动态三维船舶领域浅析毕业论文
2020-02-15 22:10:33
摘 要
随着航运业的快速发展,海上交通运输日趋繁盛,随之而来的是在大部分水域船舶数量、吨位和航速的增加,这导致船舶的航行风险越来越大,船舶交通管理的难度也越来越大。因此如何对船舶水上交通进行更科学有效的管理成为一个问题,而构建一个科学合理的船舶领域模型就是解决这个问题的一个很好的切入点。
很多不确定因素包括人、船、环境、管理等都会影响到船舶领域,这些因素给构建一个科学的船舶领域模型带来了困难。本文结合对船舶领域模型结构方面的研究和对智能算法的学习,针对“船—环境—管理”大系统中影响船舶领域的各个因素,通过输入船舶自身的动态、静态以及所处的交通环境信息,运用BP神经网络建立了一种动态三维船舶领域模型,并通过实例计算验算构建完成的船舶领域模型。
关键词:动态 船舶领域 BP神经网络
Ⅰ
Abstract
With the rapid development of the shipping industry, maritime transportation is becoming increasingly prosperous, which is followed by the increase in the number, tonnage and speed of ships in most water areas. As a result, the navigation risk of ships is becoming greater and greater, and the difficulty of vessel traffic management is also becoming greater and greater. Therefore, how to manage ship traffic more scientifically and effectively becomes a problem, and building a scientific and reasonable ship domain model is a good starting point to solve this problem.
Many uncertain factors, including people, ship, environment and management, will affect the ship field. These factors bring difficulties to the construction of a scientific ship field model. Based on ship model structure in the field of research and study of intelligent algorithm, according to "ship - environment - management" major influence factors in the field of ship in the system, through the input of ship's own dynamic, static, and the traffic environment information, using the BP neural network to establish a dynamic three-dimensional ship domain model, and through the calculation of calculation of the build complete domain model of the ship.
Key Words: dynamic Three-dimensional ship field Back-Propagation neural network
Ⅱ
目录
第1章 绪论 1
1.1研究背景 1
1.2研究的目的及意义 1
1.3国内外研究现状 2
1.3.1基于统计方法的船舶领域研究现状 2
1.3.2 基于解析领域的船舶领域研究现状 2
1.3.3 基于智能算法的船舶领域研究现状 3
1.4研究内容及技术方案 3
1.4.1论文主要内容 3
1.4.2研究技术路线 4
第2章 动态三维船舶领域构建 6
2.1 水平方向面船舶领域模型构建 6
2.2 水平面以下方向船舶领域模型构建 12
第3章 三维船舶领域实例计算 16
3.1 三维船舶领域之水平面实例计算 16
3.2 三维船舶领域之垂直方向面实例计算 18
第4章 结论与展望 21
4.1 结论 21
4.2 展望 21
参考文献 22
致谢 23
第1章 绪论
1.1研究背景
海洋工程装备及高技术船舶是中国制造2025中不可缺少的一部分,海上智能航行作为其中非常关键的一环,实现水上水上智能航行作为关键发展方向,就需要对组成水上交通系统的船舶行为进行研究。其中,自提出到现在已有50多年的船舶领域理论有助于研究船舶行为和船舶交通。随着航运业的发展,船舶逐渐快速化、大型化,船舶交通管理的难度也越来越大。有数据[1]显示:2018年我国共发生一般等级及以上中国籍运输船舶水上交通事故176件,同比下降10.2%;死亡失踪237人,同比上升24.7%;沉船83艘,同比上升3.8%;直接经济损失2.9亿元,同比上升5.5%。在水上交通事故频发的现在,如何更好的进行船舶交通管理已经成为了一个问题。面对这个问题,传统的二维船舶领域模型已经不再适应现状了,而动态三维船舶领域不仅可以实时根据船舶所处的环境和操作生成每一时刻的船舶领域,而且兼顾水平方向和垂直方向,有助于更好地规划航行路径及保障船舶航行安全。
1.2研究的目的及意义
目前,关于船舶领域模型的研究一直是国内外学者研究的重难点问题,分析其原因发现主要体现在以下三个方面:
(1)有多种不确定因素会影响到船舶领域,包括船舶驾驶员、船舶本身(包括船长、船速、船舶类型)、自然环境(包括能见度、风级、浪级)、船舶周边交通环境等因素,用一般的建模方法是没有办法对这些因素进行描述的;
(2)现有的研究方法主要还是采用统计和聚类分析的方法,通过海上观测、航海模拟器、对船舶驾驶员问卷调查和使用船舶自动识别系统等来获取建模数据并进行处理,这些研究方法不仅增加了影响船舶领域因素的不确定性,而且使所建的模型不能很好地反映与影响因素的内在本质联系;
(3)随着航运科技的快速发展,LNG(液化天然气)、LPG(液化石油气)等特种船舶的数量逐年增加,加上海上养殖面积的扩大,使得一些水域的交通密度增大,干扰船舶航行的安全因素不断增加,因此运用传统的方法建立船舶领域模型的难度也越来越大。
以往的船舶领域模型大多是二维模型,针对的是水平方向船舶避碰的需要,这有着很大的局限性,并没有考虑在内河及港区航行时船舶避免搁浅的需要。本文拟本文借鉴藤井、Goodwin、徐周华等人建立船舶领域模型的思路,从水平方向和垂直方向分别建立船舶领域模型,再将两方向结合构建三维动态船舶领域模型。通过对船舶领域模型结构的研究和智能算法的学习能力,针对“船—环境—人”这个系统中影响船舶领域各因素的特性,通过输入船舶航速、吃水、船舶航行区域、船舶类型、船舶载重吨、能见度、风级等船舶动静态数据和交通环境信息,构建动态三维船舶领域模型,能够兼顾水平方向面和垂直方向面,使船舶交通管理更加安全可靠。
1.3国内外研究现状
1.3.1基于统计方法的船舶领域研究现状
在道路交通中,一条道路中行驶的车辆间为防止相撞总会保持一定的安全余地,这一距离的间隔与车辆本身的性能(包括车速、操纵性、尺度等)和驾驶员的反应能力密切相关。受道路交通的启发,日本学者藤井[2]于20世纪60年代在统计水道的交通容量时,提出了船舶领域的概念,类比于道路交通工程,海上或航道中行驶的船舶间也会保持相应的安全距离,即为船舶领域的大小,它是研究水上交通通行能力和船舶行为的重要依据,藤井在日本沿海水域建立的船舶领域大小为纵轴7倍船长和横轴3倍船长的椭圆形状。1971年,英国学者Goodwin[3]使用海上交通调查并回收数据的方式在北海南部水域对船舶领域进行研究,Goodwin用三个大小不等的扇形来模拟船舶领域的大小。藤井和Goodwin的研究奠定了船舶领域的基础。以藤井和Goodwin的研究为基础,英国学者Davis[4]针对Goodwin模型边界的不连续性,在此基础上,建立了平滑的圆形船舶领域模型。基于统计方法的船舶领域是通过海上交通观测调查、雷达模拟器实验和船舶自动识别系统获取数据,运用概率统计和聚类的方法,综合船舶本身的数据信息(包括船长、船宽、船速、航向等)以及船舶航行规则等,在所研究的水域确定了船舶领域的大小,建立航行水域内船舶领域模型。但这种方法具有非常明显的局限性,很多因素如人、环境、管理并没有加以考虑,也没有建立输入与输出间的函数关系。近年来多用航行信息更丰富的AIS数据进行统计方法的船舶领域研究。文元桥[5]通过使用船舶自动识别系统(AIS)数据选取目标船,再通过提取该目标船的周围船舶相对于目标船的运动轨迹进行拟合,从而求取目标船与周围船之间的最近距离,并以该最近距离确定目标船和周围最近船舶的相对位置分布,从而构建出船舶领域模型。
1.3.2 基于解析领域的船舶领域研究现状
1989年,贾传荧[6]认为在拥挤水域内船舶的领域尺寸不是固定不变的,其尺寸大小与船长、船宽、航速等有关,并通过建立它们之间的函数关系的方法建立了拥挤水域内的船舶领域模型。郭志新[7]通过考虑船舶转向性能和水动力学等因素,建立了特定的会遇情况下的船舶领域模型。徐周华[8]等通过对内河船舶操纵与避碰和内河航道的特点的研究,建立了三维内河水上船舶领域模型。陈厚忠、郭国平[9]通过研究内河并列跨河桥梁通航孔布置的特点以及桥区水域通过能力建立了桥区水域船舶领域模型。范贤华、谭志荣等[10]通过分析水流中首尾方向水流和均匀斜流对船舶领域的影响,从而改进原有的船舶领域模型。
基于解析领域的船舶领域通过将船舶航速、航向、吃水船舶动静态信息作为输入,运用船舶的运动学方程、船舶转向和减速模型求出船舶间的最小安全距离,从而确定船舶领域的尺寸大小,并建立起输入变量与输出船舶领域的尺寸之间的函数变化关系。基于解析领域的船舶领域模型使的领域边界是可以量化的,这种方式充分考虑了船舶本身的操纵性能,但忽略了人为因素在船舶领域模型中的作用。
1.3.3 基于智能算法的船舶领域研究现状
由于基于统计方法和基于解析领域的船舶领域研究都不能揭示人为因素与船舶领域之间的关系,于是许多学者开始将重心放在近些年来发展迅猛的智能技术上。
Zhu X[11]等提出运用神经网络对船舶领域模型进行训练学习。王宁[12-13]运用模糊理论提出了四元船舶领域模型,并包含了所有影响船舶领域的因素,加强了船舶领域在实际水域中的可应用性。Pietrzykowski[14]通过运用经验数据对人工神经网络进行训练学习,得到了船舶领域与两船间的相对方位、他船航向之间的关系,构建了相应的船舶领域模型。齐乐[15]通过AIS获取船舶船舶交通信息,并运用模糊理论结合传统的最近会遇距离(DCPA)、最小会遇时间(TCPA)建立了琼州海峡水域的船舶领域模型。向哲等[16]通过AIS搜集船舶信息,运用网格计算建立受限水域的船舶领域模型。周丹[17]分别利用主成分分析理论和粗糙集理论分别对影响船舶领域的因素进行分析,得出了在能见度良好的情况下各因素对船舶领域的重要性。这种基于智能算法的船舶领域模型还仅仅只是对船舶信息和经验数据进行简单的训练而得到的简易模型,远未发挥现代智能处理技术的优势。
1.4研究内容及技术方案
1.4.1论文主要内容
本篇论文一共分为四个章节,每章具体内容如下:
第一章阐述了论文研究背景、目的及意义,并对目前国内外关于船舶领域模型的研究现状进行具体说明,介绍了本文研究的主要内容和采取的技术路线。
第二章通过对目前船舶领域模型和人工智能算法的学习和研究,针对“船—环境—管理”大系统中影响船舶领域各因素的特性,通过输入船舶自身的动态、静态信息以及所处的交通环境信息,运用BP神经网络算法,建立一种动态三维船舶领域模型。
第三章搜集航速(speed)、吃水(draft)、船舶类型(type)、能见度(visibility)、风级(wind)、船长(LOA)等相关数据,将数据代入模型之中进行实例计算,验证模型的可行性。
第四章总结全文的研究内容及成果,并做出相关展望。
1.4.2研究技术路线
(1)查阅相关文献,了解本论题的国内外研究现状,形成对研究状况的整体把握。对matlab中BP神经网络建模进行学习,为后面建立三维动态船舶领域模型打好理论基础。
(2)将三维船舶领域分成水平方向船舶领域和垂直方向船舶领域两个方向开始进行建模,综合考虑影响水平方向船舶领域的船速、吃水、船舶类型、驾驶员技能、能见度、风级等因素,运用神经网络处理非线性问题的特点建立其领域模型;并将船舶吃水和富余水深作为船舶航行的最小安全水深,建立其水平面以下方向上的领域模型。通过输入船舶动静态及周围环境信息,自动生成动态三维船舶领域模型。
(3)通过实例来计算验证三维动态船舶领域模型,检查模型可行性。
本文的技术路线如图1-1所示:
图1-1 技术路线图
第2章 动态三维船舶领域构建
本文借鉴藤井、Goodwin、徐周华等人建立船舶领域模型的思路,将船舶领域看成是一个包容在长方体内的椭圆柱模型(如图2-1),三维船舶领域水平面之所以选择椭圆形,则是借鉴于藤井模型。其中椭圆柱的长轴长即为船舶领域的长度,椭圆柱的短轴长即为船舶领域的宽度,椭圆柱的高度即为船舶领域水面以下的深度,即航行船舶的最小安全水深。
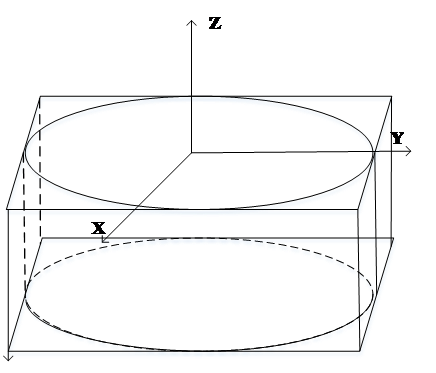
图2-1 三维船舶领域模型
由于影响船舶领域的因素众多,同一艘船舶在不同的自然条件、或不同的航行状态下,其领域大小会发生明显动态变化。例如:当船舶处于锚泊时,由于锚链的存在,故模型大小应该是一近似圆柱体;当船舶在能见度较低时,相对于能见度较高时,领域的竖轴和横轴都应相应增大。本文从水平面和水平面以下两个方向来构建三维船舶领域模型。
2.1 水平方向面船舶领域模型构建
根据前面建立的三维船舶领域模型可知,其水平面切面为一标准椭圆形状,如图2-2所示。
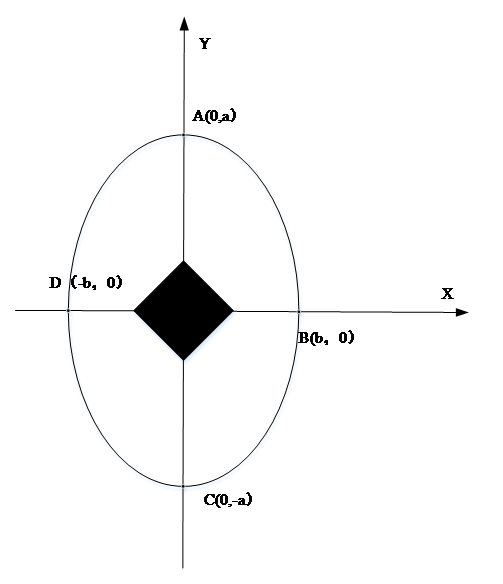
图2-2 三维模型之水平面模型
椭圆方程为:
(2.1)
A点是船舶领域与Y轴正方向交点,坐标(0,a);
C点是船舶领域与Y轴负方向交点,坐标(0,-a);
B点是船舶领域与X轴正方向交点,坐标(b,0);
D点是船舶领域与X轴负方向交点,坐标(-b,0);
根据图2-2,设定基准的船舶领域为:
(2.2)
其中q为“船舶领域之长轴系数”、p为“船舶领域之短轴系数”,LOA为船舶总长。
(1)模型影响因素分析
关于三维船舶领域之水平面建模,通过研究分析国内外学者关于此领域模型的思路,可将影响船舶领域的因素主要分为:通航环境因素、船舶自身因素和船舶管理因素三个方面。通航环境因素主要是指包括船舶密度、其他船舶的航速、船舶操纵是否收到通航环境的限制(如可供旋回的安全水域)、航道宽度、航标、碍航物情况、气象海况情况(如能见度、风力风向、海浪)等;船舶自身因素主要是指船舶类型、操纵性能,如航速、应舵时间、旋回性能等,其中最主要的是从当前速度降到速度为零的距离。船舶在宽阔水域航行,驾驶员采取的避碰措施一般首选大幅度的转向宽让,而在狭小且通航密度大的港口和内河水域,驾驶员一般会采取转向或减速,直至只采取把船停住的避碰措施;船舶管理的因素则主要是指航行规则、是否特别关注船舶等。
由于动态三维船舶领域模型,因此主要考虑以下三类因素:船舶当时所处的交通环境(能见度、风级、航行水域),船舶静态参数(船长、吃水、船舶类型)、船舶动态参数(航速)。
当船舶在大风和能见度不良的天气条件下航行时,其船舶领域范围应明显大于正常天气条件下的船舶领域,这样才能保障船舶的航行安全。
船舶的冲程主要取决于船舶动量大小,航行船舶的动量式为:
(2.3)
表示船舶的动量大小,表示船舶质量,表示船舶速度。
在其他条件保持不变的条件下,船舶总质量的大小可以反应在船舶吃水上,因此,对于船舶动量的大小我们主要考虑船舶速度以及船舶吃水两方面的因素。
危险品船舶、客船发生事故后的危害显然要大于普通船舶,为保障船舶的航行安全,危险品船舶和客船的领域范围一般也应大于普通船舶,因此,本文将船舶类型这一因素考虑到船舶领域的建模当中。
鉴于以上分析,本文所考虑的影响水平面上船舶领域大小的因素主要包括了航速(speed)、吃水(draft)、船舶类型(type)、能见度(visibility)、风级(wind)、船长(LOA)。根据船舶的船长、航速、吃水、船舶类型、能见度、风级的不同,长轴系数和短轴系数的取值不同。



