新加坡海峡船舶碰撞风险评估外文翻译资料
2022-11-05 11:33:53

英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
新加坡海峡船舶碰撞风险评估
摘要:新加坡海峡被认为是连接印度洋和太平洋航运路线上的瓶颈和堵塞。因此,船舶碰撞风险评估对于通过狭窄,浅水和繁忙航道的船舶具有重要意义。本文首先提出三个船舶碰撞风险指标,来定量评估海峡两岸船舶碰撞风险:速度分散指数,加速度和减速度,以及模糊船舶重叠数量。新加坡海峡的这三个风险指数是由劳埃德的MIU自动识别系统(AIS)提供的实时船舶位置和航行速度估算的。根据对这三个风险指标的估计,可以得出结论:4W,5W,11E,12E是海峡最危险的经度。因此,应该优先考虑在这四个经度上实施防撞风险降低的解决方案。 这项研究还发现,大约25%的船舶以超过限速的速度航行,这导致了
更大的船舶碰撞潜力。分析表明,如果所有船只遵循通过准则,安全水平将得到显着改善。
1、介绍
马六甲海峡和新加坡是世界上最重要的航运渠道之一。它是从印度洋到太平洋的最短航线,连接欧洲联盟,中东,印度,中国,日本,韩国等主要经济体系。然而,海峡不够深,以允许一些最大的船只(主要是油轮)的通过。 例如,在飞利浦渠道,它缩小了2.8公里,还有大洋航线的2.1公里,创造了世界的咽喉要道之一。因为海峡对全球经济至关重要,并且
代表着一个狭窄,不深,繁忙的航运枢纽,海峡航行的航海安全得到了海事当局(如新加坡海事局和港务局)等相关利益攸关方的高度关注 (例如托运人,承运人等)(Gilmartin,2008)。
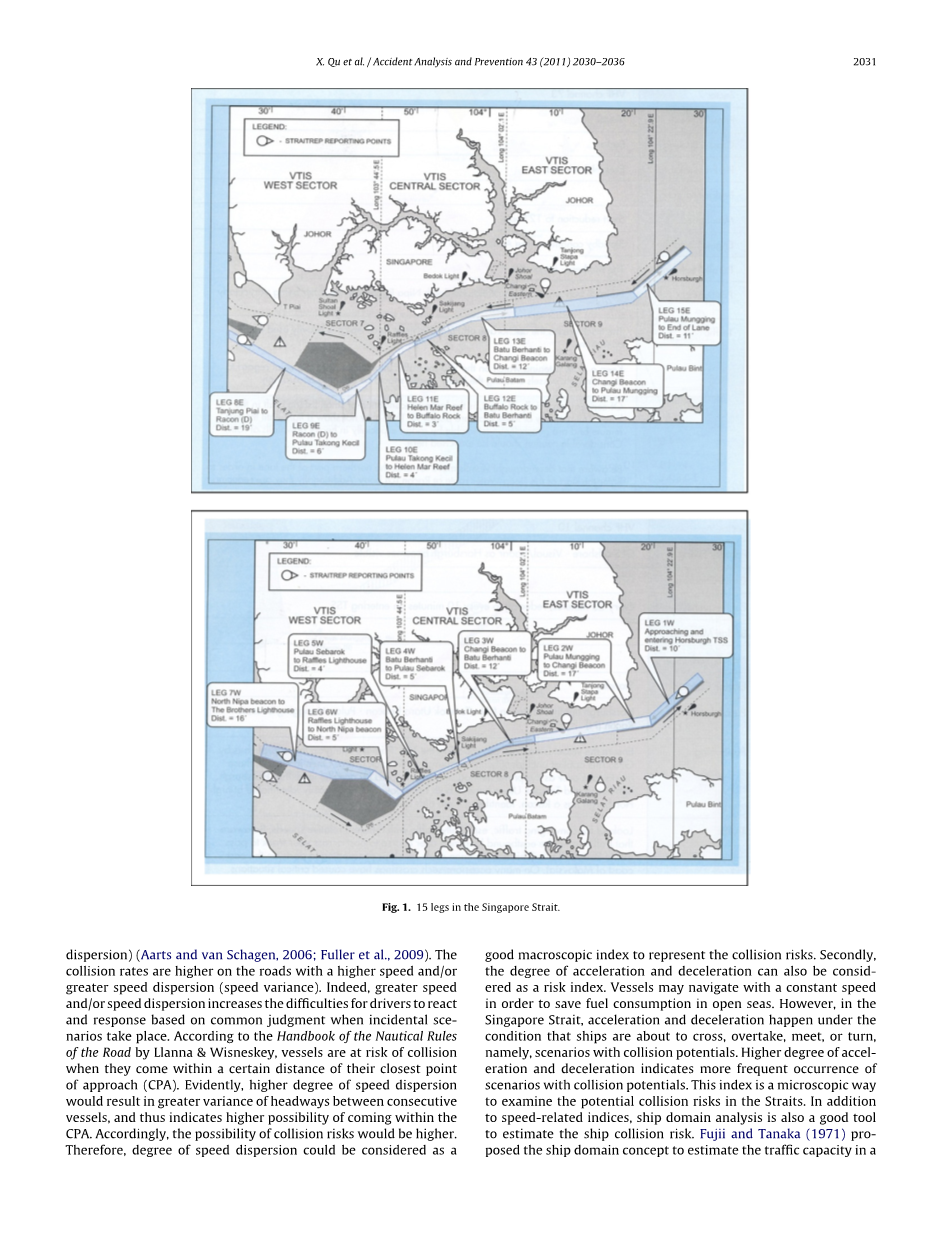
近三十年来,海峡两岸实行了多项管理和导航解决方案,以加强海峡两岸航行安全,如1981年5月1日以来的交通分离计划(TSS)。根据TSS,交通流量的相互交流已经被建立的交通车道分开。此外,国际海事组织(IMO)在1998年将海峡两岸强制海峡船只报告制度(STRAITREP)分为九个部门。根据该系统,第七到第九的部门受交通服务中心的新加披船舶的管辖,交通服务中心也被称为新加坡海峡,第一到第五部门和第六部门分别受Klang交通服务中心和Johor交通服务中心管辖。此外,1998年,国际燃气油船和码头运营商协会(SIGTTO)发布了第一版“马六甲和新加坡海峡规划指南”,包括海峡背景和通行说明,为船长和航行人员通过海峡提供指导。(SIGTTO,2008)。这段文字进一步将新加坡海峡分成15条航程,如图1所示,东行8个经度,西行7个经度。然而,推荐的导航规则(例如速度限制)从一个经度航行到另一个经度。这些规则是基于SIGTTO来自各个海洋组织经验丰富和知识渊博的岸上人员的船长进行的调查所得来的。
然而,上述风险降低的解决方案一般都是基于专家的定性和主观判断。目前还没有定量评估船舶在海峡中碰撞风险的研究。因此,重要的提出一个定量评估在新加坡海峡的碰撞风险的程序,来支持这些专家的判断。
可以采用车辆碰撞研究的两个速度相关的船舶碰撞风险指数作为评估新加坡海峡两岸船舶碰撞风险的指标。首先,可以应用绝对速度和/或速度分散来评估航运中的船舶碰撞风险。在道路运输中,开发了各种模型来反映碰撞速率和速度之间的关系(以绝对速度和/或速度分散的方式)(Aarts和van Schagen,2006; Fuller et al,2009)。道路上的碰撞率在较高速度和/或更大的速度色散(速度差异)较高。事实上,更大的速度和/或速度的分散增加了驾驶员在附带情况发生时基于共同判断的反应和响应的困难。根据Llanna&Wisneskey的“道路航海规则手册”,船只在距离最近的接近点(CPA)一定距离之内时,有碰撞的危险。显然,较高程度的速度分散将导致连续血管之间的距离变化较大,从而表明在CPA内进入更高的可能性。因此,碰撞风险的可能性将更高。因此,速度分散程度可以被认为是一个良好的宏观指标来代表碰撞风险。 其次,加速度和减速度也可以被认为是风险指数。船舶可以以恒定的速度导航,以节省公海的燃料消耗。 但是,在新加坡海峡,加速和减速发生在船只即将越过,超车,遇见或转弯的条件下,即具有碰撞潜力的场景。更高的加速度和减速度表明更频繁地发生具有碰撞潜力的场景。 该指标是微观检验海峡潜在碰撞风险的方法。除了速度相关指标外,船舶领域分析也是估算船舶碰撞风险的好工具。富士和田中(1971)提出了船舶领域概念来估算航运水路的交通能力。四年后,古德温(1975年)将船舶域定义为“船舶导航员要保留其他船舶或固定物体的周围有效水域”。从那时起,船舶领域已被应用于估计船舶的频率碰撞(Pietrzykowski,2008; Pietrzykowski和Uriasz,2009; Szlapczynski,2006; Wang,2010)。因此,海峡的船舶碰撞风险也可以使用船舶分析来评估。
为了对新加坡海峡进行定量的船舶碰撞风险评估,本研究采用劳埃德的MIU AIS船舶运动数据库(2009年7月)。具有超过四百万条记录的数据库在任何报告时刻提供了从2009年7月1日至7月31日从海峡通过的每艘船舶的MMSI(海上移动业务身份)号码,位置(纬度和经度),地面速度(SOG)和地面航向(COG)的唯一标识 (每1-10分钟)。应该指出的是,劳埃德的MIU被认为是近300年前海上数据的汇总。他们不仅从报告代理机构购买自动识别系统(AIS)报告(每天接收12000多份报告),还可以在海峡附近(古当,槟城码头等)的岸边安装接收机。AIS数据是用于船舶和船舶交通服务(VTS)的自动跟踪系统,通过与其他附近船舶和VTS站(例如新加坡VTS)电子交换数据来识别和定位船舶。系统可以自动将船只的位置和速度与船只MMSI一起传送到AIS数据仓库。 国际海事组织“海上人命安全国际公约”(SOLAS)要求,在总吨位(GT)为300吨以上的国际航行船舶上安装AIS,所有客船不管大小。
本研究的目的是提出一个定量评估新加坡海峡碰撞风险的程序。 因此,可以根据评估结果定量验证专家推荐的各种方法的导航规则。本研究采用三个风险指标:速度分散指数,加速度和减速度,以及船舶域重叠数。 在第2节中,介绍了劳埃德的MIU船舶运动数据库,并对这些记录进行了预处理,以消除噪音。其次是在第3节的海峡中的碰撞风险评估。结果和讨论在第4节和最后一节结束了研究。
2.实时船运记录预处理
报告时间和由Lloyd的MIU AIS船提供的船舶识别运动数据库非常可靠。然而,AIS位置和速度数据对于在收集端,发送端或接收端发生的错误并不是不成立的。例如,新加坡海峡是西北马六甲海峡与东部南海之间长达105公里的海峡。国际水文组织界定了新西兰海峡西部的经度为103°21°E,东部为104°35°E。但是,0.18%的记录超出这一范围,下降到115°E至178°E,这是明显不准确的记录。另外,海峡两岸大部分的速度限制是12节,船只不可能以超过35节的速度航行。然而,0.25%的记录速度超过50节。因此,我们需要一个预处理程序来清理数据。
2.1、数据清理
这些噪音将对新加坡海峡的碰撞风险评估产生重大影响。鉴于实时数据的完整性,删除这些记录是不合适的。然后,我们提出一个数据清理程序来消除噪音并更新这些不准确的记录。 根据牛顿运动定律,平均速度可以计算为行程距离和行驶时间的比率。 因此,船舶的位置记录和加速/减速能力可用于检查速度记录是否在合理范围内。 相应地,可以基于相同的原理使用更新的速度数据来清理位置数据。 数据预处理详细说明如下。
步骤1:检查速度数据的合理性。
我在一个特定船只的时间平均速度具体时间间隔[Tj,Tj 1]可以估计
其中xi,Tj是时间Tj(小时)的船舶i的经度坐标(秒); yi,Tj是时间Tj(小时)的船舶i的纬度坐标(秒)。 请注意,协调员按照结点的单位(秒/小时)计算。
根据牛顿运动定律,时间平均速度应满足以下条件:
其中SOGi,Tj是时间Tj(小时)时船舶i的地面速度(结); di和ai分别是船舶i的最大减速和加速度。
步骤2:更新非理性速度数据。
通过使用上述速度验证程序,0.34%的速度记录超出了方程式所示的范围。(2)时间Tj与船只i相关的点SOG根据公式更新:
步骤3:检查位置数据的合理性。
根据类似的程序,我们可以用纬度和经度来计算位置。
其中xisin;i,Tj是在时间Tj(小时)的船舶i的估计经度坐标(秒); y i,T j是船舶i在时间Tj(小时)的纬度坐标(秒)。估计坐标应满足下列公式。
步骤4:更新位置数据。
根据上述预处理程序,通过使用估计坐标值和报告坐标值(悲观风险评估)来更新0.1%的记录。
3.新加坡海峡船舶碰撞风险评估
3.1、速度分析
根据更新的船舶运输记录,海峡的船舶速度被评估为相对较低,除了仅有3.18%的记录反映速度超过25海里。 可能的解释可能是,海峡大部分地区的速度限制是12节。 因此,与速度分散相反,绝对速度可能不符合可靠的风险指标。 根据与几位经验丰富的船长的磋商和讨论,我们得出结论,船舶之间的差距越大,碰撞风险越高。
速度色散估计过程如下。 首先,我们给出一个船舶定位程序,根据他们的位置记录将这些记录分组成15组(关于15个经度的记录)。在下文中,我们计算通过经度的船只的平均速度。第三,可以计算每个经度的速度分散。
船舶定位是识别船在哪个航行导航。在此步骤中,我们首先识别每条船的顶点和边缘。例如,如图1所示。2,在7W中有5个顶点和5个边。所有的经度和纬度坐标顶点总结在表1中。
然后进行检查(逐一记录)船舶在某些时间是基于以下方法。令x和y表示各种记录的经度和纬度坐标。那么如果检查记录落在Leg 7W中,则x和y应满足以下等式。
通过逐一检查记录,我们将所有记录分为15个类别。对于每个组(经度的记录),我们进一步对船名的记录进行分组,并通过以下方式计算船舶i(macr;ui)的时间平均速度。
其中xTi和yTi是船舶i在时间T的经度和纬度坐标; Ti,max和Ti,min是本经度(集团)船舶i的最大(最新)和最小(最早)时间。应该指出的是,所有不动的船只(低于0.1节的船只)不在交通水道,而是在航道(港口区)。因此,这些不动船不会影响航道的碰撞风险。在获得各个经度的所有船舶的时间平均速度之后,可以相应地计算各种船舶的速度分散。
该指标是各种各样的碰撞风险的宏观风险指标。所有更新的船舶移动记录都被并入以表示碰撞风险的相对度量。根据船长的专家判断,较大的速度差异表明较高的船舶碰撞可能性。
3.2、减速加速分析
船只以恒定的速度航行,以节省公海的燃油消耗。加速和减速发生在船只即将穿越,超车,遇见或转弯的情况下,即具有碰撞潜力的情况。因此,加速度和减速度可以被认为是碰撞风险指数。
为了计算程度,我们还将首先根据位置和船只的MMSI数字对记录进行分组。 在步骤2中,我们计算船舶连续记录的加速度和减速度。
其中ak,i,Tj是在时间Tj-1的Leg k中的船i的加速度或减速度; SOGk,i,T是在时刻T的Leg k中船I的地面速度。在本研究中,我们将加速度和/或减速度的平方值的平均值作为另一个碰撞风险指数。
其中macr;Ak是加速度和减速度的程度; Ji,k是Leg k中船I的记录数。
该指标可视为微观检验海峡潜在船舶碰撞风险的方法。应该指出,在某些情况下,小的速度变化和/或平缓的加速和减速也可能与高船碰撞潜力相关。这是因为不仅地面速度(SOG),而且地面(COG)也对碰撞风险产生了重大影响(Macduff,1974; Kaneko,2002)。 例如,渡轮通过海峡,以非常高的速度垂直于航道(平均25节)导航,可能会严重干扰船上的船只。在风险评估中应考虑到这些船舶的影响。因此,我们应用了船舶域名的概念,不仅要考虑SOG,还要考虑COG。
3.3、船舶领域分析
3.3.1、船舶领域和碰撞风险
船舶领域的概念在船舶的航行安全中起着至关重要的作用。古德温(1975年)对船舶领域的一个众所周知的定义被描述为“船舶导航员要保持清除其他船舶或固定物体的周围有效水域”。研究人员(Fujii and Tanaka,1971; Goodwin,1975; Davis et al。1982年)。图3说明了富士船舶领域和古德温船舶领域。
船舶领域在海峡等限制水域特别有用(Pietrzykowski,2008)。 船舶域的经典定义将船舶周围的水域分为两个区域:危险(船内域)和安全(船外域外)。 如在赵等人中提到 (1993),Pietrzykowski(2008)和Wang(2010),人类往往将船舶周围的区域区分为二元判断更具描述性。根据船舶的距离,被称为模糊船舶领域,被用于评估限制水域的碰撞风险,水域可能被描述为非常安全,安全,不安全,危险,非常危险(Pietrzykowski,2008; Wang,2010)。 由于船舶领域是指导航员想要清除其他船舶的水域,船舶领域的重叠表明船舶碰撞的可能性较大。显然,在一个特定的经度上发生的船舶域重叠情况越多,该经度就越危险。
3.3.2、模糊四元数船域
王(2010)提出了统一的模糊四元数船域(FQSD)。
其中使用可能性值risin;(0,1)来确定FQSD的模糊边界(半径值); R(r),Raft(r),Rstarb(r)和Rport(r)分别表示前半径,后半径,右舷侧半径和端口侧半径; k是FQSD的形状指数。从定义来看,r值越高,对应的模糊船舶域就越小。
3.3.3、基于模糊船舶域的船舶碰撞风险评估
船舶域重叠的数量用于表示基于船舶域的碰撞风险。船舶分析中不仅考虑SOG,还考虑COG。船舶重叠场景估算程序总结如下。
首先,我们应该在检查时间Tj估计所有船只的位置和速度。由于这些船只可能需要30-60分钟通过某一经度,所以我们确定系统将每小时检查两次(每天48次)。我们
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[139975],资料为PDF文档或Word文档,PDF文档可免费转换为Word



