基于模糊控制的船舶避碰方法分析与研究毕业论文
2020-03-03 10:04:14
摘 要
随着世界经济的迅速增长,各国之间贸易的往来变得越来越频繁,尤其是海上运输行业得到了空前未有的快速的发展。然而,船舶间的碰撞问题也随着日益加深,各国都在寻找着各种方法和途径来解决这个问题。
本文首先通过分析现在较为常用的船舶避碰的几种控制方法,分析其优缺点,而后具体的分析了船舶的碰撞的过程,以及避碰的原理,然后通过船舶的危险度参数最近会遇距离(DCPA)和会遇时间(TCPA)的数学模型,给出了预防碰撞的对策。
接着简述了模糊控制的原理和其基本结构,通过船舶航行的特点,探讨了船舶避碰的模糊性,并对碰撞危险度要素进行决择,同时确定各个参数的隶属度函数,探讨了基于模糊理论的船舶碰撞危险度模型,并在MATLAB进行了仿真,在一些典型的工况下对避碰模型进行了分析和评价。
关键词:模糊控制 船舶避碰 MATLAB仿真
Abstract
With the rapid growth of the world economy, the trade between countries has become more and more frequent. In particular, the maritime transport industry has achieved unprecedented rapid development. However, the problem of collisions between ships has also deepened. Countries are looking for ways and means to solve this problem.
This article firstly analyzes the advantages and disadvantages of some common methods of collision avoidance for ships, and then analyzes the collision process of the ship and the principle of collision avoidance, and then passes the danger parameter of the ship to the nearest encounter distance. The mathematical model of (DCPA) and meeting time (TCPA) gives countermeasures against collisions.
Then, the principle of fuzzy control and its basic structure are briefly described. Through the characteristics of ship navigation, the ambiguity of ship collision avoidance is discussed, and the selection of collision risk factors is performed. The membership function of each parameter is determined at the same time. Fuzzy theoretical ship collision risk model was simulated in MATLAB, and the collision avoidance model was analyzed and evaluated under some typical working conditions.
Key words: fuzzy control ship collision avoidance MATLAB simulation
目录
第1章 绪论 1
1.1 概述 1
1.1.1 研究背景 1
1.1.2 研究的目的及意义 1
1.2 研究现状 2
1.2.1 船舶智能化避碰研究现状 2
1.2.2 模糊控制的研究现状 5
1.3 本文研究的主要内容 6
第2章 船舶避碰原理 8
2.1 船舶碰撞的原因 8
2.2 船舶避碰的相关知识 8
2.2.1 船舶避碰过程 8
2.2.2 船舶会遇态势 8
2.2.3 会遇参数的确定 9
2.2.4 船舶避让责任 11
2.2.5 船舶避让决策 12
2.3 本章小结 14
第3章 模糊控制理论 15
3.1 模糊控制的概况及理论基础 15
3.2 模糊控制系统 15
3.3 模糊控制器的结构 16
3.4 模糊控制系统的基本原理 17
3.4.1 模糊化运算 17
3.4.2 清晰化运算 18
3.4.3 模糊规则库 19
3.4.4 模糊推理 19
3.5 本章小结 20
第4章 模糊控制在船舶避碰系统中的应用 21
4.1 船舶危险指标的模糊特性 21
4.2 船舶避碰模糊系统设计 21
4.2.1 模糊控制器的设计方法 21
4.3 本章小结 24
第5章 仿真研究与评价 25
5.1 仿真软件简介 25
5.2 模糊控制系统仿真研究 25
5.3 典型工况下的应用分析 32
5.4 本章小结 33
第6章 采用带参数的隶属函数判定碰撞危险度 34
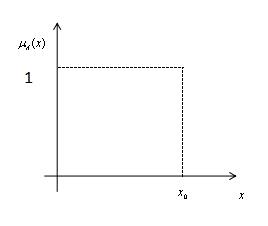
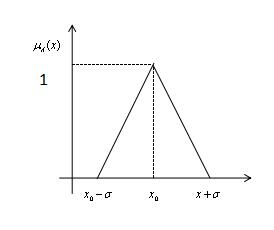
6.1 碰撞危险隶属函数 34
6.2 危险度判定与避碰综合决策 35
6.3 模型应用 36
6.4 本章小结 38
第7章 总结与展望 40
7.1 经济性分析 40
7.2 环保性分析 40
7.3 论文总结 40
7.4 研究展望 40
参考文献 42
致谢 44
第1章 绪论
1.1 概述
1.1.1 研究背景
众所周知,船舶是年代最为久远,同时也是当代最为重要的交通工具之一,它的出现为人类的经济发展以及社会的进步都作出了不可估量的作用。
船舶之间的碰撞是影响船舶正常航行的一个重要因素,如何避免船舶的碰撞也一直是海运界十分关注的问题。船舶在航行时经常会遇到如碰撞和搁浅等一系列的无法预料的事件,而且,特别是对于一些会引起海洋污染或者空气污染等事故发生时船舶,如化学船、核动力船等,那么引起的经济损失以及人生安全都会更加严重。
在过去的几十年里,全球的海运量正在不断地增长,而且势头也相当的迅猛,船舶的数量也在不断地扩大,并且都是一些万吨级以上的船舶,更是给其实就不容乐观的海上运输局势雪上加霜。例如在2018年1月,一艘船名为“桑吉”的巴拿马籍油船与船名为“长峰水晶”香港籍散货船在位于长江口以东大概160海里的地方不幸产生碰撞。“长峰水晶”轮部分设施被毁坏,船舶上的21名水手弃船逃生,幸好随后被中国渔船安全地救了上来。“桑吉”轮则严重的多,全船都被大火团团围住,连工作人员也失去了联系。“桑吉”轮大概装载有136000吨凝析油,因为碰撞,开始泄漏不止,最后造成了燃烧爆炸。事故共导致总共3人死亡、29名船员失去了联系。从统计来看,在所有导致船舶的不幸事故的缘由来看,比例最高的就是船舶碰撞,并且通过对事故原因进一步探讨能够明显的发觉,由于操作人员的操作不当等人为因素导致的交通事故占绝大多数。
由此可见,如何避免人为不必要的失误是减少船舶碰撞事故发生的一个重要的环节。船舶的海上避碰问题已经成为了航海安全急于解决的问题了。
1.1.2 研究的目的及意义
本课题通过对模糊控制学习,了解模糊控制理论的实际意义,并通过相关的算法,对船舶避碰模型进行简化处理,并在典型工况下对避碰模型进行验证与评价。
总的来说,对模糊控制在船舶避碰系统的应用进行探讨具有以下3个重要意义:
- 船舶航行智能化研究是目前船舶自动化发展的重要环节,然而从和它相关一系列研究来看,避碰系统的研究还没有很成熟,存在着许多不如意的地方,
是恰恰又是这一环节与船舶事业的发展密不可分,所以研究实现船舶避碰的智能化和开发船舶智能避碰就显得相当重要。
2) 航海工作人员都在想方设法来如何避免船舶事故的不断发生,尤其是最常发生的各船的碰撞事故。为了有效的解决这个问题,降低事故的发生概率,航海界统一制定了一系列航海规则,包括如通过加强船员教育,提高其工作的能力,以及对船舶的管理更加的专业严格等措施。那些在船舶上装备的仪器工具,尽管功能已经相当的强大,但是总的来说,也只不过起着辅助的功能,人才是能否解决航海碰撞问题的关键因素以及决定性因素,而正是通过航海专家和有经验的船舶操作人员的航海经验,船舶智能避碰系统能为工作人员提供参考性的建议,有利于做出正确的抉择。
3) 可以有效减少运输成本,以及船舶行驶安全性提高。就目前的情况,驾驶员主要还是依靠经验,智能化系统的研究可以很好地减少船舶驾驶员的工作压力,这样就可以无需聘用多余的工作人员,自然而然可以减少人力成本,从而减少开支,增加利润。
1.2 研究现状
1.2.1 船舶智能化避碰研究现状
近年来,船舶智能避碰系统得到了不断地发展,早在80年代的时候,日本东京商船大学已经开始致力于将专家系统运用于智能避碰系统的研究工作,但该系统未能考虑《海上避碰规则》,后来通过进一步研究,英国利物浦科技大学也提出避碰专家系统,但该系统只能在简单的会遇局势有较好的效果,一旦遇到相对复杂的状态下如多船会遇的情况,不能给出的唯一解决方法。随着海上运输业的不断发展,避碰环境也变得不再简单,在九十年代以后,智能算法的研究取得了相当巨大的进步,智能控制中的模糊控制,神经网络控制以及让人工势场等都被运用于船舶航行海上避碰都取得了较大的成果,相对于国外,对于船舶智能避碰系统的研究,国内的研究起步较晚,直到20世纪九十年代,我国的一些航海类高校以及相应科研机构才开始了对这方面的开发探索,例如广州海军学院研究的船舶避碰专家系统也是一种咨询系统,但在碰撞风险方面却较少考虑。对于会遇局势的划分还不够精细,后来,随着国外专家对智能算法的进一步的研究和探索,国内学者也通过借鉴与创新,结合实际,不断提出了各种形式船舶避碰系统,但是总的来说,研究成果还没能够达到实际运用的要求。对于智能控制在船舶避碰上的研究成果如下:
1)基于专家系统的船舶智能避碰系统
专家系统是一种典型的智能控制系统,又常被叫做专家智能控制,事实上,它具备大量的专门知识以及经验,通过计算机的语言表示出来,即把人类的语言符号直接转换成计算机语言的符号,这样,使得机器人可以解决一些专门领域的专家级的问题。
基于专家系统的智能避碰系统特点是知识库与推理机的彼此之间既是独立的又是互相影响的,其组成可以见图1-1,他的主要特点是在原有的知识库里还添加了一系列与船舶避碰有关的专家知识以及避碰的规则,相对来说知识库更加的全面,更加容易推广,而且基本能解决船舶避碰中的一般性问题。
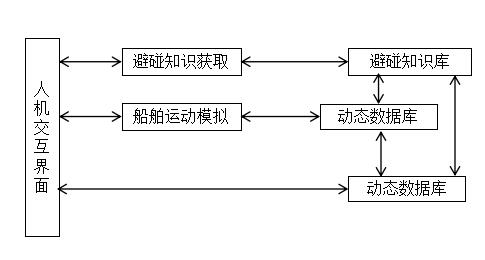
图1-1船舶避碰专家系统
其主要的分类可分为:(1)基于AIS的船舶避碰系统;(2)基于ARPA和AIS融合的船舶避碰系统;(3)其他专家系统。
目前,如何优化知识库以及推理机上是学者们在研究专家系统的海上工程运用时的研究重点,这类系统的优点是便于模块化,因为知识库和推理彼此之间既是相互独立的,也是互相影响的。它的不足之处在于,因为技术上还有所欠缺,在实际上,智能避碰系统的操作绝大部分都是用符号操作,对于一些实时的非确定性问题,还没有很好的解决方法,总的来说,显的比较单一,有待于进一步的分析优化。
2)基于模糊控制的智能避碰系统
对于参数化明确的系统,传统的控制理论有比较好的控制效果,但是在船舶避碰的过程中,对于那复杂的环境,很难精确的用参数来描述,模糊数学是一个相对较好的解决方法,由其延伸的模糊控制方法能够容纳更多的信息,不依赖于被控的对象,是一种非线性控制系统。
该控制方案主要是通过输入值同模糊推理规则里面的条件部分的隶属度函数进行模糊化操作,从而获得模糊化的值,接着通过相应的算法对各个条件部分进行综合处理,最后进行清晰化。
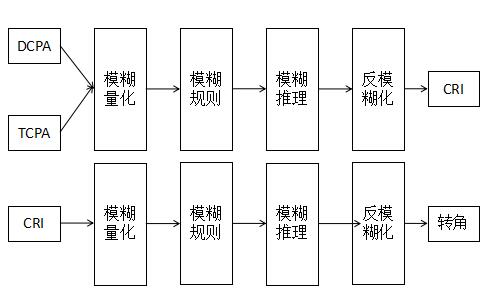
对于运用在船舶避碰系统里的模糊控制的主要步骤为:
- 将输入量(DCPA,TCPA)通过隶属度函数模糊化。
- 通过模糊推理的规则输入参数的模糊量进行推理,得到模糊化的控制变量。
- 通过隶属函数将模糊控制变量清晰化,得到精确的操船指令。
基于模糊控制的船舶避碰系统是以模糊集合为根基的,它的好处是在某种程度上,能够有效的解决一些如避碰等非确定性问的题。然而,他的缺点是推理的输出是依赖于事先就确定好的参数的,并且对于在对模糊控制量进行选择时都是依赖于生活经验,进行的参数设定,不能够很好的结合周围环境因素的影响,从而在自适应性还显的有所欠缺。
3)基于神经网络的智能避碰系统
神经网络系统是一种高度非线性动力系统,而神经网络控制正是以神经网络为根本而构成的,在对人的智能进行模拟时,人们分别从心理和生理进行研究,心理对应着认知事物,生理对应着处理信息。
神经网络控制在实践和理论上,目前人们研究重点是:神经网络的稳定性和收敛性,神经网络控制系统的稳定性和收敛性,学习算法的实时性,以及神经网络控制器和辨识器的模型和结构。
神经网络控制的应用相当广泛,主要运用在如传感技术,电力,化工,环境以及机器人等领域。
关于神经网络在船舶避碰上应用的研究,神经网络由于能够对系统中的不确定参数完成学习记忆,所以如何将神经网络与船舶避碰有效结合应用,已经逐渐成为了船舶避碰领域一个重要的研究方向。神经网络记忆训练后形成的经验,与其他系统结合在一起,如分别与专家系统以及模糊控制的结合,运行过程如图1-2所示:
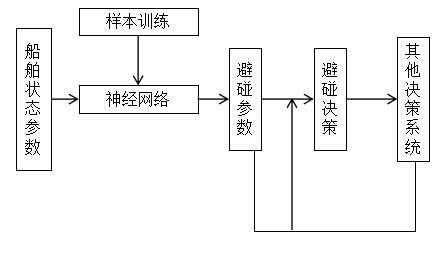
图1-2神经网络避碰系统
神经网络在船舶智能避碰系统中运用的特点是在于算法收敛的不仅速度快,而且适应性好,能够有效的提高模型的工作效率,然而缺点也相当的明显,比如比较容易陷入局部的极值,且需要用到大量的有效的数据,因此现在还仅仅只能通过仿真的手段对其进行验证,还很难运用到实际应用上。
1.2.2 模糊控制的研究现状
19世纪60年代,控制理论专家ZadehA首先给出了用模糊集合描述客观不确定性的信息这一理论,自此以后模糊逻辑理论开始有了相当迅速的发展,取得了巨大的突破,并且应用于多种领域。模糊控制的就是主要利用模糊集合理论,把人进行控制时所采用的自然性语言进行转化,从而变成为计算机能够接受的算法语言,这是其核心内容。这样不仅能实现预期的控制效果,而且能够有效一些复杂的被控对象。随着模糊控制理论的日益成熟,控制技术也已经得到了很好的发展,尤其是在工业领域、电力领域等中处理了许多实际复杂的问题,取得了令人满意的成效。Tor Arne Johansen等学者基于模型预测控制的船舶避碰系统的概念。通过改变两个参数来产生有限的替代控制行为集:偏移到通向自动驾驶仪的导航路线和改变到推进通信站从标称速度到完全反向[4]。K.D.Do提出了一种建设性的方法来设计分布式控制器,迫使一组N个欠载的船舶在海上负载下执行所需的同步运动跟踪任务,并保证船舶之间不会发生碰撞[5]。Jin-Hyeong Ahn等学者将模糊推理系统与专家系统相结合,应用于避碰系统。特别提出了利用神经网络计算碰撞风险的方法[6]。
发展到今天,综合国内外学者的研究和分析,对于模糊控制,国内学者也取得了较为丰硕的研究成果。邵伟等学者通过模糊控制理论对热风温度控制系统进行了优化,成功解决了卷烟制丝过程中热风系统单纯 PID 控制不能够满足工艺带来的温度需求变化等问题。利用了 S7-400 系列的PLC成功研究出了热风温度模糊控制器,对热风温度系统进行有效的控制[7]。张波等学者通过Smith预测原理成功研究出了定常时延下的多变量Smith预测器,并成功的利用模糊理论的知识进行改进,采用模糊控制方法,有效避免了一些不确定性等因素给系统带来的影响;最后,利用半实物仿真系统进行仿真分析,验证其所述方法的可靠性[2].温宗周等学者通过将模糊控制与在自动泊车相结合,成功建立了基于模糊控制的自动泊车系统,并通过分析其运动学模型,建立相应的规则库,设计了自动泊车模糊控制器模型,并通过的将学习算法运用到此模型中,进一步改善了此系统,以达到自动泊车的控制最优化。然后利用仿真软件MATLAB建立模糊控制系统,进行了仿真分析。仿真分析表明,将学习算法与模糊控制结合起来,能够更加有效的完成自动泊车目标,而且该系统具备自我学习能力,有效的减少了泊车的时间,提高了运行效率[9]。经过国内外学者的研究,模糊控制理论的研究已经取得到了很大的进展。
1.3 本文研究的主要内容
1)基本内容
船舶避碰系统的模糊控制是船舶智能控制的一个主要研究方向,该技术的研究已经经过了许多年的探索,但是,依然不够完善,各国的学者们仍然在不断地研究探索中,显然,这是一个相当值得研究的方向,本文在通过查阅前人所开展研究的基础上,做出自己的创新改变,研究的基本内容如下:
(1)绪论:首先根据实际情况指出本课题的研究背景以及研究意义,总结国内外学者的研究成果确定本次的研究内容和研究的路线。
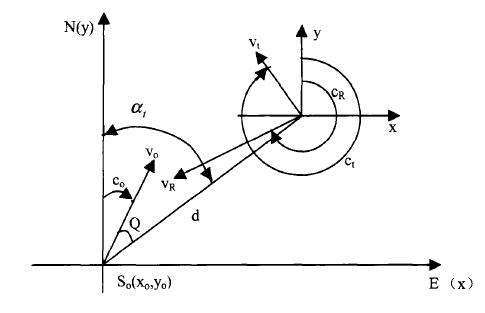
(2)船舶避碰原理研究:主要介绍介绍了船舶避碰的一些原理,首先通过分析船舶碰撞的原因,然后通过学习《海上避碰规则》的一些相关的知识,了解船舶避碰的过程,以及船舶会遇的局势,和船舶会遇的参数,然后通过对航行时的船舶运动模型求得所需参数(DCPA和TCPA)的目标函数,最后对避碰的避让决策以及避碰过程进行研究分析。
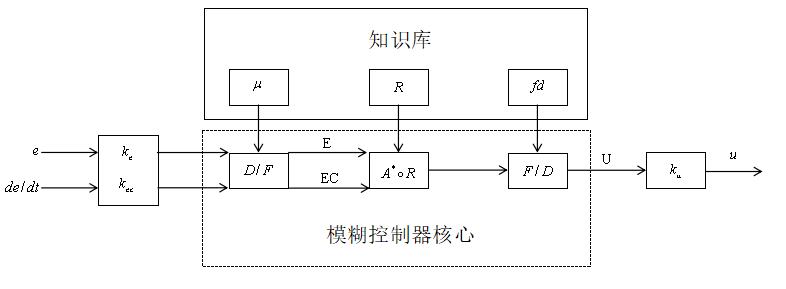
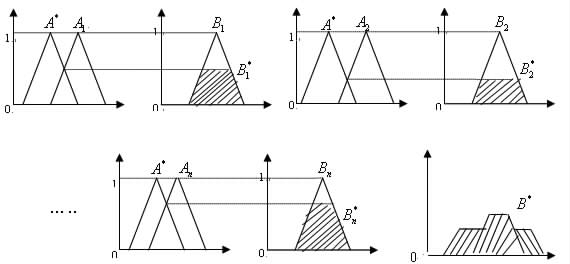
(3)模糊控制基础理论的研究:主要介绍了模糊控制系统的组成以及基本原理包括模糊化运算、清晰化运算、模糊规则库以及模糊推理的理论研究,为后文建立模糊系统奠定基础。
(4)模糊控制在船舶避碰中的应用:首先介绍了船舶碰撞危险参数(DCPA和TCPA)的模糊特性,然后介绍了模糊控制系统的设计方法,然后根据航海员的操作经验设计了船舶避碰的模糊控制器
(5)通过MATLAB软件中的工具箱对所建立的模型进行仿真分析,并在典型工况下进行评价与分析。
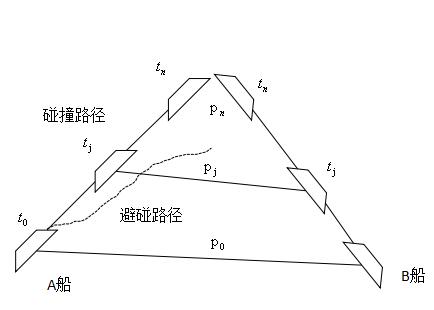
(6)通过考虑了带有参数的隶属度函数在船舶避碰的应用,由于船舶航行中的多种因素,对隶属度函数设置参数,考虑了多船避碰时,决策的困难性,建立一个综合的决策模型。给出一个较为典型的多船会遇局势,给出多种避碰方案,通过建立的综合决策模型,通过分析避碰方案的避碰效果,对其进行评价。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: