基于PLC的抓取机械手模拟控制系统设计毕业论文
2020-03-03 10:03:46
摘 要
社会日渐增长的物质需求促使了自动化生产水平的一个迅速提升,在自动化生产中必不可少的一环就是机械手系统,机械手可以通过气压驱动也可以通过液压,甚至是电气或机械驱动,并且随着PLC技术紧跟现代科技的更新换代,已经完全取代继电器的地位,气压传动技术也因为其污染小,成本低受到工业生产的青睐,所以本文所设计为PLC的气动抓取机械手模拟控制系统。
(1)首先对课题的要求和意义进行分析,再结合国内外技术发展现状以及需要克服那些技术问题进行陈述。
(2)通过对整个系统设计中涉及到的所有技术进行简介,并根据具体的运动要求及目的进行分析,然后进行机械手手爪,腕部,臂部,机身以及限位开关的选型以及计算。所以机械手的选型经综合分析确定为圆柱坐标气动机械手。
(3)对系统最关键的气动回路进行设计与分析。最后对系统的控制流程进行PLC的梯形图编程和MCGS组态程序的编写,通过对程序的编写以及调试结果来最终确定PLC的气动抓取机械手模拟控制系统的整体方案。
关键词:PLC;机械手;MCGS组态;气动。
Abstract
The ever-growing demand for materials in the society has led to a rapid increase in the level of automated production. An integral part of automated production is the manipulator system. Manipulators can be driven pneumatically or hydraulically, or even electrically or mechanically, and follow. PLC technology keeps up with the upgrading of modern technology. It has completely replaced the status of relays, pneumatic transmission technology because of its small pollution, low cost is favored by industrial production, so this article is designed as a PLC pneumatic gripper robot simulation control system.
(1) First analyze the requirements and significance of the topic, and then combine the current status of domestic and foreign technology development and the need to overcome those technical problems.
(2) Through the introduction of all the technologies involved in the design of the entire system, and according to the specific movement requirements and purposes of analysis, and then the robot hand gripper, wrist, arm, body and limit switch selection and Calculations. Therefore, the selection of the manipulator is determined as a cylindrical coordinate pneumatic manipulator through comprehensive analysis.
(3) Design and analyze the most critical pneumatic circuit of the system. At last, the ladder diagram of PLC and the MCGS configuration program are written for the control flow of the system. Through the programming of the program and the debugging results, the overall scheme of the PLC's pneumatic grab robot simulation control system is finally determined.
Key Words: PLC; robot; MCGS configuration; pneumatic.
目录
第1章 绪论 1
1.1 目的及意义 1
1.2 国内外研究发展现状 1
1.3 论文的主要研究内容与问题 2
1.3.1 研究目的 2
1.3.2 研究内容 2
第2章 PLC气动机械手的有关技术 4
2.1 有关技术概况 4
2.1.1 气动技术 4
2.1.2 机械手介绍 4
2.1.3 PLC简介 5
2.1.4 传感器简介 6
2.2 机械手的组成及控制要求 6
2.2.1 机械手的基础类型 6
2.2.2 机械手的控制要求 7
2.2.3 课题机械手的选型 8
2.3 机械手的设计 9
2.3.1 设计手爪的类型及选用 9
2.3.2 机械手腕部设计 11
2.3.3 机械手臂部的设计 11
2.3.4 机身的设计 12
2.4 限位开关技术与选型 12
2.5 本章小结 13
第3章 PLC气动机械手系统功能模块元件及回路 14
3.1 系统的功能模块 14
3.1.1 手动操作功能模块 14
3.1.2 自动操作功能模块 14
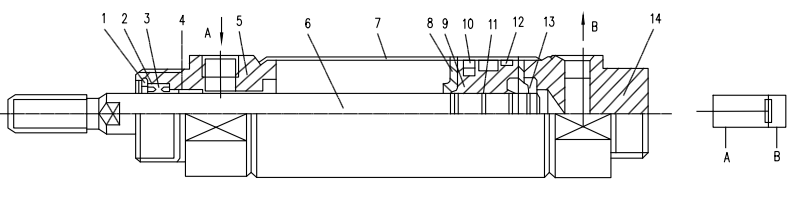
3.2 气动PLC机械手的气动元件配置 14
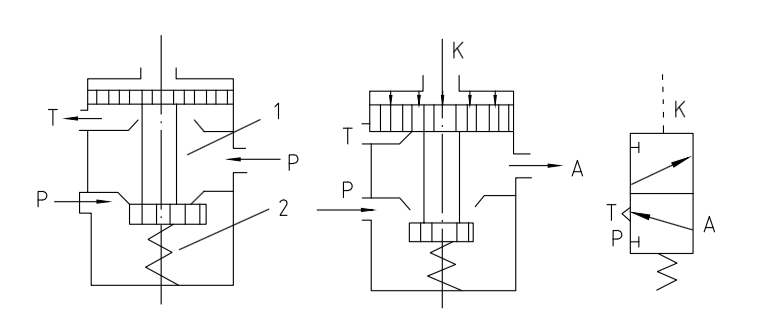
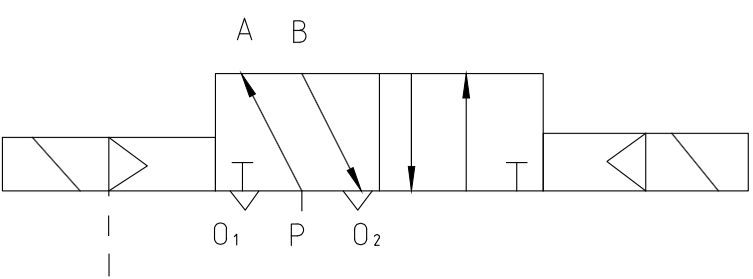
3.2.1 气动控制元件 14
3.2.2 气动执行元件 16
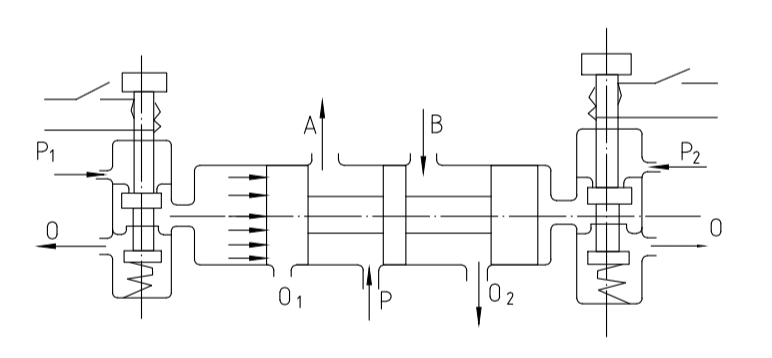
3.3 气动PLC机械手的气压回路 17
3.3.1 气动回路图 17
3.3.2 气动控制系统 18
3.4 本章小结 19
第4章 基于PLC的控制系统 20
4.1 PLC的硬件设计原则及选型 20
4.1.1 输入输出(I/O)点数的估算 20
4.1.2 存储器容量的估算 20
4.1.3 结构形式的分析 20
4.1.4 经济性设备的选择 20
4.2 PLC的主电路图和I/O分配表以及外部接线图 21
4.2.1 I/O分配表 21
4.2.2 主控电路图 21
4.2.3 外部接线图 22
4.3 本章小结 22
第5章 系统的搭建与调试 24
5.1 PLC的安装与调试 24
5.1.1 PLC的安装环境 24
5.1.2 PLC程序的调试 24
5.2 MCGS组态程序的简介与调试 26
5.2.1 程序简介 26
5.2.2 程序编写及调试 27
5.3 经济性与环保性分析 28
5.4 本章小结 28
第6章 总结与展望 29
6.1 全文总结 29
6.2 研究展望 29
参考文献 30
附录A 31
附A1 PLC程序 31
致谢 45
第1章 绪论
1.1 目的及意义
伴随着社会以及科技的不断进步,工业自动化程度越来越高,在其中机械手是一个非常关键的组成成分。生产机械手的应用为工人降低了压力,并且可以提高生产精度,在化学工厂或者机械行业等危险性较大行业里应用的较为广泛,如机械行业里的热处理以及电镀;在化工行业里进行药剂的搬运以及适配;注塑机械手去取产品时可以避免注塑机故障夹伤工人。
机械手具有多种驱动控制方式,而气压传动是实现自动化控制的一种重要的技术,以空气为压力介质,很难造成污染,并且具有动作迅速,稳定,可靠,重量较轻,体积小,节能等特点。因为以上的这些特点所以客户对气压传动机械手尤其看重,各组织对其投入的时间精力与金钱愈发增长。所以现在气压机械手就是普遍工业自动化生产的技术方向。
在工业自动化需要机械手快速发展的大环境下,本设计选取PLC控制电磁阀来控制机械手的运行流程,因为项目是抓取机械手,所以夹紧力要求不太大,所以选取气压传动的机械手。
1.2 国内外研究发展现状
现代工业机械手起源于二十世纪四十年代,最初是由美国开发出来一款作为教学实验和主从控制的具有多自由度的自动化系列产品。在逐渐的发展过程中,1958年美国联合控制公司研发出了第一台机械手,这台机械手的结构是:回转长臂安装在集体上,电磁铁工件作为底部安装的投放机构,控制系统为示教系统[1]。1962年,美国机械铸造公司在之前的发展[2]的基础上也开发出一种模拟坦克炮塔的数字控制教学机器人,使用手臂回转,俯仰和液压传动,大多数球式通用机械手都是在这个基础上发展起来的[3]。与此同时,该公司还开发了Versatran机械手,该机械手最初是为了灵活处理各种工件而设计的。该机械手与上文公司机械手基本相同,但可以升降和伸缩。1978年美国Unimate公司和斯坦福大学,麻省理工联合研发了一种Unimate-vic-arm工业机械手,用小型电子计算机控制,定位误差小于1毫米[4]。之后所有国家开始对机械手的研究,德国机器制造业从1970年开始应用机械手于运输,设备上下料和焊接,起重方面,同时德国knka公司也生产了一种用程序控制且关节机构的点焊机械手。日本也是大力发展机械手的国家之一,不同于德国的工业全面发展,日本在部分工业如机械手和传感器方面有着极强的先进性,在1979年日本机械手产量便达到14535台,到2008年便达到了106900台,占全球总份额的七成,是机械手行业中的巨头 [5]。
在中国,机械手学科发展还是较于国外要更缓慢一些,直到20世纪90年代,柯马(上海)汽车设备有限公司,青岛殴地希机电有限公司等开发适用于客户的机械手[6]。一直到机械手发展至今,国内机械手仍然进口所占比例相对较大,2012年各占50%[7]。中国的机械手技术研究正在逐步走上正轨,在黑电和白电生产线上以及高精尖芯片和液晶面板等流水线上采用较广泛[8],中国机械手应用区域主要是上海,辽宁等,华东地区约占总份额56%,主要将工业机械手投入运用如搬运,注塑,装配,焊接等,其控制方式主要基于单片机技术和PLC技术为核心,并且PLC为主要技术。
总结来说,到目前为止机械手经历历代的发展,到如今我们主要的任务就是通过机械手内的微型计算机控制,通过机械手外部各种传感器和编程语言来达到控制机械手完成任务的目的。对未来的更高的展望是通过对编程算法的革新和传感器的革新来使机械手突破一个机械部件称为一个拥有一定人工智能的机器人,可以通过自我检测与自我升级,并且能面对各种情况作出合理有效的手段去应对。
1.3 论文的主要研究内容与问题
1.3.1 研究目的
在现代流水线生产中机械手越来越受到重视,是机器人学科关键的一环,在实际工厂里,机械手不但可以提高自动化效率,并且可以提高生产精度与安全性。
通过在机器人学科的深耕,让机械手的生产更加精简化,使得流程更加规范,成本价格更低,使得工业机械手在现实中得到更加广泛的应用,将机械手学科研究的更加深刻与透彻,为实现中国工业4.0全自动化做准备。
1.3.2 研究内容
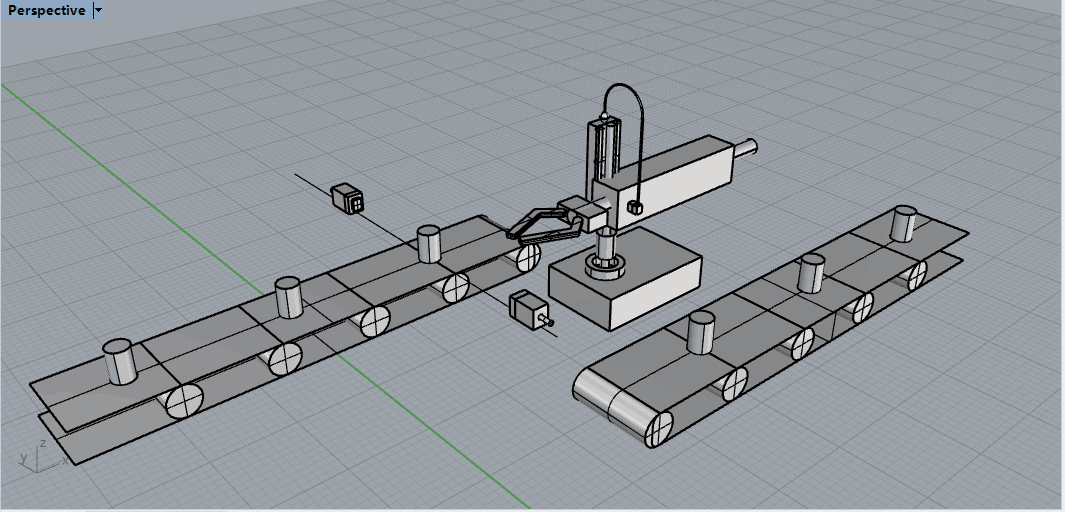
研究课题以气压传动控制的机械手作为研究对象,而其控制操作方式一般分为两种:手动操作和自动操作。在手动操作系统的情况下是指各个气缸的运动单独由手动按钮去控制,比如在水平运动上设置两个按钮,一个控制向左移动,一个控制向右移动,只有在按下该按钮的情况下机械手才会运动,即按即动,否则机械手处于静止状态。而自动操作系统是机械手在PLC梯形图程序的控制下按照固定路线完成周期性动作。同时也应该设置一个停止按钮,在运行过程中若按下停止按钮,机械手在该点继续运动直到结束此周期运动。机械手运行过程中要以PLC控制为核心,实现一个气动PLC控制机械手的系统,并且与MCGS组态相结合。
(1)自动操作:原位左上角为起点,逐步完成“原点——右移——水平伸出——下降——延时2s夹紧——上升——水平缩回——左移——下降——延时2s松开——上升——原点”的控制过程为工艺流程。自动操作中的原位为摆动气缸趋向左侧,垂直气缸缩回。水平气缸的伸出即为机械手的伸出,垂直气缸的伸出即为机械手的下降。通过气缸完成驱动力。在自动操作工业流程中,我们通过传感器—极限检测开关,来组成集成电路来控制机械手运动的目的,在达到极限检测开关后马上接通下一道工作流程的气缸电磁阀线圈来实现自动操作。
(2)手动操作:机械手的手动操作是每个按钮对应一个动作:伸出,缩入,上升,下降,左摆,右摆,夹紧和松开等动作。不需要采用固定的操作程序。一般情况下,手动操作是在自动操作过程里出现故障,或者是演示阶段会使用的操作方式。
第2章 PLC气动机械手的有关技术
2.1 有关技术概况
2.1.1 气动技术
气压传动是实现自动化控制的一种重要的技术,以空气为压力介质,很难造成污染,并且具有动作迅速,稳定,可靠,重量较轻,体积小,节能等特点,同时气动技术是普遍工厂实现自动化生产的不可或缺的一环,具有节能、稳定可靠、低成本、环保性等优势。因为气压传动的种种优点,所以气压传动在汽车生产,集成电路焊接以及物流分装仓库等行业发挥了极其关键的作用。又因气压传动技术在各行各业的广泛应用,所以气压传动技术的 发展及其迅猛, 其高精度和低成本的特性使其在以富士康等精加工代工而出名的企业里得到了非常广泛的应用,也提升了其自动化水平与效率。
2.1.2 机械手介绍
机械手是一种根据固定代码以运送工件或操作仪器的类人手的自动装置,其特点是可以实现各种固定程序的工作等,并且精度比人手要高,不会发生疲劳,成本也相较人工成本更低,根据机械手的机械构造与控制方式,其相比于人手与机械移动设备上各有所长。
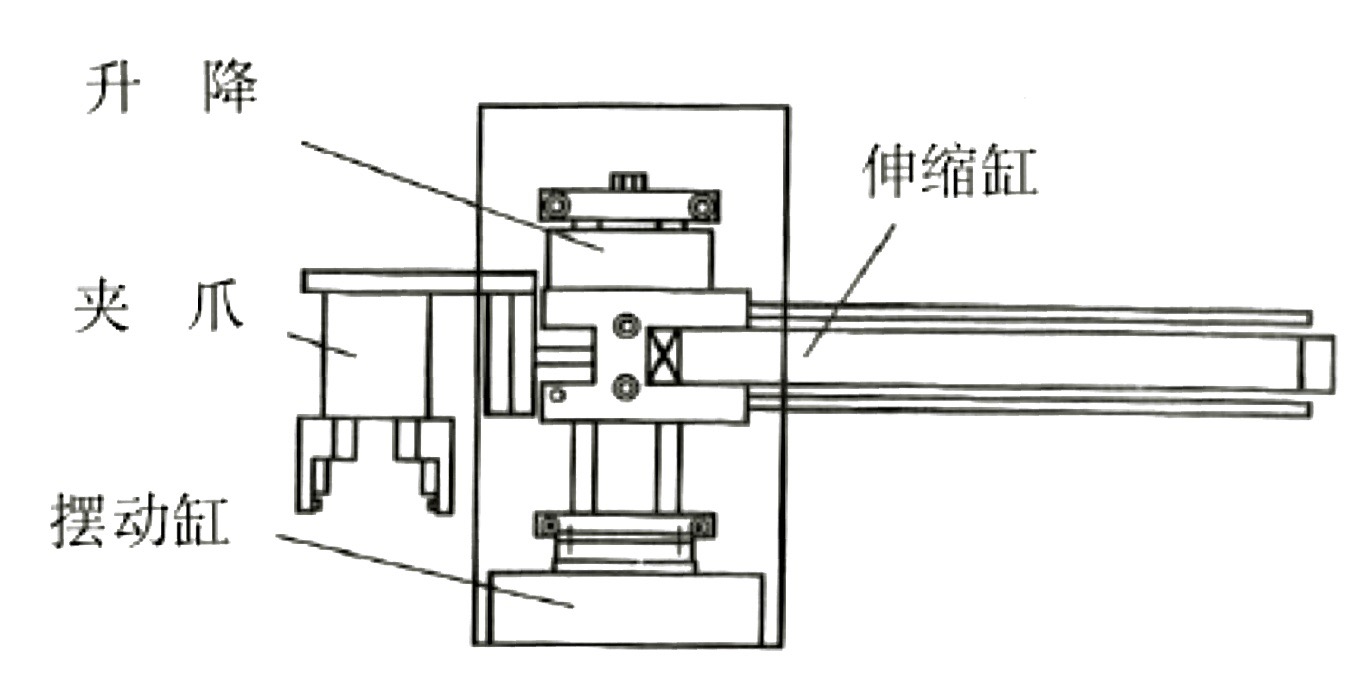
机械手有三大模块分别是:执行系统、驱动—传动系统和控制系统如图2.5。手爪属于执行系统,作用是夹持或吸附工件或使用工具。因为各个机械手的使用环境与夹持工件不同,所以手爪一般具有形式为夹持和吸附两种,腕部起到连接手爪与手臂的一个支承结构。手臂常伴随着机身用于做升降与伸缩运动,底座一般用于固定机械手于流水线或带有运动系统来完成特殊要求。驱动—传动系统主要是通过气压或液压包括电气,机械齿轮等回路来控制机械手的运动。控制系统常用为PLC控制器或其他编码软件等。
自由度是机械手非常重要的一个参数,自由度决定了机械手的灵活性与适用性,一个机械手若其自由度越高,则机构更繁杂庞大,工业常用机械手大约为三个自由度即够使用。
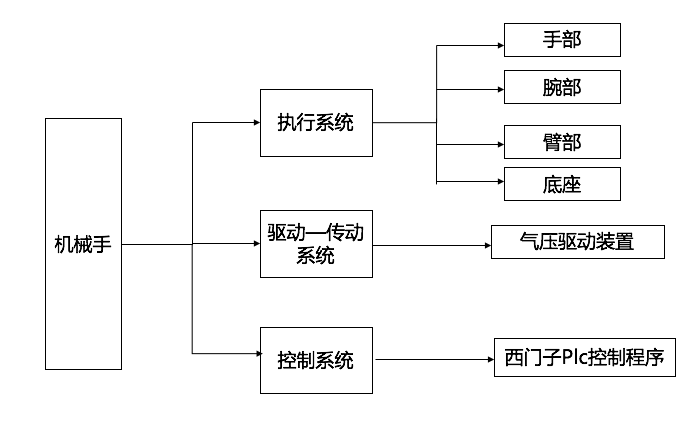 图2.5 机械手的基础组成
图2.5 机械手的基础组成
2.1.3 PLC简介
最初的二十世纪六十年代的可编程控制器称作可编程逻辑控制器(Programmable Logic Controller,PLC),其主要作用是实现编程逻辑控制各种机构。紧跟现代科技的更新换代, Programmable Logic Controller 的功能已经完全突破了逻辑控制。所以现如今其被命名为可编程控制器,英文缩写为PC,但为了不与私人电脑(PC)发生冲突,所以英文缩写还是PLC。
根据结构来看,PLC包括固定式和组合式两类,固定式PLC即为所有的PLC元件都组合在一起形成一个不可拆卸的模块PLC。而模块式PLC即所有的PLC元件都是可拆卸的,根据不同的需求来进行不同的搭配来实现PLC所需要的功能。
PLC的工作原理
PLC的工作原理:PLC程序载入到PLC硬件后,其运转可以分三个流程,即输入采样、用户程序执行和输出刷新。完成上述三个流程即为运行周期。在PLC动作过程中,核心CPU一直以稳定的速度扫描以上流程。
(1)输入采样阶段。核心CPU通过扫描读入所有输入状态和程序,然后
把它们存储在I/O映象区域的相对的单元里。在扫描结束后,开始进行下两个步骤,因为所有的输入状态已经与I/O映象区域的相对的单元绑定,所以无论输入和程序有任何改变,I/O映象区域的相对的单元也还是和之前载入的一模一样。
(2)用户程序执行阶段。核心CPU以垂直顺序来下载程序(梯形图),根据左前右后,上前下后的逻辑来对每一段梯形图进行计算。再按照结果对程序的输出和其余控件在I/O映象区或RAM存储区内的输出状态进行刷新或者重置,并且梯形图的执行逻辑是按照从上到下的垂直顺序即,一段梯形图内上面的程序输出会对下面的程序产生一定的影响,而下面的输出对上面是无法影响的。
(3)输出刷新阶段。这个过程中CPU根据I/O映象区和RAM存储区对应的状态和程序不停输出,然后通过输出电路控制对应的外部控件。
2.1.4 传感器简介
传感器是通过感触到被测物体的某种变化然后根据特定的规律转换成数字结果的器件。传感器不仅仅是一个转换器件,在各行各业里面传感器都是必不可少的,从高端的人工智能到生活里处处可见的超市购物等等,同时传感器更是飞速进步的物联网里面最关键的一环。
PLC机械手必须系统的有根据的选择传感器。对传感器的要求必须是稳定性高,数据可靠,可适应性强,低成本等条件,所以在单纯追逐检测精度与范围度高的传感器时还要考虑到稳定性与成本的问题。随着物联网的不断进步,传感器技术也在飞速进步并逐步发展成成熟的专业技术。
2.2 机械手的组成及控制要求
2.2.1 机械手的基础类型
(1)直角坐标式
直角坐标式机械手是一种能模范人手臂和手来完成直线重复的工作的机械手,常用于工件整齐排列的流水线或与传送带搭配。该机械手可左右,伸缩和上下移动,具有多自由度且运动自由度间成空间直角关系。该机械手也有一定的优缺点:
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: