单车智能泊车机器人控制系统设计毕业论文
2020-03-13 09:39:45
摘 要
时下兴起的“共享单车”热潮带来了自行车乱摆放导致道路拥堵的现象,本文针对解决该问题的单车智能泊车机器人的控制系统进行设计,以满足机器人在实现各项功能需求的控制要求。
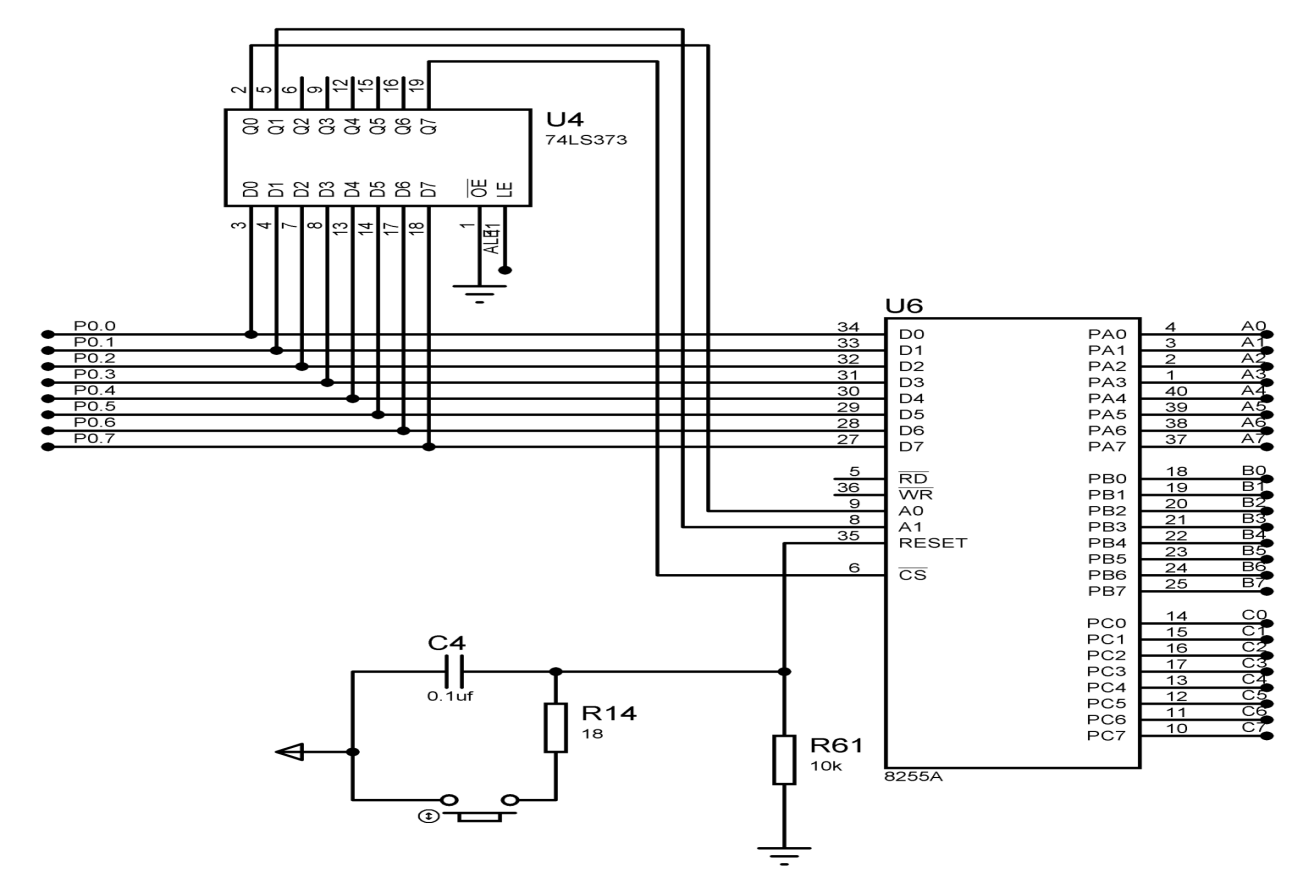
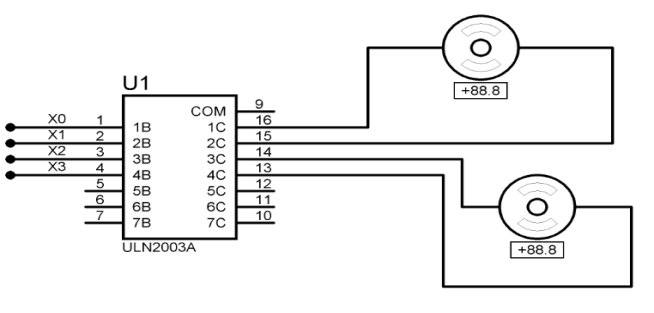
本文首先分析了单车智能泊车机器人的需要具备的功能,以此为基础进行了控制方案思路的总体设计。随后展开了硬件电路的设计,其中采用AT89C52单片机作为主控芯片,并包含采用可编程并行I/O口8255A和锁存器74HC164扩展I0的IO扩展模块,直流电机驱动电路模块、步进电机执行机构模块、LCD1602显示模块、HC-SR04超声波模块、红外光电传感电路模块、电源模块、接口模块、视觉传感器A/D转换模块等其它一些实现功能需求的外围电路模块。
单车智能泊车机器人采用寻迹方式进行导航,为此在移动的过程中运动控制极为重要。通过研究PID控制算法,将其应用于电机PWM调速中。通过建立电机的数学模型,整定参数,确定了PID的各个参数,并通过simulink仿真验证同时应用于后续的控制程序开发中。
最后,本课题完成了单车智能泊车机器人控制程序的开发。通过实际工作的流程设计程序算法,实现PWM调速、红外光电传感器寻迹、超声波接受发送、LCD显示当前状态、机器人抓取等功能。通过仿真验证了单车智能泊车智能机器人的控制系统能够满足机器人自动停放自行车的要求。
关键词:PWM调速;PID控制;多传感器;控制系统;
Abstract
The upsurge of "sharing single car" has brought about the phenomenon of road congestion caused by the cycling of bicycles. This paper designs the control system of the single car intelligent parking robot to solve this problem, in order to meet the control requirements of the robot in realizing various functional requirements.
Functions of the intelligent vehicle parking robot are analyzed in this paper firstly, then the overall design of the control scheme is designed. Then the hardware circuit is designed, in which the AT89C52 MCU is used as the main control chip.It also has an IO extension module, which adopts the programmable parallel I/O port 8255A and the latch 74HC164 to extend I0, a DC motor drive circuit module, a step motor actuator module, a LCD1602 display module, a HC-SR04 ultrasonic module, a infrared light module and other circuit modules, such as electric sensing circuit module, power module, interface module, visual sensor A/D conversion module, and other peripheral circuit modules to achieve functional requirements.
The single car intelligent parking robot uses the tracing method to navigate, so motion control is very important in the process of mobile. By studying the PID control algorithm, it is applied to PWM speed regulation of motor. By setting up the mathematical model of the motor and setting the parameters, the parameters of the PID are determined, and the Simulink simulation verification is applied to the subsequent development of the control program.
Finally, we have completed the development of the control program for single car intelligent parking robot. Through the process design algorithm of actual work, the functions of PWM speed regulation, infrared photoelectric sensor trace, ultrasonic receiving and sending, current state of LCD display, robot grasping and so on are realized.The simulation proves that the control system of intelligent vehicle parking robot can meet the requirements of robot parking automatically.
Keywords: PWM speed control; PID control; multi sensor; control system
目 录
第1章 绪论 1
1.1 国内外发展现状 1
1.2 轮式移动机器人关键技术 1
1.2.1 优化结构设计 2
1.2.2 多传感器信息融合 2
1.2.3 导航与定位技术 2
1.2.4 路径规划 3
1.3 课题研究目的与意义 3
1.4 课题研究主要内容 3
第2章 单车智能泊车机器人控制系统方案设计 5
2.1 功能需求分析及实现思路 5
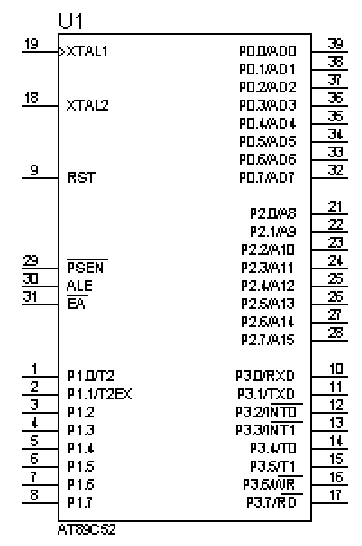
2.2 主控芯片选型 5
2.3 传感器选型 6
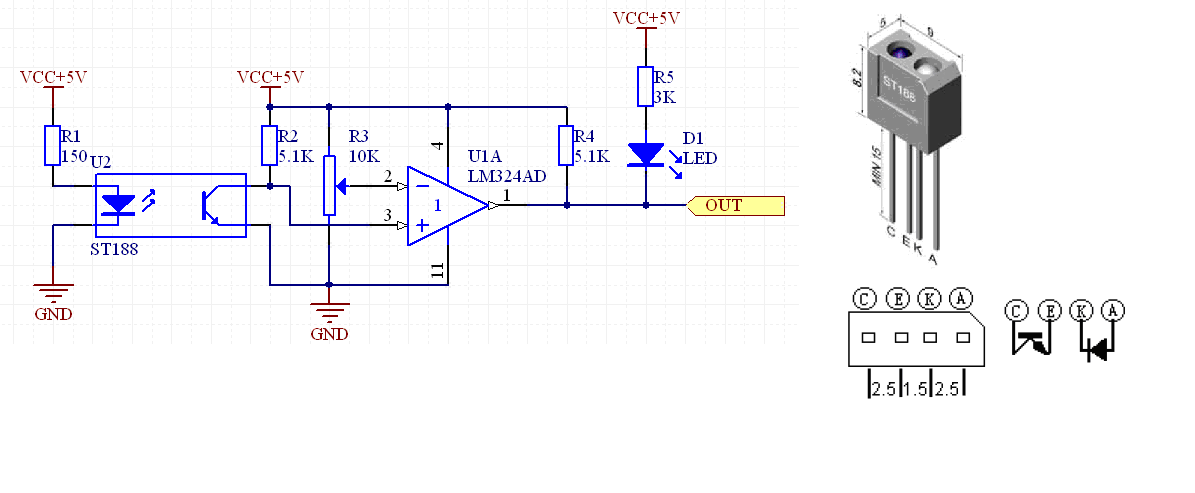
2.3.1 红外光电传感器 6
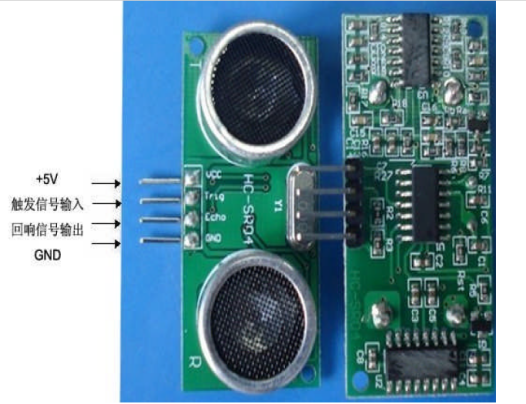
2.3.2 超声波传感器 7
2.3.3 视觉传感器 7
2.3.4 编码器 8
第3章 单车智能泊车机器人控制系统硬件电路设计 9
3.1 MCU及IO口扩展电路 9
3.1.1 8255A扩展 9
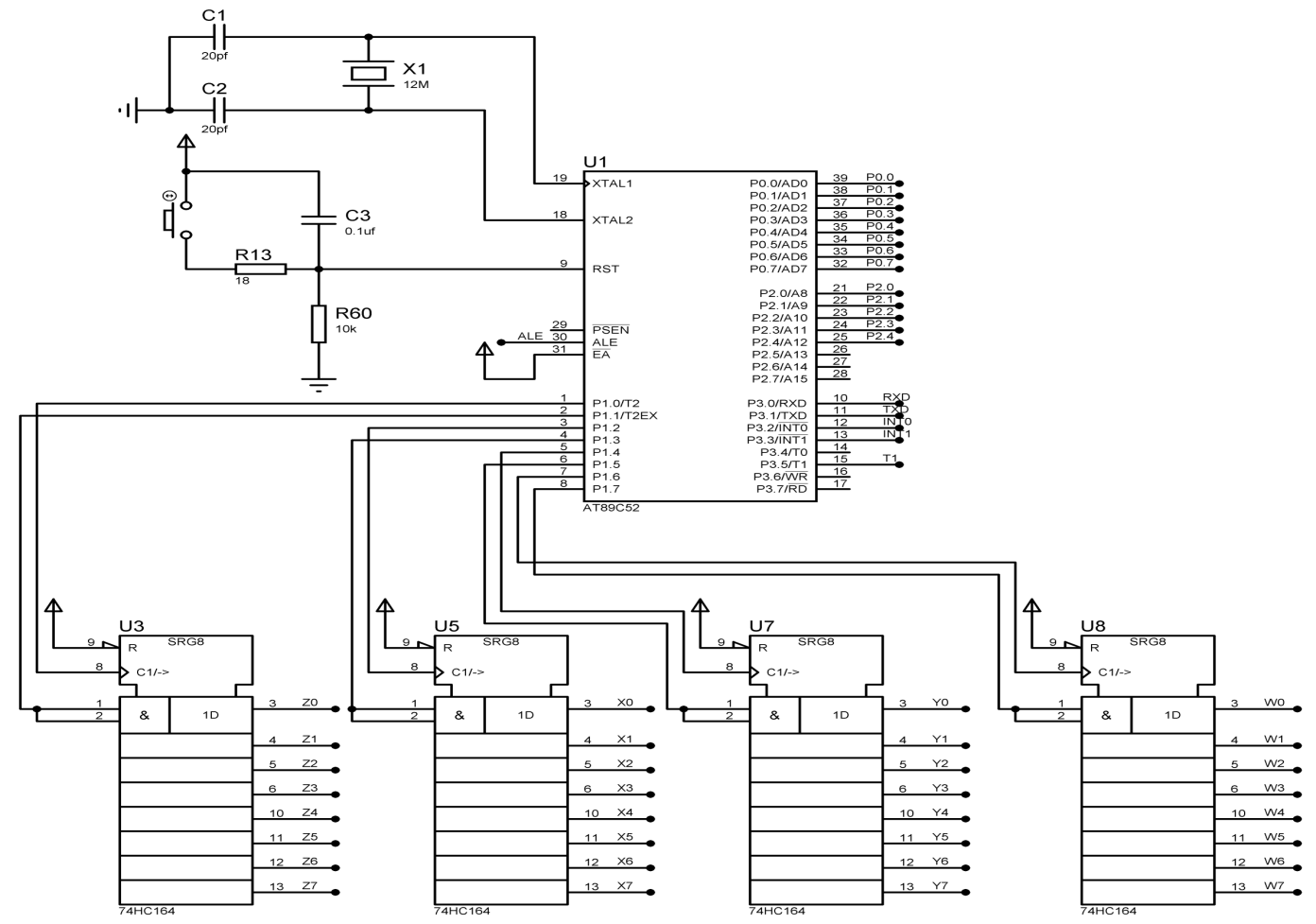
3.1.2 74HC164扩展 9
3.1.3 MCU及扩展电路 10
3.2 驱动电路设计 10
3.2.1 电机选型 10
3.3.2 驱动器选型 12
3.3.3 驱动电路 13
3.3传感器电路设计 13
3.3.1 红外光电传感器电路 13
3.3.2 图像传感器电路 14
3.4 电源及其他外围电路设计 15
3.4.1 电源电路设计 15
3.4.2 其他外围电路设计 15
3.5 通信模块设计 16
3.5.1 蓝牙模块 16
3.5.2 预留通信接口 17
第4章 单车智能泊车机器人运动控制算法研究 19
4.1 PID运动控制算法 19
4.2 位置式和增量式PID算法 19
4.3 建模与仿真 20
4.4 PID参数整定 22
4.4.1动态特性参数法整定PID参数——基于Z-N整定公式 22
4.4.2衰减比例法整定PID参数 24
4.4.3试凑法整定PID参数 24
第5章 单车智能泊车机器人控制系统软件设计 26
5.1 控制系统软件总体方案设计 26
5.2 主程序 27
5.2.1 等待接受命令循环 27
5.2.2 初始化设置过程 28
5.2.3 寻迹过程循环 29
5.3 任务子程序 31
5.3.1 PWM调速程序 31
5.3.1超声波发送接收程序 32
5.3.3 LCD1602显示子程序 32
5.3.4 PID算法实现程序 33
5.3.5 抓取程序 33
5.4 中断服务程序 34
5.5 仿真与调试 35
5.1 PWM调速 35
5.5.2显示 36
5.5.3 PID算法仿真 37
5.5.4寻迹程序仿真 37
第6章 总结 39
参考文献 40
附录A 44
致谢 65
第1章 绪论
轮式移动机器人的发展已经走过了漫长的半个世纪,现在已经到了其井喷式发展应用的阶段。从航空领域到军事领域,从交通领域到服务领域,到处可见轮式移动机器人的影子。多环境下的智能化移动式机器人研究已经逐步取代固定环境中的结构式机械手臂成为时下全新的机器人研究重点。本设计中单车智能泊车机器人实际上是一种轮式自主移动机器人。共享经济的发展延伸出共享单车,但正是共享单车的随意停放的便捷性反而一定程度地影响了道路交通。在车流量、人流量日益增长的时代,肆意停放的单车加剧了道路拥堵,更加不便于人们的出行。如若人为地去摆放乱停的单车,又使得人力成本提升。因此,研究一款能够把单车停泊到指定的停车区域或者智能单车车库入口处的泊车机器人是十分有必要的。
1.1 国内外发展现状
移动机器人从它诞生至今,有越来越多的专家学者投入到它设计研究中。1969年,美国Stanford Research Institute 中的Nils Nilssen和Charles rosen等人研制成功“Shakey”系统,标着移动机器人研究的正式开端。这以后,世界对移动机器人的研究持续地深入、细化。1970年11月10日,前苏联研制的轮式无人探测机器人Lunokhod 首次登陆月球,成为第一台登陆外星球的无人探测机器人[1]。八十年代,美国DARPA提出“战略计算机”计划期望实现车辆能够自主运行;Hughes人工智能中心在1987年首次进行了移动机器人越野实验[2]。1998年,德国科学家在乌尔姆市的中心车站和汉诺工业商品博览会上分别展示了最新研制轮椅机器人;2004年1月4日,美国再次走在前列,研发的“勇气号”移动机器人成功登上火星进行星球探索任务。2008年,美国波士顿动力学公司研制一款称为BigDog的四足机器人具有为美国军方在极端恶劣环境下自主移动提供战略物资的功能。
国内有关移动式机器人的研究还处在追赶国外的状态。在国内,清华大学智能与系统实验室、上海交通大学机器人研究所、中国科学院沈阳自动化研究所、哈尔滨工业大学等科研院对移动机器人的研究已经小有成果。由清华大学智能与系统实验室自主研发的“清华智能THMR-V”具有勘测路面,躲避障碍物实现自主导航的功能,并且能够实时跟踪目标物。上海交通大学机器人研究所研制的“交龙”足球机器人已经斩获中型全自主机器人足球项目的多个冠军,并成功进入机器人足球世界杯RoboCup[3]。中国科学院沈阳自动化研究所研发了由运动机构、传感器系统和控制系统组成的可应用于室内和室外的CASIA-I机器人。香港城市大学智能制造中心自主研制了可用于服务行业的自主移动的机器人。
1.2 轮式移动机器人关键技术
移轮式移动机器人如果想要有进一步的发展和飞越,那么它在各种环境下的适应性,自主移动自我调整的智能性以及良好的运动执行性能就需要进一步的提高。纵观各大机器人研究领域,基本上将从优化机器人的结构、融合多传感器共同作用、导航定位方式和路径规划等方面提升和改善性能。
1.2.1 优化结构设计
结构设计的最主要的依据是实际工程中的功能需求。在保证能够实现特定功能的前提下对机械的机构进行优化设计。优化设计的目的是让轮式机器人能够拥有更为便捷的控制办法、稳定的运动性能以及较高的能源利用率。这里说的优化结构设计,从来不是说单一的机械结构改良,轮式机器人是一个综合性的系统,它涵盖了机械、电气、编程控制等方方面面的知识,因此在考虑结构设计优化的过程中,必然需要考虑相互联系的因素。例如在我们设计选择单轮、双轮、三轮移动式机器人时,就要考虑我的传感器布局是否能够与我的运动方案相适应。
1.2.2 多传感器信息融合
少量的单一的传感器获取的环境信息只能是周遭环境的局部信息,就如人感知环境需要通过视觉、听觉、 触觉等感官的共同配合,当机器人感知环境时,他们还需要整合多个传感器信息以更好地了解周围的环境信息。多传感器信息融合技术能将分布在不同位置的传感器信息提供的不完整的信息加以融合总结,补偿或降低单一传感器信息的不确定性,同时也能消除类似传感器之间的信息冗杂与矛盾,以此增加控制核心决策处理时的快速性、正确性和稳定性。总体而言,可将传感器大致分为内外部两类传感器,前者包括加速度和角加速度传感器、速度和角速度传感器、位置角度传感器等传感器,后者包括测距传感器、视觉传感器、触觉与接近感知传感器以及导航相关的传感器等。将这些传感器获得信息加以融合,常用的办法包括:加权求平均、贝叶斯推理与证据推理、神经网络和模糊推理法、统计决策理论等方法[4]。
1.2.3 导航与定位技术
导航与定位技术一直都是移动机器人发展过程中研究的重点。导航是机器人通过传感器系统认知自身所处的环境位置,并控制自身向目标方向移动的过程。时下,应用比较广泛的轮式移动机器人的导航方式有:通过与环境信息模型相互配对的导航、追踪环境路标信息的导航以及视觉导航、味觉导航等。在这些导航方式中,各自存在一定瓶颈,需要研究突破。诸如环境模型建造与匹配复杂、如何提高路标探测稳定性和鲁棒性,如何改善视觉导航里的图像处理实时性、以及气味传感器的性能还不能满足机器人控制运动的要求。 定位是导航实现的前提环节,只有知晓了自身位置,才能实现导航。定位的主要目的是通过传感器确立自身在一定的参考坐标系下的绝对位置。依据不同的环境,配备不同种类和数量的传感器以实现精准定位是研究的重点。一般而言有惯性定位、路标定位和GPS定位等定位方式。惯性定位会由于车轮打滑问题积累定位误差,使得车轮上的测速传感器测量误差不断增大而使定位不可靠;路标定位需要提前知晓环境信息并作标记,不属于真正意义上的自主定位导航;GPS定位不适用与隧洞、山洞等难以接受GPS信号的地方,而且对于工作在室内的机器人定位误差较大。
1.2.4路径规划
路径规划是轮式移动机器人以最快方式移动至目的点,躲避障碍物的关键技术。它是根据一定的性能指标搜索从初始状态到目标状态的最佳或近乎最佳的无碰撞路径。[5] 。根据机器人对环境信息掌握的情况多少可以将规划方式分为全局规划和局部规划,前者也称为静态规划,后者也成为动态规划。总体而言,路径规划分为大致三个步骤:首先建立环境模型,其次搜索路径,再平滑路径。因此,改善路径规划中任意一个步骤都讲极大优化路径规划的结果。目前采用的路径规划方法有:人工势场法、遗传算法、滚动路径规划等方法。
1.3 课题研究目的与意义
轮式机器人的多功能性和适用性给社会带来巨大的价值。它可以代替人类深入到各个领域的各个方面中,不仅提高了效率,还能减小一些危险因素对人类的影响。轮式机器人未来的发展前景是不可估量的,大到国家,小到公司都将轮式机器人的应用和发展作为核心发展战略之一。
单车智能泊车机器人作为轮式机器人的一种,在它的应用领域也发挥着不可替代的作用。共享经济的热潮会一浪接着一浪地掀起,随之带来的自行车堵塞交通的现象也是要着手解决的。单车智能泊车机器人能够高效地解决这一痛点,通过少量的单车智能泊车机器人自我识别单车、抓取单车、运输并停放单车,缓解交通压力,并降低自行车的损坏率,从而使共享单车进一步推广和服务于大众。此外,还可以发挥本机器人的通用性,即让机器人服务于类似场景中,仅通过改变几个接口或者变换一下控制程序,就能实现机器人的多场景应用。
1.4 课题研究主要内容
本课题研究并设计了单车智能泊车机器人的控制系统,其中包括控制系统控制方案设计、机器人硬件电路设计、PID控制算法研究以及控制系统软件设计与仿真调试验证。每一块内容随着不同的章节进行了不同论述:
第一张绪论介绍了轮式机器人的发展状况,细数了轮式机器人如果要有进一步的发展需要从哪些技术方面加以突破改进。
第二章方案设计论述了如何进行控制系统的实现,对主控芯片进行了选型,对控制系统中主要的功能传感器进行了选型。
第三章硬件电路设计在第二章方案设计的基础上,对应地设计各块电路,包括IO扩展电路,驱动电路,传感器电路,通信模块电路和电源电路以及一些其他外围电路,
第四章主要研究了控制算法PID控制,将PID控制算法应用到轮式机器人控制系统中。通过建立数学模型,再通过Z-N整定法,衰减比例法,试凑法寻找合适的PID控制参数。
第五章是程序设计,在硬件电路的基础进行各模块的程序设计意以实现特定的功能,包括PWM调速程序、超声波收发程序、寻迹程序、终端服务程序等。最后应用Proteus软件进行了仿真验证。
第2章 单车智能泊车机器人控制系统方案设计
2.1功能需求分析及实现思路
本控制系统的设计要求是为了实现单车智能泊车机器人能将随意停放的单车泊到适合指定的停车区域或者是智能单车库停车入口处。其基本设计要求为:对15kg以内的单车,在100m内的单车最初停放到规定位置的距离内能够在1-2分钟内完成泊车过程,机器人能够自主移动,避开障碍物。
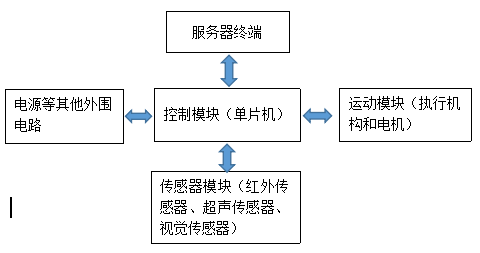
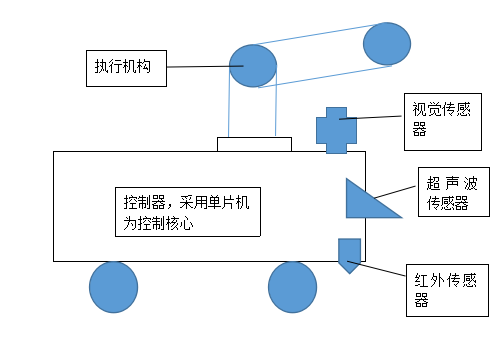 图2.1 控制系统结构示意图 图2.2 单元划分图
图2.1 控制系统结构示意图 图2.2 单元划分图
首先通过分析机器人需要实现的动作分析其应该实现哪些功能,机器人应首先能通过无线通讯接受总控制端口的命令,从而自主移动到大致位置,这过程包括使用红外传感器进行寻迹和超声波传感器进行躲避障碍,然后通过视觉传感器发现和识别单车,控制系统发送命令给执行电机装载单车,运输至指定位置,如图2.1所示。
将机器人应具备的功能进行模块化细分,如图2.2,控制单元应依次实现控制器的选型、控制算法的实施、控制电路的设计、控制程序的编写等。传感器单元应依次实现传感器的选用(采用哪种传感器)和选型(传感器性能分析)、传感器的布局等。运动单元应依次实现电机的选型、驱动电路的设计等。通信模块应实现传输协议的确定、I/O扩展。这之后再进行功能整合,即应对最后完成系统进行测试,采用matlab中的simulink进行仿真。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: