基于RFID的叉车路径规划与监测毕业论文
2020-02-19 15:04:16
摘 要
随着社会的进步,科学技术的发展,物流设备在经济发展中的地位也越来越明显,叉车普及率也越来越高。但叉车在仓库中的路径和行为极需要进行规划和管理,尤其是在地面平仓等对叉车行为要求比较高的情况下,对叉车的行驶行为规范要求更高。本文主要对叉车路径规划及监控的关键问题——路径规划算法和RFID监控技术做了研究。
首先为系统选用硬件和规划软件的功能以及讨论软件和硬件的连接方式,经过调查现有的RFID在监控系统中使用情况和参考了一些仓库管理系统,最终确定了RFID读写器的选择和系统的基本功能,以及RFID读写器和软件的数据传递方式。
其次分析了两种路径规划算法,比较了两种算法的优劣,根据算法的计算时间和扩展范围,最终选用A*算法作为叉车的路径规划算法。同时研究了如何用时间窗算法来解决多叉车的路径规划问题。
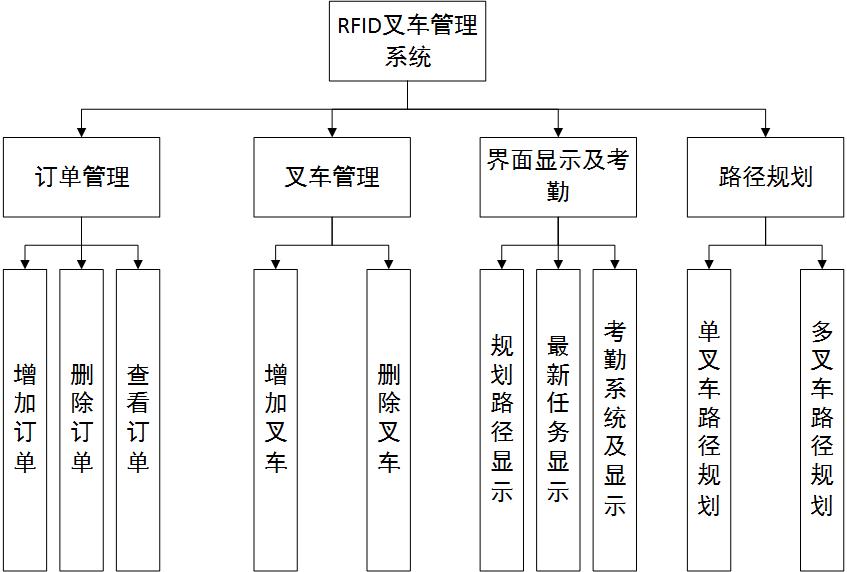
然后,对系统功能进行了设计,包括了数据表,订单管理和叉车管理模块,路径显示模块以及考勤模块。其中除设计表之外的功能模块都需要调用或者修改数据表的内容,以达到规定的功能目的。
最后,建立了完整的叉车监控系统,验证了系统的可行性。
关键词:路径规划、A*算法、RFID定位技术
Abstract
With the advancement of society and the development of science and technology, the status of logistics equipment in economic development has become more and more obvious, and the penetration rate of forklifts is also getting higher and higher. However, the path and behavior of the forklift in the warehouse need to be planned and managed, especially in the case of high requirements on the behavior of the forklift when the ground is closed, and the requirements for the driving behavior of the forklift are higher. This paper mainly studies the key issues of forklift path planning and monitoring, path planning algorithm and RFID monitoring technology.
Firstly, the hardware and planning software functions are selected for the system and the paper discusses the connection method of software and hardware. After investigating the existing RFID usage in the monitoring system and referring to some warehouse management systems, the RFID reader selection and system were finally determined. The basic functions, as well as the way data is transmitted by RFID readers and software.
Secondly, two path planning algorithms were analyzed. The advantages and disadvantages of the two algorithms are compared. According to the calculation time and extension range of the algorithm, the A* algorithm is chosen as the path planning algorithm for the forklift. At the same time, how to solve the path planning problem of multi-forklifts with time window algorithm is studied.
Then, the system function was designed, including data table, order management and forklift management module, path display module and time and attendance module. The function modules except the design table need to call or modify the contents of the data table to achieve the specified functional purpose.
Finally, a complete forklift monitoring system was established to verify the feasibility of the system.
Keywords: path planning, A* algorithm, RFID positioning technology
目 录
第1章 绪论 1
1.1 研究目的及意义 1
1.2 国内外研究现状 2
1.3 论文主要内容 4
第2章 系统整体架构 6
2.1 系统研究路线 6
2.2 硬件的选择与设置 7
2.3 软件功能简介 8
2.3.1 窗口整体简介 9
2.3.2 订单管理模块 9
2.3.3 叉车管理模块 9
2.4 本章小结 10
第3章 叉车路径规划 11
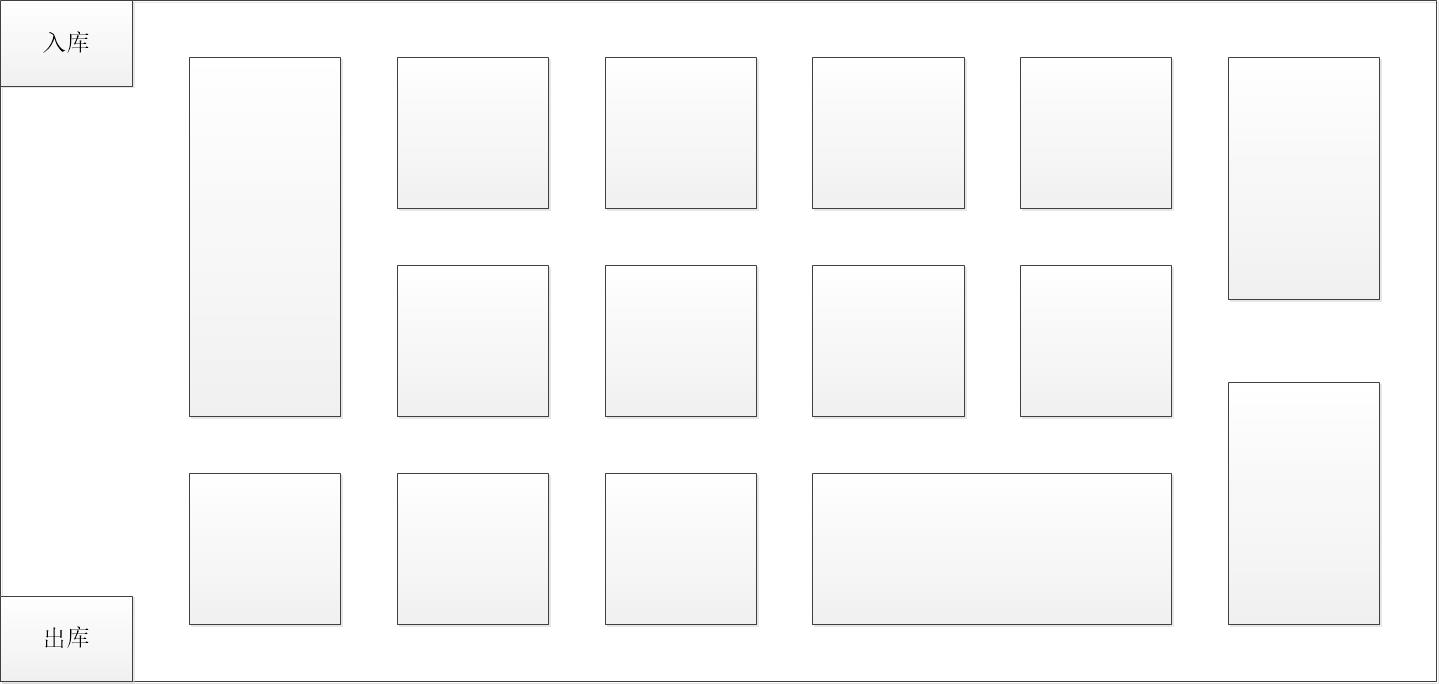
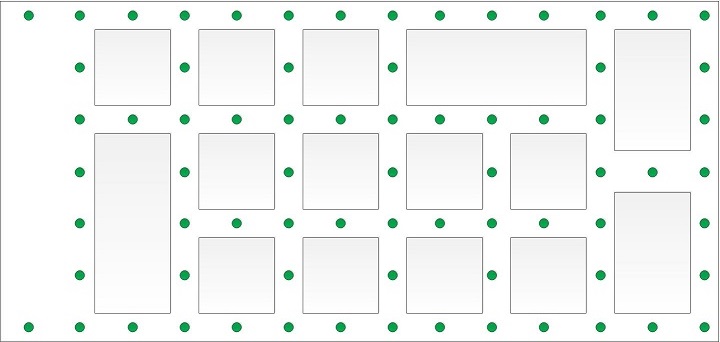
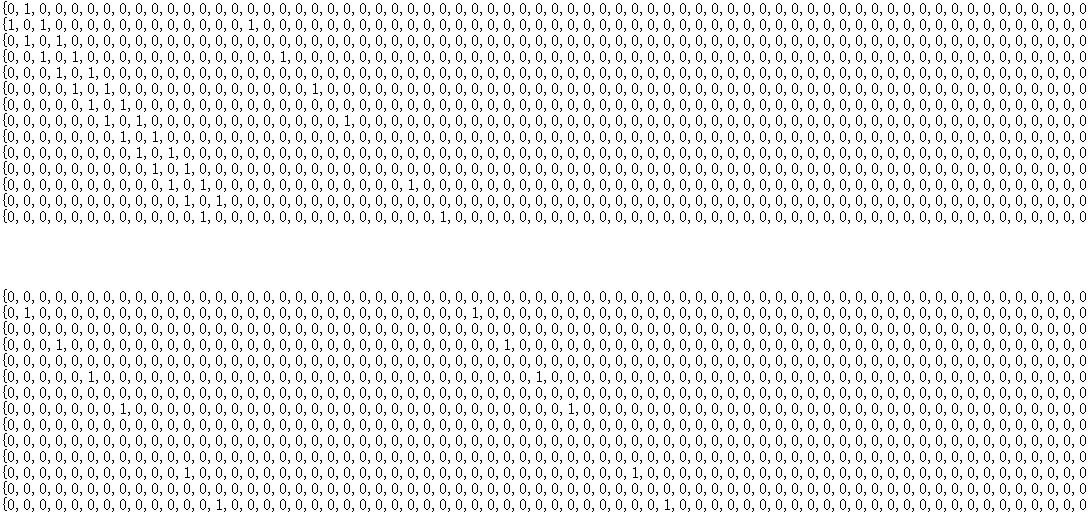
3.1 仓库拓扑地图建模 11
3.2 单叉车路径规划 13
3.3 多叉车路径规划 17
3.3.1 其他领域的多设备路径规划 17
3.3.2 多叉车路径规划 17
3.4 本章小结 18
第4章 系统功能设计 19
4.1 数据表设计 19
4.2 订单管理系统及叉车管理系统设计 20
4.2.1 增加订单和删除订单 20
4.2.2 增加叉车和删除叉车 21
4.3 规划路径显示及最新路径显示 22
4.4 定位系统及考勤系统 22
4.4.1 RFID定位系统 22
4.4.2 考勤系统 23
4.5 本章小结 24
第5章 总体系统调试 25
5.1综合调试 25
5.1.1 订单管理系统调试 25
5.1.2 叉车管理系统调试 26
5.1.3 路径规划、显示、考勤系统的调试 28
5.2综合调试总结 29
5.3经济性分析 30
第6章 总结与展望 31
6.1论文总结 31
6.2展望 31
参考文献 32
附录 34
致谢 40
第1章 绪论
1.1 研究的目的及意义
随着科学技术的进步,社会的发展,物流设备在经济发展中的地位越来越明显,叉车的普及率也越来越高。叉车在企业物流系统中发挥着非常重要的作用,是物流搬运设备的主力军。这种无轨、使用轮胎行走的装卸搬运车广泛应用于工厂,矿山,仓库,车站,港口,机场,货场,流通中心和配送中心等,并可以进入船库,汽车和集装箱进行装卸货作业。它是托盘运输和集装箱运输中不可或缺的设备,用于装卸货物,堆垛,卸货以及托盘和集装箱的短距离搬运。
叉车在物流仓储中的重要地位开辟了良好的发展空间。 同时,多元化,智能化的物流仓储需求对叉车的发展提出了更高的要求。近年来,除了系列化,多样化和绿色能源技术的发展之外,叉车也越来越注重叉车自动识别技术的发展和应用,这种发展不仅需要提高叉车的整体运行水平,而且在确保叉车基本的能源传递功能的同时改善复合功能,追求更多的附加值,为实现智慧物流、智慧仓库起到重要的支撑作用。
现有的叉车操作安全规范中,主要规范了叉车运行时的速度,作业时的位姿及一些操作人员注意事项,但没有对叉车路线的具体规定,即只要不超过安全线,不超过最高运行速度即可。但在弯道等不易控制的地方,叉车会容易超过安全线甚至撞倒货物导致安全事故的发生。而随着科技进步的发展,仓库的智能化趋势无可避免,同时路径规划在整个物流系统中又有较为广泛的运用,如菜鸟驿站就在其车辆运输领域使用了路径规划,目前通过在零售通城配业务中应用车辆路径规划算法,订单配送成本已经降低了10.3%,并推动仓库货物流转效率的提升,仓库集货周转时间降低了57%。而在国内外的很多智能仓库中,路径规划算范被广泛用于AGV的路径计算和避障上,使得仓库的整体出入库效率得到了极大的提高。因此运用算法对叉车路径进行规划可以极高的提升出入库的运行效率,降低叉车运行成本,规避可能遇见的风险。
因此规范工人的操作,促进安全生产环境,提高整体出入库的效率对现有仓库的运行具有重大意义。本文就在此基础上提出了用算法来规定叉车的行驶路线,同时用RFID系统来读取叉车的真实行驶路线并与计算的路径对比,以此达到监视叉车行驶路径,规范驾驶员行为的目的。
1.2 国内外研究现状
本题的研究方向主要有两个方面,一是将RFID技术运用到叉车定位中,二是采用何种算法对叉车路径进行规划。
国内研究中,RFID技术已经广泛运用于智能仓库中,多用于对货物的定位、调度,部分用于对AGV小车的定位。张力在《基于RFID定位的AGV导航系统设计》中利用阅读器发出的信号对电子标签进行搜寻,读到哪一个标签此标签对应的位置就会被记录下来。同时他也指出,此种定位方法精度不算很高。刘行在《基于 RFID 的定位技术研究》中详细阐述了各种定位方式(GPS、RFID、WiFi、UWB)的定位算法并比较了他们的优劣。熊宠威等在《基于参考标签的低成本 RFID 定位系统研究》中利用阅读器读取标签的概率作为虚拟信号强度的定位方法。在定位区域利用参考标签标定角度,读取概率模拟距离,配合阅读器功率调整对区域划分实现待定标签定位。



对于此方法的优化,刘锏泽在《基于RFID和视觉的AGV控制系统设计》中提出了将RFID与视觉定位结合起来的复合导航控制系统,以解决现有导航方式存在定位精度低、稳定性差、附加成本高等问题。汪思迪在《基于惯性导航、RFID 及图像识别的AGV融合导航系统》中提出一种新型的 AGV 定位导航方案,通过RFID 与图像识别解决惯性导航误差累计的缺陷。


彭小莉在《制造物联环境下智能仓库叉车作业分配算法研究》中简单介绍了叉车是通过设置固定RFID读写器来采集数据,通过设置车载智能终端与后端计算机系统进行数据传输。国外研究中,《The Concept of RFID-Based Positioning System for Operational Use》详细介绍了RFID的种类及如何使用RFID对物体进行定位。而《Passive RFID Positioning System Using RF Power Control》中介绍了一种根据实际环境中无源RFID标签的功率控制值来估计位置的方法。


在算法方面,国内关于仓库路径基本只与AGV小车有关,大多采用两种基本算法:Dijkstra算法和A*算法,这两种方法主要用于单车系统。杨俊成在《路径规划算法的研究与发展》中详细描述路径规划算法中所涉及的相关概念,并绍点到点路径规划算法,分别从A*算法、人工神经网络算法、蚁群算法、遗传算法和粒子群算法5个方面对之进行详细描述。李婷在《自动化仓库系统多AGV 路径规划和避碰策略研究》一文中详细介绍了两种单AGV路径算法,同时对 A*算法的代价函数进行改进,使得离目标点越远的当前点搜索速度更快,离目标点越近的当前点越能保证最近距离,最终改进的A*算法取得了最高的效率。吴思凡在《基于A*及其扩展算法的运动规划算法研究》中阐释了基于改变权重的改进A*算法,多个启发式函数的改进的A*算法,处理多复杂环境的改进A*算法等其他变种A*算法。



对于多车系统,刘敬一则在《自动化仓储调度系统中多 AGV 路径规划的研究与实现》采用时间窗来预测可预测冲突,同时采用低优先级等待或低优先级重新调度的方法来解决。张峥炜在《时间窗约束下的AGV动态路径规划》中结合时
间窗理论和Dijkstra算法,提出一种动态路径规划算法,该算法旨在为AGV规划一条连通任务起点和任务终点、无冲突且行驶时间最短的路径。通过仿真实验,将本文算法与先进行路径规划再进行时间窗排布的算法进行对比分析,结果验证了本文算法能够有效减少AGV的行驶时间,提升自动化码头的运行效率。岩桥在《基于改良时间窗的AGVs避碰路径规划》中通过实时改变自动导引车通过节点的优先级,调整相应节点的自动导引车的通过顺序来更新自动导引车运行路径,对时间窗算法进行改良,从而实现多自动导引车动态环境下的路径规划。徐海军在《基于A*算法的无冲突路由多路AGV控制策略》在 A*算法的基础上加入贪心思想,以选择最优路径;对自动导引小车(AGV)系统,提出了一种基于时间窗的 A*改进算法,解决多路 AGV 的冲突问题。




另外,王鹤南在《人机混合环境下的多AGV系统路径规划研究》中,将动态规划与加权拓扑图相结合,提出了一种用于解决人机混合环境中的复杂交通问题动态参数拓扑图,采用Dijkstra算法求出单个AGV离线的最短路径解。 当路径不能满足避免冲突的情况时,采用带约束的多目标遗传算法进一步推导出全局最优解。

国外此方面主要研究AGV和其他智能仓库运输设备的路径规划。《Robotic Forklifts for Intelligent Warehouses:Routing, Path Planning, and Auto-localization》一文中提出了将仓库模型转化为环境拓扑图,采用路由算法(使用仓库的拓扑图计算每个AGV的总体任务执行时间和最小全局路径),本地路径规划算法(基于A *算法,它搜索仓库拓扑图中两个节点之间的本地最小路径)和自动定位算法(应用扩展卡尔曼滤波器-EKF-估计AGV的实际位置)来对智能叉车的路径进行规划。《Development of collision free path planning algorithm for warehouse mobile robot》一文中将地图栅格化,并计算所在格相邻格到目标格的欧几里得距离,最小的即为下一步直至到达目标点。其主要将此种算法运用于竖排,横排及鱼骨形仓库。


1.3论文主要内容
在上一节的国内外研究中,我们看到了各种各样的定位技术的优劣,RFID技术如何在系统中进行运用,现有路径规划算法的优劣势以及对A*算法的改进,还有多设备路径规划问题的解决方法灯研究现状。
本文在参考了这些研究成果后,首先讨论了用何种算法对单叉车和多叉车进行路径规划的基础上,提出了用时间窗算法及设定重新计算规则的方法来解决人工操作的不确定性对算法造成的影响。同时实现了使用RFID对叉车进行定位并与计算出的路径进行比较,规范叉车的行驶路径,在此基础上实现了硬件与软件的结合,硬件接收数据,软件处理数据展示结果,最终实现了整个系统的架构。
本文的章节安排如下:
第一章绪论,主要讲述论文的研究目的和意义,国内外对A*路径规划算法研究现状,最后是论文的主要内容。
第二章为系统的总体架构。首先介绍了本文的技术路线,然后介绍了本系统的硬件选择,软件的主要功能及软硬件间数据的传递方式。
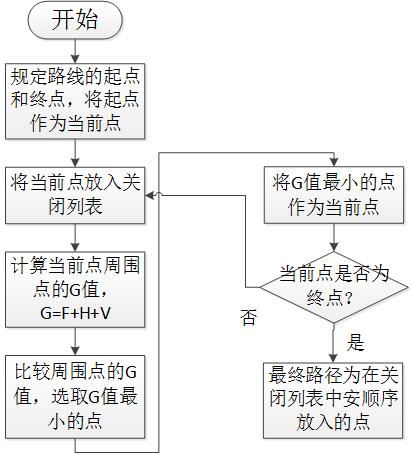
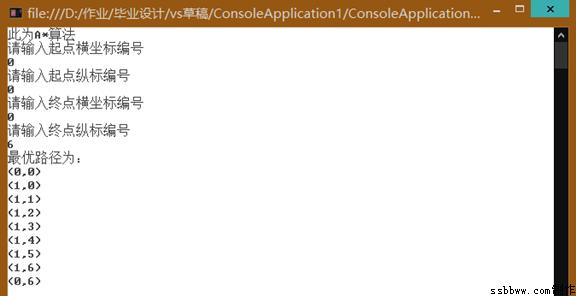
第三章为叉车路径规划,主要讲述了单叉车路径规划方法,多叉车路径规划方法。单叉车规划比较了A*算法与Dijkstra的优劣,最终选用A*算法作为系统的路径规划算法。多叉车路径规划算法采用的是简单的时间窗算法。
第四章为系统功能设计,主要讲述了如何实现系统的各个功能模块,其中首先要建立对应的数据表,然后订单管理系统,叉车管理系统,路径显示系统和考勤系统都是在基于对数据表的修改和调用来实现的。
第五章为总体系统调试,将所有的软硬件结合起来进行综合实验,解决实验中遇到的问题,对系统进行总结。
第六章为结论和展望,总结了本论文的不足之处,说明系统仍可以向什么方向改进。
第2章 系统整体架构
2.1 系统研究路线
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: