智能小车的感知与决策控制毕业论文
2020-02-17 11:00:08
摘 要
随着计算机科学和控制工程与技术的飞速发展,智能移动机器人技术逐步地在工业生产和日常居家出行的生活中扮演了重要的角色,包括室内服务机器人、自动驾驶技术、AGV,作为机器人学和人工智能领域的一个关键组成部分,移动机器人是最近几年来研究和发展的热门。移动机器人研究中,最重要的为同步定位与建图以及导航技术。本文将利用实验室现有的Dashgo D1两轮式差速小车为实验平台,通过机器人操作系统构建软件框架的,进行本课题的研究。
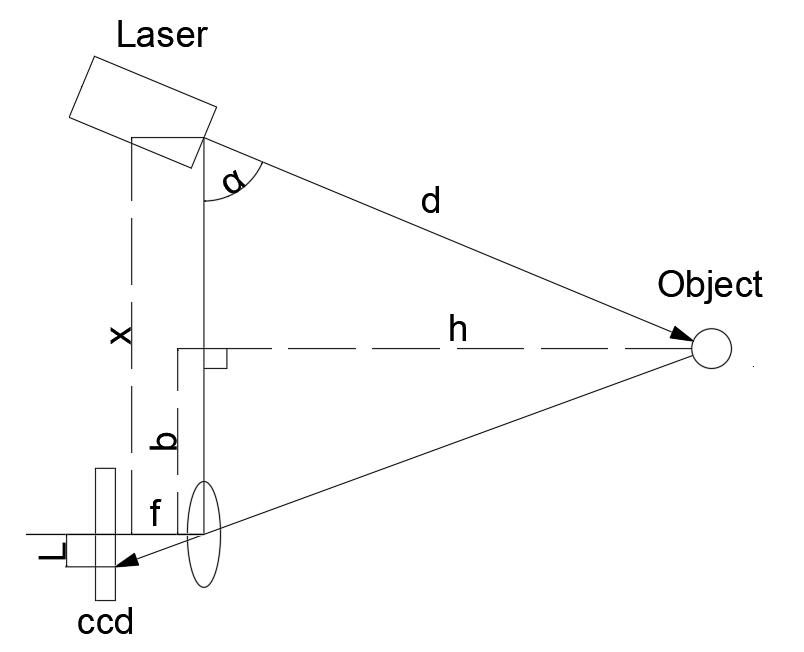
首先,搭建了小车的差分驱动模型、里程计运动模型以及激光雷达模型。在确定激光雷达模型时,考虑对比了基于TOF和三角法测距两种原理的激光雷达,选择了综合性能更佳的TOF激光雷达。
其次,提出了SLAM的概率模型,将问题简化为“估计”——“观测”——“校正”的研究历程。通过对两种具有代表性的开源建图算法——基于粒子滤波的Gmapping和基于图优化的Cartographer算法进行原理分析和实验对比,比较两者的特点和优劣性。
然后针对小车的导航问题,以全局路径规划和局部路径规划作为小车的路径规划算法两方面的问题进行介绍和分析。在全局路径规划中讨论了两种经典的全局路径规划算法Dijkstra和A*,通过一个仿真程序的执行速度和空间占用率对两者进行分析比较。针对局部路径规划,本文介绍了一种通过对一个全局路径规划器所产生的初始全局轨迹进行后续修改来优化小车的期望运行轨迹的TEB算法。最后利用teb_local_planner_tutorials中的插件进行仿真实验比较EB与TEB两种算法的区别。
最后在实际环境中通过Cartographer完成了实验场所真实环境的建图,基于已知地图,利用A*全局路径规划和TEB局部路径规划在实际环境中进行导航,经实验验证,该方案有效且具备一定稳定性。
关键词:移动机器人;SLAM;路径规划;ROS
Abstract
With the rapid development of computer science and control engineering, intelligent mobile robot technology gradually plays an important role in industrial production and daily travel, including indoor service robot autonomous AGV technology, as a key component of the robotics and artificial intelligence, mobile robot is popular in recent years’ research and development of mobile robot study, the most important is simultaneous localization and map building and navigation technology. This article will use the laboratory existing DashgoD1 two-wheel differential vehicle as the experimental platform, and the software framework is constructed through the robot operating system to carry out the research of this topic.
First, the differential drive model, odometer motion model and lidar model of the car were built. In the determination of the lidar model, the laser radar based on the two principles of TOF and triangulation is considered, and the TOF laser radar with better comprehensive performance is selected.
Secondly, the probability model of SLAM is proposed, which simplifies the problem into the process of “estimation” – “observation” – “correction”. By comparing the principle analysis and experimental comparison of two representative open source mapping algorithms, Gmapping based on particle filtering and Cartographer based on graph optimization, the characteristics and pros and cons of the two are compared.
Then the global path planning and local path planning are introduced and analyzed for the navigation problem. Two classical global path planning algorithms Dijkstra and A* are discussed in the global path planning. For local path planning, this paper introduces a TEB algorithm to optimize the desired trajectory of the car by modifying the initial global trajectory generated by a global path planner. Finally, the plug-in of teb_local_planner_tutorials is used to do the simulation experiment and compare the difference between EB and TEB algorithms.
Finally, in the actual environment, the Cartographer was used to complete the environmental construction of the experimental site. Based on the known maps, the A* global path planning and the TEB local path planning were used for navigation. The experimental results show that the scheme is effective and has certain stability.
Key Words:mobile robot; SLAM; path planning; ROS
目 录
第1章 绪 论 1
1.1 研究背景及意义 1
1.2 国内外研究现状 1
1.2.1 国外研究现状 1
1.2.2 国内研究现状 3
1.3 研究内容和目标 3
第2章 移动机器人系统建模 5
2.1 引言 5
2.2小车运动学模型 5
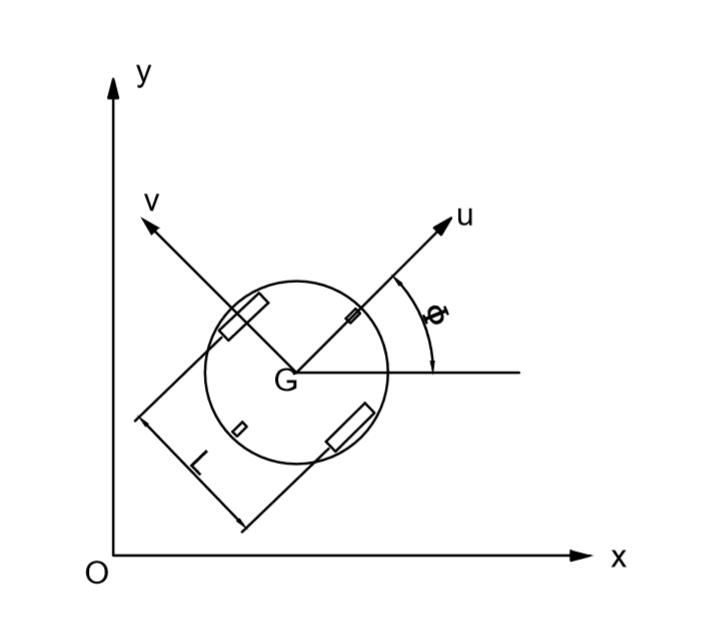
2.2.1 差分驱动模型 5
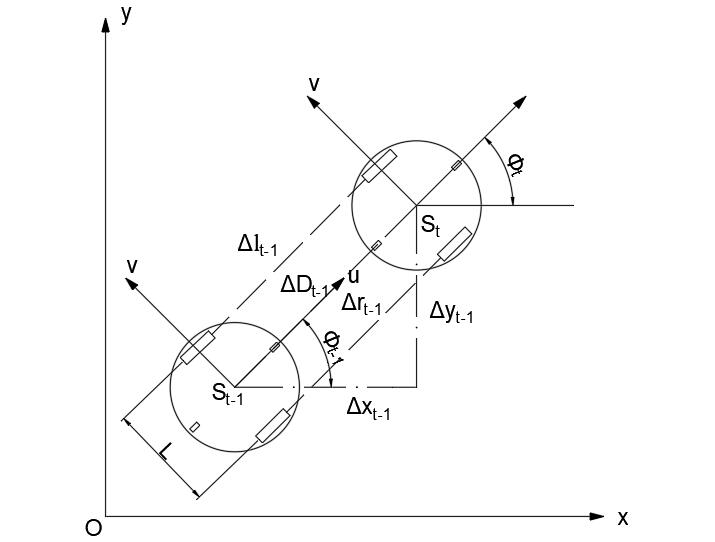
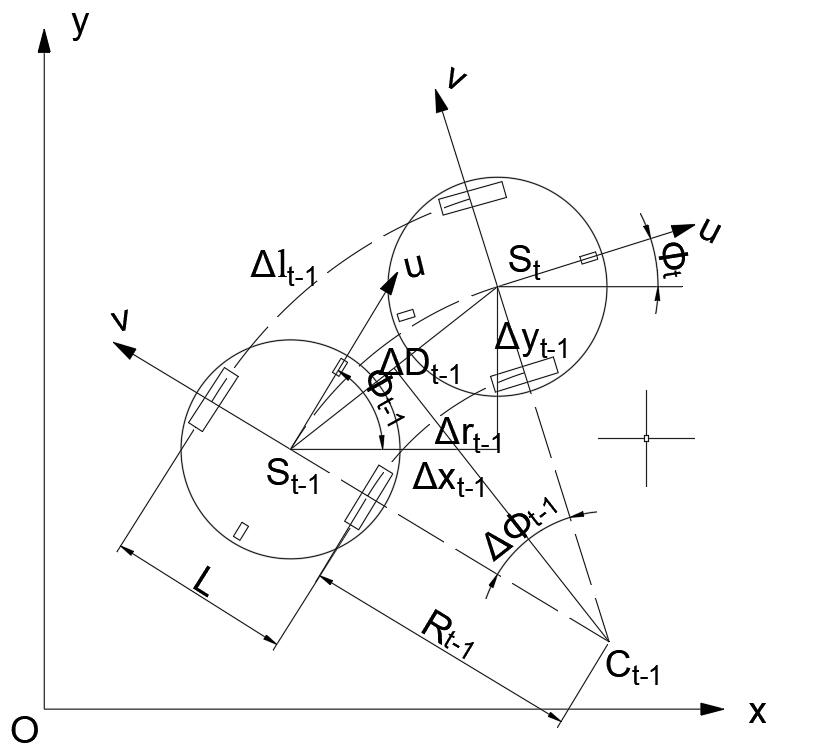
2.2.2 里程计模型 7
2.3 激光雷达模型 11
2.3.1 概述 13
2.3.2 数据分析 14
2.4 本章小结 14
第3章 实时定位与地图构建 16
3.1 引言 16
3.2 基于RBPF(Rao-Blackwellized Particle Filter)的方法 17
3.2.1 粒子滤波PF 17
3.2.2 FastSLAM 21
3.2.3 Gmapping建图 24
3.3 基于图优化的方法 25
3.3.1 GraphSLAM 原理 25
3.3.2 非线性最小二乘 26
3.3.3 非线性最小二乘在GraphSLAM中的应用 27
3.3.4 Cartographer建图 30
3.4 实验验证 30
3.5 本章小结 32
第4章 路径规划 33
4.1 引言 33
4.2 全局路径规划 33
4.2.1 Dijkstra算法介绍 33
4.2.2 A*算法介绍 35
4.2.3 估价函数 37
4.2.4 对比仿真实验 38
4.3 局部路径规划 40
4.3.1 EB算法 40
4.3.2 TEB算法 42
4.3.3 g2o图优化 49
4.3.4 仿真结果 50
4.4 本章小结 51
第5章 实验平台及实验结果 53
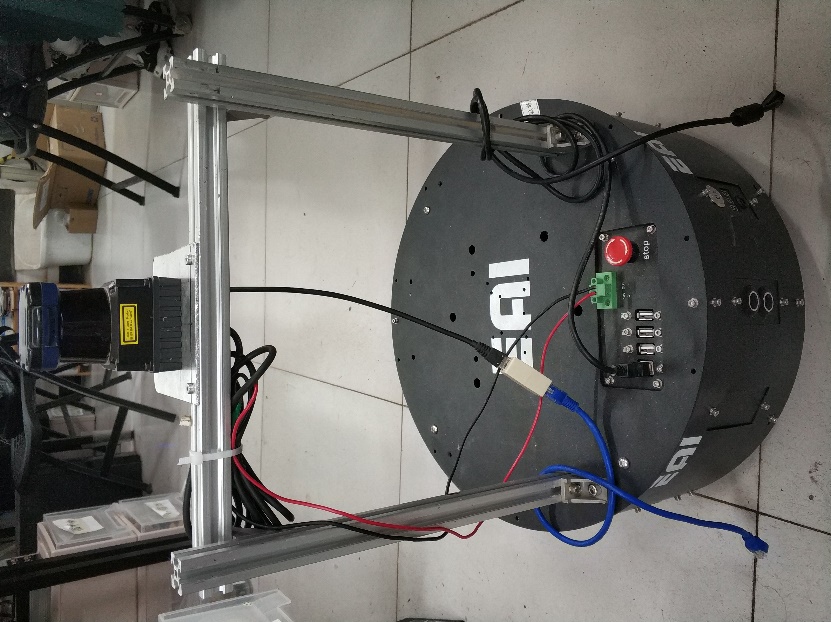
5.1 硬件平台 53
5.1.1 实验环境 53
5.1.2 硬件平台 53
5.2 软件平台 54
5.2.1 ROS系统简介 55
5.2.2 ROS基本术语 55
5.2.3 ROS特性 56
5.2.4 其他工具 57
5.3 真实场景的SLAM与导航 59
5.3.1 同步定位与建图(SLAM) 59
5.3.2 基于已知地图的导航 60
5.4 本章小结 62
总结与展望 63
参考文献 65
致 谢 67
第1章 绪 论
1.1 研究背景及意义
在新的时代浪潮下,人工智能与模式识别等技术飞速发展,智能移动机器人已经正式进入了工业自动化和人类日常生活等各个领域。移动机器人是一个集合了环境探索,动态计算和判断,行为控制等多种功能于一体的综合自主控制系统[1]。在生活服务领域,扫地机器人、救援机器人等带来了极大的便利;在工业生产中,自动导引运输车(AGV)[2]大大提高了加工对象和产品的运输效率;在智能交通的发展前景下,无人驾驶技术发展快速,未来将为人类带来安全、舒适、高效的出行体验;在军事领域,军用机器人已基本具备侦察、运输甚至代替人类士兵执行相关作战任务的能力[3];在太空探索领域,“玉兔二号”月球车可以在月球复杂恶劣的环境下自动执行探测和避障任务,从而代替人类科学家进行各种科研活动。智能移动机器人正在朝着智能化、自主化的方向发展,相关领域的研究和探索将会对社会乃至自然产生愈加深远的影响。
目前,智能移动机器人需要具备自主移动能力和对周围环境变化的适应能力,与此同时还应该具备与其他设备进行信息交互能力,即自主性、适应性、交互性[4]。机器人的自主性是指不靠外界被动控制,根据内部程序指令,自主地在对外部环境进行感知后执行相应的动作和任务。适应性是指,机器人应依靠其携带的传感设备对外部环境的变化如变道、障碍等做出合理的调整,正常完成工作任务。交互性是指,机器能与人类或者其他机器设备进行通信或交互,从而返回数据或者接收新的指令。对于智能移动机器人来说,实现智能化和自主化的前提和关键性技术在于定位和导航。
近年来,关于机器人定位导航技术得到了全世界各大科研机构的广泛研究,诞生了多种多样的解决办法。在众多的研究方法中,同步定位与建图(SLAM)算法是目前在移动机器人定位、地图建立中最为经典和实用的一种方法[5]。在移动机器人的应用和研究中,同步定位与建图技术起着决定性的作用,是整个系统的关键步骤,可以提高移动机器人的在未知的复杂的环境下进行自主定位的智能化程度和自主决策能力。同时,也是进一步基于已知地图而进行导航的基础和先决条件。
1.2 国内外研究现状
1.2.1 国外研究现状
国外机构对于移动机器人的研究和探索的时间较早,Shakey是世界上第一台实际意义上的移动机器人(图1.1)[6],其首次具备了自主进行感知和探索、环境建模、运动规划以及执行任务的能力。虽然从如今看来, Shakey的功能还较为简单而又笨拙,但 Shakey的成功研制开启了一个全新的研究领域,其理念在此后的移动机器人领域的研究和发展中扮演了重要的角色。如今,很多相关的SLAM和路径规划算法已经被国外的科研人员在多种环境下验证。其中,在经典的室内环境中,ROS开发者已经将基于Rao-Blackwellized粒子滤波的SLAM算法改进并且收录为Gmapping功能包[7]。如今Gmapping已经成为了激光2D-SLAM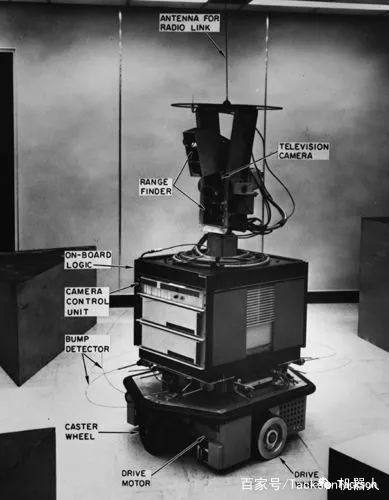 使用最广泛的算法。
使用最广泛的算法。
图1.1 Shakey自主移动机器人
此外,在具体的导航工作中需要基于已知地图进行路径规划,相应的算法也是层出不穷,不少高效且成熟的路径搜索算法已经在具体应用中取得了不错的效果,例如Dijsktra算法和A*算法。
 此外,随着高性能激光雷达的发展,2007年,顶级自动驾驶激光雷达研发商Velodyne便推出了其64线激光雷达,再至如今的128线数的雷达,传感器获得的数据急剧增长,同时也造成了价格的昂贵以及对计算平台提出了更高的要求此外,混合固态激光雷达的研发也在为投向市场而努力。同时在SLAM领域中与激光雷达方案并驾齐驱的还有基于深度相机的视觉SLAM,其中最经典的就是微软公司研发的Kinect深度相机(图1.2),其在获取平面RGB图像的基础上还能得到深度信息,价格低廉。
此外,随着高性能激光雷达的发展,2007年,顶级自动驾驶激光雷达研发商Velodyne便推出了其64线激光雷达,再至如今的128线数的雷达,传感器获得的数据急剧增长,同时也造成了价格的昂贵以及对计算平台提出了更高的要求此外,混合固态激光雷达的研发也在为投向市场而努力。同时在SLAM领域中与激光雷达方案并驾齐驱的还有基于深度相机的视觉SLAM,其中最经典的就是微软公司研发的Kinect深度相机(图1.2),其在获取平面RGB图像的基础上还能得到深度信息,价格低廉。
图1.2 微软Kinect深度相机
1.2.2 国内研究现状
国内在移动机器人及其相关领域的研究相比国外较晚,但是最近这些年来发展快速,多家研究机构和高校实验室推出了自己的机器人平台,如上海交通大学研发的Frontier机器人[8],国防科技大学推出的Nu Bot机器人[9],以及哈尔滨工业大学与中国科学院机器人学开发研究室联合开发的MROCAS(Multi-Robot Cooperative Assembly System)[10]。
在算法方面,国内的很多高校和科研机构都展开了研究,中国科学技术大学的汪洋提出了一种基于单目视觉的室内定位算法,针对天花板高度及装饰的不同,给出了一种自适应特征点提取的算法[11];针对目前2D激光SLAM无法同时协调建图精度与高额计算复杂度矛盾的问题,刘定广提出了一种BreifSLAM算法,在保证地图边界分辨率和精度的情况下,计算资源消耗更少[12]; 任祥华设计了改进的ICP算法和激光雷达点云的帧间ICP匹配算法[13]。
在硬件层面,随着思岚科技、镭神、砝石等国产激光雷达制造商的努力,一批具有高性价比的激光雷达投向了市场,对移动机器人甚至无人驾驶领域的发展起着推动作用。
1.3 研究内容和目标
本文将基于ROS (机器人操作系统)并结合SLAM算法、路径规划算法实现一款智能小车在简单环境下自动定位、导航和行驶。具有构建简单环境下的二维地图、定位、自动导航和躲避障碍的功能。通过查阅文献了解智能小车定位、导航的原理和实现过程,学习各种算法的原理及特点,采用国外开源的项目和软件平台,进行小车控制算法的仿真研究以及实车验证。其内容主要按照下列几个方面进行展开和论述:
第1章为绪论,主要介绍论文研究的背景和意义,以及国内外在相关领域的研究成果,并且介绍了论文的结构安排。
第2章对小车进行建模,主要对小车的运动学模型、里程计模型以及传感器的观测模型的数据处理进行了介绍和分析。
第3章介绍了实时定位与建图算法,并对两种具有代表性的开源SLAM算法:Gmapping和Cartographer分别进行分析和建图实验对比。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: