单车智能泊车机器人结构设计及分析毕业论文
2020-03-13 09:39:34
摘 要
共享单车的出现,对城市中长期以来占较大比例的机动车出行方式产生了明显影响,一定程度上提高了非机动车辆出行在城市出行中的占比,给人们生活带来极大便利的同时也对城市交通造成了一定影响。有些人在使用完共享单车后对其任意停放,对城市交通的正常有序进行造成了很大的压力且带来不可控的危险因素。
本文设计了单车智能泊车机器人来解决目前共享单车的乱停乱放问题 ,文章中从机械设计选型到三维建模,再到运动学仿真以及应力仿真,给出了一整套的关于单车智能泊车机器人的结构设计及运动分析方法。并可以为今后类似的自主移动搬运机器人设计研究提供一定程度上的借鉴。首先,根据所要达到的工作要求,确定了单车智能泊车机器人的构型方案,并根据设计要求将机器人的主要尺寸计算出来,然后选定驱动机构。利用Solidworks 软件将机器人的主要驱动部分的三维模型设计并立体直观的展示出来。通过详细计算得到智能泊车机器人所必需的主要部作参数,从而对所需零部件进行选型。最终将整个单车智能泊车机器人的三维立体模型完整的展现出来。其次,将模型进行一定的简化,充分利用有限元分析工具来对所设计的单车智能泊车机器人进行研究,保证单车智能泊车机器人的强度和设计寿命能够满足使用要求并且具有良好的动态特性,不易发生共振现象。最后,需在对单车智能泊车机器人运用所学知识进行详细的运动学分析基础上利用 D-H 运动学数学模型建立方法对智能泊车机器人分析计算并最终得到运动学的正解。
关键词:单车智能泊车机器人;结构设计;有限元分析;运动学仿真
Abstract
The emergence of shared bicycles has had a significant impact on the motor vehicle travel mode that has long accounted for a large proportion of the city’s long-term, to a certain extent, increased the proportion of non-motor vehicle travel in urban travel, and of course also caused certain urban traffic. influences. Shared bicycles are parked at random and hinder the orderly operation of urban traffic.
In this paper, a bicycle intelligent parking robot is designed to solve the current problem of random parking and sharing of bicycles. From the selection of mechanical design to three-dimensional modeling, to kinematics simulation and stress simulation, the article gives a complete set of intelligent information about bicycles. Structure design and movement analysis method of parking robots. And can provide a certain degree of reference for similar future autonomous mobile handling robot design research. First of all, according to the work requirements to be achieved, the configuration scheme of the intelligent parking robot for the bicycle is determined, and the main dimensions of the robot are calculated according to the design requirements, and then the drive mechanism is selected. The 3D modeling software Solidworks was used to design the main driving part of the robot. Through the calculation of the main parts of the operating parameters, and then complete the selection of parts. Finally, the three-dimensional model of the entire bicycle intelligent parking robot is obtained. Secondly, the model is simplified to make full use of the finite element analysis tool to study the designed intelligent parking robots, so as to ensure that the strength and design life of intelligent parking robots can meet the requirements of use and have good dynamic characteristics. Resonance does not occur easily. Again, the kinematics of the palletizing robot is analyzed, the kinematics mathematical model of the robot is established using the D-H method, and the kinematics forward and inverse solutions are analyzed and calculated.
Keywords: Bicycle smart parking robot ; Structural design; finite element analysis ; motion simulation
目 录
第1章 绪论 1
1.1 课题研究背景及意义 1
1.2 搬运机器人国内外发展及现状 1
1.2.1 搬运机器人国外研究现状 2
1.2.2 搬运机器人国内硏究现状 2
第 2 章 单车智能泊车机器人设计 3
2.1 单车智能泊车总体设计方案 3
2.2 单车智能泊车机器人零部件设计 3
2.2.1 驱动方式的确定 6
2.2.2 机械手臂的选型 7
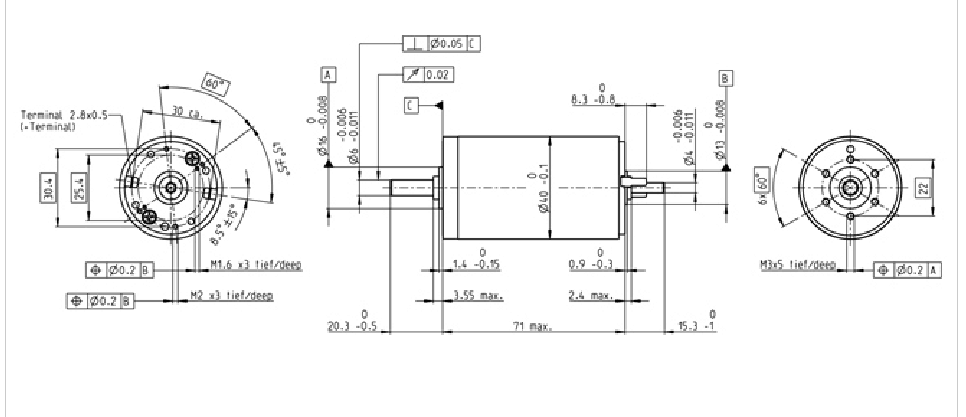
2.2.3 自主移动小车后轮驱动电机的选型 8
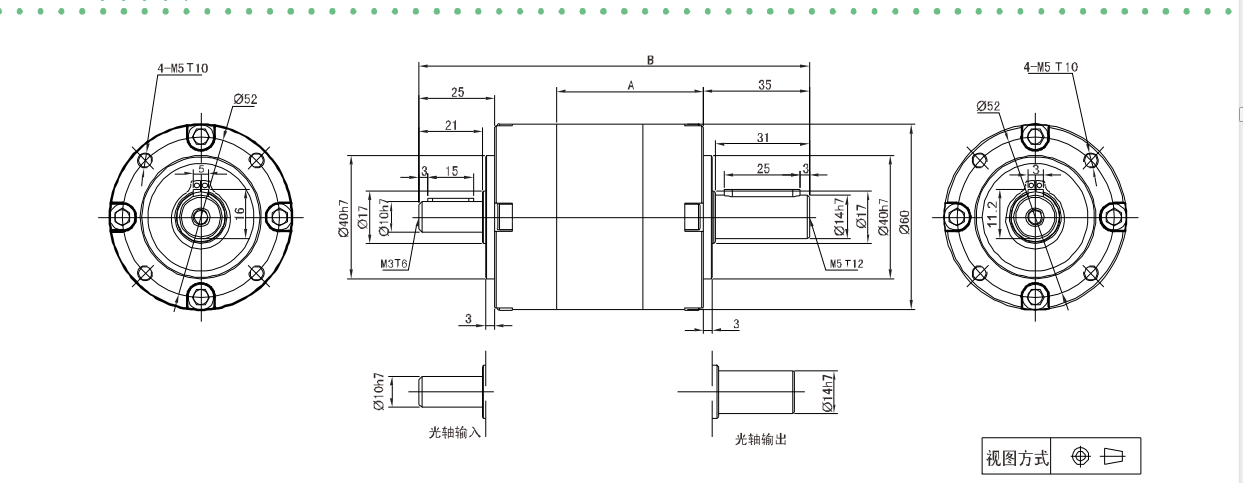
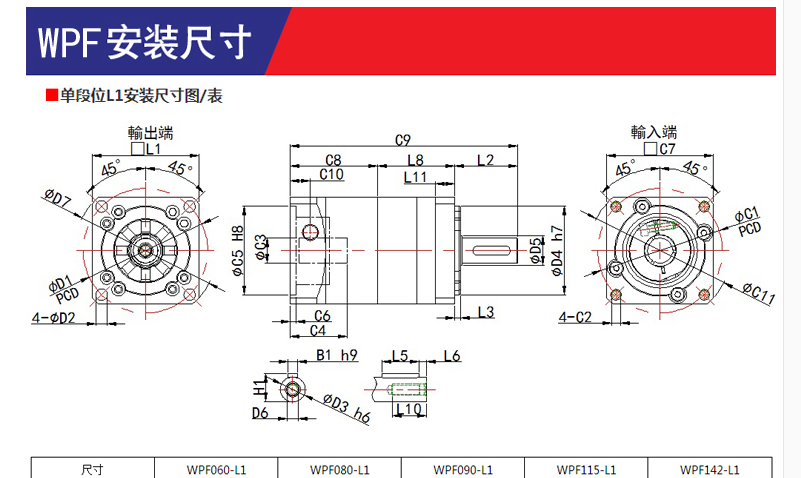
2.2.4 后轮驱动电机配套减速机的选型 9
2.2.5 后轮驱动轴的设计 10
2.2.6 自行车输送导轨驱动电机的选型 11
2.2.7 齿轮齿条的计算及选型 13
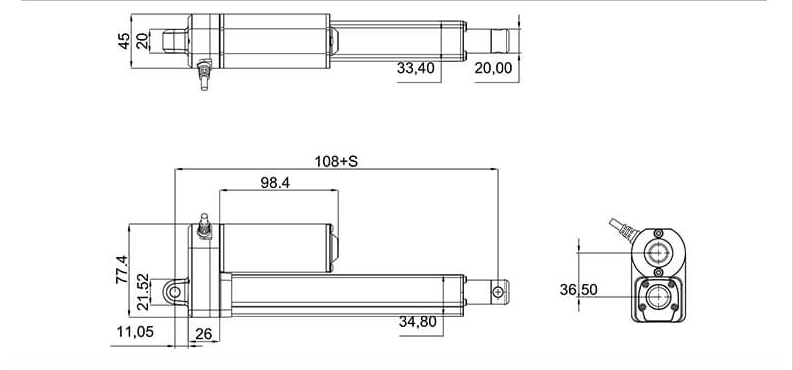
2.2.8 电动推杆的选型 14
2.2.9 机械抓手驱动电机以及配套减速机的选型与计算 15
第 3 章 单车智能泊车机器人主要部件的有限元分析 18
3.1车身的防倾覆校核 18
3.2 车身的分析 19
3.3 后驱转轴的分析 21
第4章 单车智能泊车机器人运动学分析 24
4.1 单车智能泊车机器人运动学分析 24
4.2 奇次坐标变换 24
4.3 D-H表示法 26
4.4 单车智能泊车机器人运动学正解 28
第5章 结论 30
参考文献 31
致谢 31
第1章 绪论
1.1 课题研究背景及意义
共享单车诞生于这个“互联网 ”高速发展的大背景下,将互联网技术与人们日常实际生活紧密地结合在一起,使不分年龄和社会阶层的城市居民均可以享受到其便利服务。它是我国经济发展到一定程度之后的产物,由它首先打开了共享经济时代的大门,向市民展现了共享思维模式,并且从中调节城市居民的出行方式。共享单车首先出现在大中型城市,其后服务范围逐渐深入到小城市。任何一个新型交通产物的出现总会伴随着一 些问题的接踵而至,从共享单车遭到一定数量的破坏从而体现一部分人素质问题到对城市交通的正常运行造成不良影响 问题,来自各界各方的不同的声音很多。如何改善并解决这些问题,将会对推进城市可持续发展、创造和谐的人文社会、构建良好的交通环境产生重要的作用。随着城市交通量的不断增长,许多大中城市将交通管理的重点放在机动车辆上,尤其是私家小轿车。共享单车的出现,对城市中长期以来占较大比例的机动车出行方式产生了明显影响,一定程度上提高了非机动车辆出行在城市出行中的占比,当然同时也对城市交通造成了一定影响。
由于共享单车属于公共资源,它停放自由,导致人们在使用过程中以自我方便为主,停放行为缺乏约束。目前城市道路经常出现共享单车停放在非机动车道的情况,或者停放在人行道上,更有甚者直接停放在车行道上。如果将单车停放在非机动车道上,将会导致非机动车、摩托车等车流向车行道方向挤压车行道,导致交通流变慢;如果随意地将共享单车无序停放在本应只允许人通过的人行道空间上,路过的行人由于没有足够宽敞空间用于行走,局部路段上一些人将会行走在非机动车道上,这种行为博弈给非机动车辆造成压力,这样一来又会导致非机动车为了躲避行人而挤压到机动车道,从而导致交通堵塞,行车变缓,同时大大增加了安全事故发生的可能性。
1.2搬运机器人国内外发展及现状
机器人是一种自动化装置,该自动化装置被广泛用于工业生产当中,它能够模仿并代替人做一些复杂,重复的工作。搬运机器人是机器人的一种,可以对其预先进行程序的编写,在生产中替代人搬运较重或需重复搬运的物品。一些发达国家早在上个世纪的工业生产中就大量引入了机器人,但搬运机器人的发展一直滞后,在搬运机器人被大量使用之前,一些繁重的工作仍然需要人工完成,不光效率低,而且浪费了大量劳动力。
如今国内外搬运机器人的发展到了一定的地步,搬运机器人被逐渐广泛的运用到各行各业,节省了大量劳动力用于做更多创造性的工作而不是浪费在不断重复,繁杂的事情上,未来国内外搬运机器人会更为广泛的应用。
1.2.1 搬运机器人国外研究现状
工业机器人最早起源于美国,随后发展到日本和欧洲,一些发达国家例如日本抓住了此次工业机器人发展的大好机会,政府对其进行大量投入,这使得日本的机器人行业发展一直处于世界领先水平,推动整个国家制造业的升级。如今各国都认识到了工业机器人对整个国家制造也发展的重要性,各国政府也都加大投资和投资优惠力度 。
。
被称为"机器人王国"的日本,近日,其一家公司生产了一种HOS巧智能搬运机器人,这种机器人搭配无线通信技术。系统控制中心能够每时每刻监测一定范围内所有搬运机器人的信息,这些信息包括搬运机器人的位置,传输回的影像以及工作状态。
德国也是工业机器人发展领先的国家,德国机器人的发展速度让许多国家叹为观止,在工业机器人创新和设计上一直引领世界。我们熟知的工业4.0的概念也是德国政府提出的,这至少表明了德国政府对制造业的重视,尤其在工业机器人这一方面。
德国对搬运机器人发展在未来尤其是在5G网络时代和物联网时代来临之际实现搬运机器人的互联互通,使之能更加高效,更为精密的做更多的工业搬运工作。
1.2.2 搬运机器人国内硏究现状
对于我国来说,工业机器人的发展较晚,但却是不间断,大力度,全方面、高效率的发展。中国制造2025中已经很明确的为中国制造尤其是工业机器人的发展制定了详细计划,这一计划也明确的暗示国家未来对工业机器人的强力支持,当这一计划被提升为国家战略时,其重要性和意义可想而知,也必须相信未来我国工业机器人的发展一定能完成已经预先制定的计划目标。
在国家的强力支持下,大量生产工业机器人的自主品牌以渐渐成长起来,在2015年,世界机器人大会上,作为本土工业机器人发展标志的一家合肥的智能机器人生产商展示了其开发设计的两款工业搬运机器人,其中一种甚至目前是世界上无论从智能化,搬运能力还是工作运行 的稳定性都处于世界领先水平。因其众多良好的特性,吸引了众多该行业同行的眼球,同行对其也是高度评价。
而在2015年,我国一家公司推出了一款新型搬运机器人。该搬运机器人的设计解决了先前众多搬运机器人难以解决的困难。体现了该搬运机器人的智能化、工作状态稳定和创新性。更为重要的是该搬运机器人独特的结构特性更好的满足在日常搬运过程中的实际需求,
第 2 章 单车智能泊车机器人设计
2.1 单车智能泊车总体设计方案
单车智能泊车机器人整体设计,首先要根据所给出的工作要求对单车智能泊车机器人结构做出初步规划,其中最为主要的是要详细考虑基于单车智能泊车机器人实用的结构功能基础上对其灵活和经济性等方面进行分析,进而确定单车智能泊车机器人的构型方案 。本章在确定单车智能泊车机器人工作要求及构型方案的基础上,确定了单车智能泊车机器人的基本尺寸,设计三维建模及主要部件的选型。
。本章在确定单车智能泊车机器人工作要求及构型方案的基础上,确定了单车智能泊车机器人的基本尺寸,设计三维建模及主要部件的选型。
本文中所设计的单车智能泊车机器人对于随意停放的单车,单车智能泊车机器人能够将单车泊到适合指定的停车区域或者是智能单车库停车入口处。设计要求:对15kg以内的单车,在3m*100m的单车最初停放到规定位置的距离内能够在1-2分钟内完成泊车过程,单车智能泊车机器人能够较为迅速的不需人为控制的自主移动且能较为准确合理地避开障碍物以防止碰撞。
设计参数:
1.额定泊车效率 : 40次/小时
2 .安装方式 :自主移动式
3 .承重能力(含手爪): 20kg
4 . 自行车尺寸: 26寸(车轮)共享单车
5 .动作范围 :自主移动小车:3m*100m(可实现90度转弯)
机械手臂:直径3m的圆周运动范围
6 .位置重复精度 ±0.5mm
7 .驱动能力:步进电机驱动(机械手臂,输送装置),直流电机驱动(自主移动小车)
8 .工作环境温度 -15℃~45 ℃
2.2 单车智能泊车机器人零部件设计
按照结构坐标系的差别,单车智能泊车机器人也呈现出类型上的差异。所谓单车智能泊车机器人的构型,就是指该种机器人的机械结构的配置方式,其中最为重要的是包含在智能泊车机器人的机械运动自由度、机械的主要关节的运动方式和机械零部件之间的相对运动关系以及位置关系等等。根据机械手臂坐标特性的不同机器人的构型可分成以下四种:直角、圆柱、球和多关节坐标型 ,如图 2-1。目前这四种构型的机器人被普遍应用于各行各业的各种工业流水线上面。可以根据不同的场合环境的要求,空间的限制,以及所搬运的物品的要求,选择出适当的机器人进行工作。
,如图 2-1。目前这四种构型的机器人被普遍应用于各行各业的各种工业流水线上面。可以根据不同的场合环境的要求,空间的限制,以及所搬运的物品的要求,选择出适当的机器人进行工作。
由于直角坐标型单车智能泊车机器人在笛卡尔坐标系中各个轴之间的运动是相互独立的,因此在进行运动分析时各个轴都可以单独处理的线性方程,因此在机器人投入到工作之前,对其运动进行计算控制的过程都是比较简单的,这是其他类别的机器人不具备的优势;这类机器人的刚性大,在执行任务过程中,机器人本身具有的精度不会因工作环境而改变,因此这类机器人在不同的工作环境中很容易能完成具有高精度要求的繁重任务且是许多人工无法完成的。但是由于机器人的各个轴相互独立,因此操作空间比较小,并且有着占地面积大、运行效率低、难以实现较为复杂的运动等不足之处。
对于圆柱坐标型的单车智能泊车机器人来说,该构型的机器人拥有一个中轴,此中轴可以让机械臂来回旋转进而可以满足比较苛刻的位置的工作要求。通过对机械臂的加长,机器人的工作范围可以相对扩大,且在机器人进行投入使用前对其进行运动的分析控制比较方便;采用液压传动装置对单车智能泊车机器人机械臂的直线部分进行驱动,这样既能够保证供给的动力能最大化满足任务要求又能保证运动过程的平稳性;但是由于机器人材料的强度限制,这种机器人的工作空间是一定的且很难进行扩大;单车智能泊车机器人机械手臂的直线驱动部分由于其结构的特殊性使得该种构型的机器人一般很难对其进行密封防尘处理,而且在机器人进行作业时手臂后端容易碰到在其工作范围内的其他物体,因此工作环境和工作条件对其运动的限制很大即该智能泊车机器人正常运行对工作条件和工作环境的要求较为严苛。
球坐标型单车智能泊车机器人的特点是它的机械臂能够绕其各自的中心轴旋转,因此能够完成到达各种苛刻位置,完成各种复杂任务的的要求。这类机器人工作时所等到达的空间范围比较广,机器人驱动部分具有很高的密封性;但坐标在机器人各部分的运动关系较为混乱,各部分机构在运转时可能会产生耦合现象,并且在投入使用前很难对机器人进行控制计算分析。密封困难和空间死区的问题仍然存在直线驱动装置中。
关节坐标型单车智能泊车机器人。关节坐标型单车智能泊车机器人不能够直观的解读其末端位姿,进行控制时需要求运动学的正反解,因此控制起来十分麻烦。虽然关节型机器人运动学比其他三种机器人相对复杂,但是它具有结构配合紧凑、运动起来十分灵活、有着极强的工作能力等优点,使得关节型的单车智能泊车机器人在各类工业生产线上作为高效的“搬运工”被广泛应用。
构型的选择对单车智能泊车机器人影响很大,因此在对单车智能泊车机器人构型选择上应求考虑周到,需要遵循的原则有如下几点:
(1)工作空间足够大。机器人通用性的强弱和在许多不同的严苛环境下的工作状况的好坏来自于机器人的工作空间,工作区间是指机器人机械臂的末端能够最大程度延伸到的所有位置的合集,大的工作区间保证了机器人能够出色地完成各种不同的工作要求 。因此,对单车智能泊车机器人进行设计和选型时因根据现实工作任务需求尽最大可能选择较为宽敞工作空间用来提高机器人的工作柔性以预防机器人在正常工作中会出现许多不可预知的新问题。
。因此,对单车智能泊车机器人进行设计和选型时因根据现实工作任务需求尽最大可能选择较为宽敞工作空间用来提高机器人的工作柔性以预防机器人在正常工作中会出现许多不可预知的新问题。
(2)机构设计必须合理。机器人的驱动方案很大程度上是由机器人各个关节的相对位置来决定的,不同的关节位置便会产生出各种各样的传动方案,大部分机器人在设计过程中都会将移动关节设计安装在基座附近,使机器人各个关节运动的配合更紧密,当关节距离基座较远时,可以设计添加相应的机械传动系统来传递机械臂执行任务时所需的运动和力。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
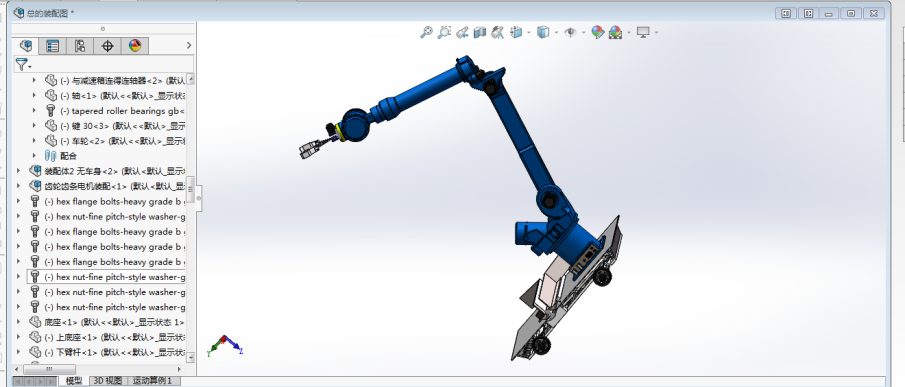
相关图片展示: