技术是指安装在车辆上,在人力因素不主动操纵或监控车辆的情况下,实现车辆自动驾驶的技术。21世纪以来,物联网、人工智能、大数据计算、互联网和智能控制等技术的有了快速的发展,自动驾驶汽车技术得到完善,完全实现的趋势也越来越明显。目前,自动驾驶技术的研究和实验在欧美国家、日本以及我国的新兴的科技公司和汽车厂商中被大力推进。
2010年,VIAC自动驾驶汽车的挑战被欧洲意大利的帕尔马大学Vislab实验室发起。2010年7月20日,Vislab实验室组织车队从帕尔马出发,其中四辆车上装有GPS和GOLD障碍物和车道侦测系统,在一些路面上,这四辆车可以实现自动驾驶功能,车队在行驶了1.3万公里后,10月28日抵达上海。通过这一件事,让广大人民群众,尤其是车迷开始意识到了汽车行业的内涵和外延正在被自动驾驶技术改变。
汽车数字化的高速发展让汽车发生了较大变革,曾将有人说汽车是“时速高达113千米的高性能计算机”。传统汽车企业在自动驾驶汽车的研发上投入巨额资金,而汽车工业的外围玩家,比如谷歌、苹果和优步等,在自动驾驶技术和无人车的研发上也是不遗余力。
网络、传感器、人工智能和通信技术在过去20年的快速发展,使得数字化工具逐渐改变人们的社交、学习和生活方式。与此同时,传统汽车也从接受信息为主转变为了采集信息的一方。在自动驾驶汽车的车身外部,一般都安装的毫米波雷达、激光雷达、摄像头和其他传感器采集车身周围的环境信息;在车内,一些驾驶辅助系统监测驾驶员的身体状况,尤其是驾驶疲劳程度,驾驶员的压力指数也可以被皮肤静电传感器采集。
目前而言,传统车企和科技公司是从事无人驾驶汽车技术研发的两大阵营。以谷歌、苹果为代表的科技公司和以奔驰、沃尔沃、宝马为代表的传统车企,在无人驾驶汽车技术研发的技术方案和技术路线上有较大的分歧,从目前来看两大阵营之间的合作少于竞争。从实现无人驾驶汽车技术的技术路线的角度来看,科技公司计划依靠自身强大的科技实力,希望在软件开发、人工智能、大数据处理、高精度数字地图绘制等领域取得进一步突破,同时科技公司研究领域多元化并且有聚集全球人才的机会,也可以推动他们的计划进一步实施,实现无人驾驶汽车技术的跨越式发展。传统的车企选择了一条渐进式发展路线,他们多年来在汽车工业的生产制造技术上有很多的技术经验积累,希望通过对已经比较成熟的驾驶辅助系统改进和完善,最终实现完全意义上的无人驾驶汽车
1998年成立于美国硅谷的谷歌公司,因开发了搜索引擎Google闻名于世。公司高层将无人驾驶汽车的发展看作是未来的必然趋势,其无人车研发项目在2007年被秘密启动,是世界上第一个开始无人驾驶汽车研发的公司。目前为止,谷歌在无人驾驶汽车技术研究项目上取得的成果是其他公司无法比拟的。
2003年在美国硅谷成立的特斯拉汽车公司(Tesla Motors Inc.)将IT理念应用到生产汽车上,与传统的汽车生产厂商所采用的思路不一样,也和谷歌公司所采用一站到位式的技术方案不同。特斯拉的自动驾驶汽车从研究驾驶辅助和辅助驾驶系统开始,主要着手于以视觉为主的低成本的技术方案也成为了自动驾驶汽车发展的主流路线之一。基于视觉的定位与人的工作方式比较近似。依靠路面上的交通标识估测汽车的位置,再根据路面上线条的变化做出实时决策。采用视觉地图,从视觉中提取标志和线条,再应用相关算法,生成数字地图,车辆在数字地图中的具体位置根据视觉匹配的方法而获得。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: