智能小车行驶系统设计毕业论文
2020-02-17 11:00:02
摘 要
智能车技术已成当前热门,实验室内通常使用智能小车作为实验平台,本文介绍一套智能小车行驶系统的设计流程。文章以国内外研究现状为起,调研智能车辆技术发展现状,分析确定本小车设计要求;详细介绍了车架结构、驱动系统、转向系统以及底层控制系统的设计过程。
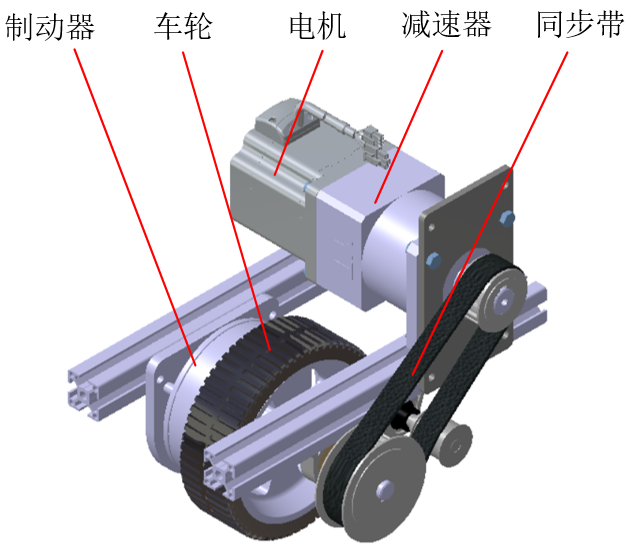
该小车以铝型材为框架,将整车分为三个模块,采用前轮转向、后轮集中式驱动、电池中置的整车布置方案,采用单后轮驱动以解决转向差速问题。驱动系统以电动机为动力来源,同步带传动方式实现传动,能够保证传动精度的前提下降低噪音,配备了失电制动器,保证紧急情况车辆安全,并对驱动轴进行强度校核。转向系统采用整体式转向梯形,利用舵机提供转向动力。设计时,根据转向梯形评价函数,利用MATLAB辅助计算,对梯形参数进行优化设计,根据转向机构空间关系,建立了舵机转角和车轮转角的数学关系,并针对转向节进行应力分析。文章最后介绍了以STM32控制板为核心的控制系统硬件组成、测速原理、电机控制特性、速度和转向控制算法,利用PID控制算法,实现速度控制,脉宽调制实现舵机角度控制。
关键词:智能小车;驱动系统;运动控制;
Abstract
Smart car technology has become a hot topic. The smart car is usually used as an experimental platform in the laboratory. This paper introduces the design process of a smart car driving system. Based on the research status at home and abroad, this paper investigates the development status of intelligent vehicle technology, analyzes and determines the design requirements of this car, and introduces the design process of frame structure, drive system, steering system and bottom control system in detail.
The car is framed by aluminum profiles, and the whole car is divided into three modules. It adopts front wheel steering, rear wheel centralized drive, and battery-mounted vehicle layout scheme, and adopts single rear wheel drive to solve the steering differential problem. The drive system uses the electric motor as the power source, and the synchronous belt transmission mode realizes the transmission. It can reduce the noise under the premise of ensuring the transmission precision. It is equipped with a power-off brake to ensure the safety of the vehicle in an emergency situation and to check the strength of the drive shaft. The steering system uses an integral steering trapezoid and uses the steering gear to provide steering power. In the design, according to the steering trapezoid evaluation function, the MATLAB auxiliary calculation is used to optimize the trapezoidal parameters. According to the spatial relationship of the steering mechanism, the mathematical relationship between the steering angle and the wheel angle is established, and the stress analysis is carried out for the steering knuckle. Finally, the paper introduces the control system hardware composition, speed measurement principle, motor control characteristics, speed and steering control algorithm with STM32 control board as the core. The PID control algorithm is used to realize speed control and pulse width modulation to realize steering angle control.
Key words: Smart car; drive system; motion control;
目录
摘要 I
Abstract II
目录 III
第 1 章 绪论 1
1.1 引言 1
1.2 国内外研究现状 1
1.2.1 国外研究现状 1
1.2.2 国内研究现状 2
1.3 设计目标分析 2
1.4 本文主要内容 3
第 2 章 车架设计 4
2.1 外廓尺寸确定 4
2.2 轴距和轮距确定 4
2.3 车架布置形式 5
2.4 本章小结 5
第 3 章 驱动系统设计 6
3.1 驱动方式选择 6
3.2 驱动电机选择 8
3.3 传动形式设计 9
3.4 小车运动分析 12
3.4.1 驱动力分析 12
3.4.2 最高车速计算 14
3.4.3 计算最大爬坡度 14
3.4.4 最大加速度 14
3.5 制动机构设计 15
3.6 驱动轴校核 15
3.7 电池参数计算 16
3.8 本章小结 16
第 4 章 转向机构设计 17
4.1 转向梯形设计 17
4.2 舵机选择 22
4.3 转向节设计 24
4.4 本章小结 25
第 5 章 驱动控制系统设计 26
5.1 控制系统硬件组成 26
5.2 软件开发平台 26
5.3 驱动系统控制 27
5.3.1 直流无刷电机特性 27
5.3.2 PWM调速原理 28
5.3.3 测速方法 29
5.3.4 控制算法 29
5.4 转向系统控制 30
5.5 本章小结 31
第 6 章 总结和展望 32
致谢 33
参考文献 34
附录 A 36
绪论
引言
现如今,人民生活水平不断提高,汽车已经成为最常见的代步工具。汽车总量不断增长,与之而来的,是交通安全事故频发、能源消耗量增加、环境污染日益严重。目前,车辆上广泛搭载数种被动安全技术,但却无法从根本上解决交通事故的发生[1]。据统计,因驾驶员操作失误导致的交通事故占55%-90%[2],同时,汽车尾气排放被认定为城市大气污染的主要污染源。因此,发展智能汽车和低污染的电动汽车来解决上述问题显得尤为重要[3][4]。
智能小车,具备环境识别、自主决策及主动驾驶等多种功能,是一个集各种高科技和创新技术为一体的智能设备, 包括对不同环境的感知技术、路径规划技术、智能驾驶技术等[5]。面对复杂的路况,智能小车能够自动提取所需信息,识别道路环境,能够自主规划行驶路径,或者按照预设道路或轨迹行驶[6]。现如今,智能小车应用广泛,它的技术进步将受益于各行各业。它的研究对于智能驾驶、物流运输、外太空探测等都有重大意义。例如,可以代替人在仓库搬运东西,减轻人的负担;将无人驾驶的车辆投入到生产线、服务业,提高生产效率,降低人力资源使用[7];应用于环境探测任务中,将人从危险环境中解放出来;应用到外太空探索中,推动科学研究进步。目前,阿里、京东等较大的电商、物流企业,已经开始无人车送货或无人机送货的测试研究,已在多地进行试验。
国内外研究现状
国外研究现状
智能车方面的研究,国外从上世纪六七十年代就已开始。1966年至1972年,Shakey自主移动机器人,在斯坦福研究院问世,其采用两轮驱动方式,并安装了脚轮辅助平衡。进入80年代,美国国防高级研究计划局,提出了室外移动机器人的规划,无人作战平台的研究逐步开始。1995年,一项横穿美国东西部的实验,由Navlab2V无人车顺利完成,该车由卡耐基梅隆大学开发。Navlab2V无人车在东西部之间的洲际高速公路上行驶了约5000km路程,其中无人车以最高车速为50km/h的时速自主行驶了至少96%的路程,该项实验的成功标志着智能车技术的巨大进步,但本次实验中车辆仅自主完成方向控制,不进行速度控制[8]。2002年,Roomba机器人问世,该机器人由一家丹麦公司设计,采用两轮驱动方式,可以进行自主避障和自主规划运动路线,并且能够自行充电[10]。2003年,国外开发者Kiva针对大型物流仓储管理场景,设计了一款能在定点之间来回移动并且具有负载能力的智能小车,该小车采用两个电机配合减速箱的轮边驱动方式,该小车可以由两个定制车轮组成的差分结构实现原地转向。在2009年,斯坦福大学最新开发出的Shelley智能车,在GPS导航的基础上,实现了路径跟踪和在道路行驶功能[11],并且达到193km/h的最高行驶速度。近几年,特斯拉以及科技行业巨头谷歌公司自主研发的无人驾驶汽车已经在美国公路上测试。该车配备了位置评估器、GPS、激光雷达、高清CCD摄像头等传感器实时地监测周围道路情况 [12],车辆采用分布式轮毂电机驱动。
国内研究现状
与国外相比,国内相关研究在上世纪九十年代初期开始,起步较晚,但也取得了一定的成果。1991年至1995年,我国第一台无人驾驶车ATB-1研制成功,标志着我国初步形成了智能车辆技术基础。2003年,一汽集团和国防科技大学共同研发了一款无人驾驶汽车,该车基于一款红旗轿车进行改装,配备了雷达和摄像头,能够实时检测周围道路信息,自动控制车辆行驶,并实现自动超车功能[13]。2005年,鲁能智能技术有限公司和山东电力研究院共同开发了一台巡检机器人,该机器人通过识别地面上布置的电磁轨迹和射频识别(RFID)标签,能够实现最优路径规划和双向行走。2015年12月,百度公司研制的无人驾驶汽车实现了综合道路环境下的自主行驶[14]。2017年10月,由中车株洲电力机车研究所研发的智能轨道快运系统在株洲亮相,该系统融合了公交车和有轨电车的优点,采用了车辆系统集成、轨迹跟随控制等多种核心技术。2018年,北京中云智车团队研发出了全国第一款无人驾驶小车辆通用底盘,该车将线控化、模块化、集成化、通用化特点放在首位,提供了一套完整的智能小车底盘方案。
综合国内外现状,智能车已经有多种多样的应用,各场景下的智能车驱动方式也不尽相同,有的基于传统动力车辆改装,有的采用两轮驱动等等。实验室环境下,前轮转向后轮驱动的形式更具有普适性。
设计目标分析
本设计智能小车采用电驱动方式,以电池为能量源,电机为动力单元。城市铺装道路、高速公路和特殊环境道路是目前智能车辆的主要行驶工况。本智能小车主要针对校园内良好铺装的沥青路面,设计初期对小车提出100kg的负载要求。同时,为方便后期实验设备的安装,该小车应具有良好的扩展性。
智能小车的底层控制可分为横向控制和纵向控制两个部分,实现小车速度和方向的控制是实现自动驾驶的基础。针对小车驱动系统,应使小车能达到10km/h的车速,能够达到最高车速以下任意设定车速并稳定行驶,爬坡能力超过7%。针对小车转向系统,应使小车转向尽可能灵活,有较小的转弯半径,能使转向轮达到设定转角。
本文主要内容
本文针对一款智能小车行驶系统的设计过程进行详细介绍,包括结构设计、控制系统设计及算法介绍。
第一章介绍了智能车的发展背景以及国内外研究现状,分析确定了小车的设计目标。
第二章介绍了小车车架的设计流程,确定了小车基本外廓尺寸、轴距、轮距等参数。
第三章介绍了驱动系统的设计,包括驱动形式的选择、小车动力分析、电机选型、制动机构设计、电池参数计算等,并对驱动轴进行强度校核。
第三章介绍了转向系统的设计,包括转向形式选择、梯形参数优化、转角数学关系、转向节强度校核等。
第四章介绍了控制系统的整体设计,包括控制系统软硬件平台、电机和舵机控制原理及控制方法等等。
车架设计
本智能小车车架由30mm铝型材和角码组装而成,具有结构轻巧、强度高、成本低、组装灵活性高等特点,能够满足实验设备安装及一定的承载需求。车架结构如图2.1所示。
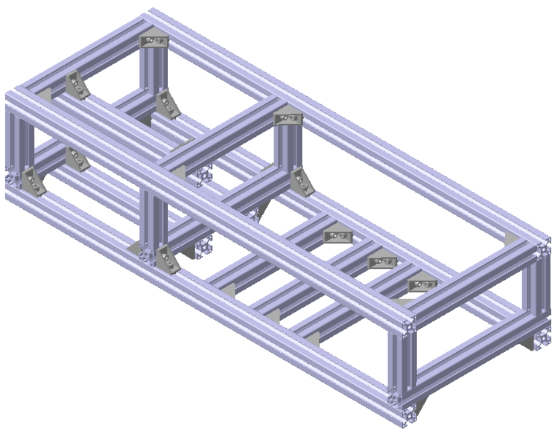
图 2.1 智能小车车架设计图
外廓尺寸确定
小车的长、宽、高称为小车的外廓尺寸。本智能小车为电驱动方式,应搭载驱动电机、电池、转向机等部件,应根据各部件结构尺寸,确定小车整体结构尺寸。本设计采用的电池尺寸为280mm*150mm*90mm,驱动电机尺寸为94mm*80mm*80m,车轮选用直径为150mm的橡胶AGV驱动车轮,车架还应预留足够空间安装转向机构。根据上述部件尺寸,确定车架长度为800mm,宽度为300mm,高度为120mm。
轴距和轮距确定
轴距L和轮距B是小车的两项基本参数。改变小车轴距对整备质量、最小转弯半径、传动系长度、纵向通过半径等参数都影响,考虑到本小车主要在试验场行驶,将小车的灵活性放在首要位置,结合车身长度,将小车轴距确定为560mm。轮距对小车总质量、总宽、最小转弯半径等参数有影响。轮距增大,横向稳定性增加,小车的宽度、总质量及最小转弯半径随之增加,机动性下降。考虑到小车质心较低,为提高灵活性,应使轮距尽量减小,最终确定车轮轮距为340mm。
车架布置形式
如图2.1所示,4根长为800mm的铝型材作为车架主体,起主要承载作用。横向布置的铝型材将车架分为前后三个部分,分别安装转向和驱动机构、电池以及其他控制硬件。方形框架对小车内部元器件起到一定保护作用。
本章小结
本章首先介绍了车架的整体布置形式,车架使用铝型材搭建,分为三个部分。确定了小车的外廓尺寸为800mm*300mm*120mm,根据外廓尺寸,确定了小车的轮距340mm,轴距为560mm。
驱动系统设计
驱动方式选择
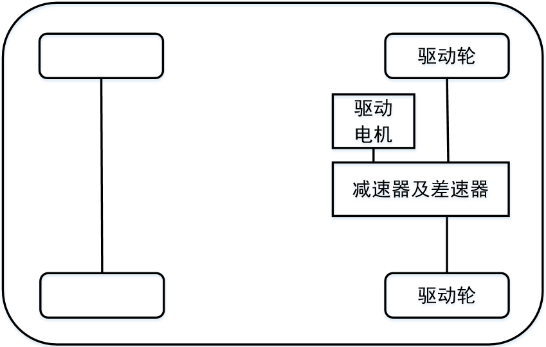
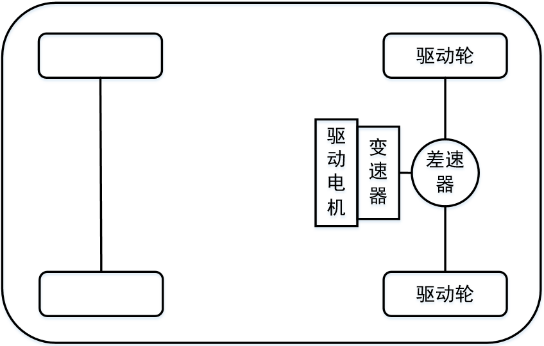
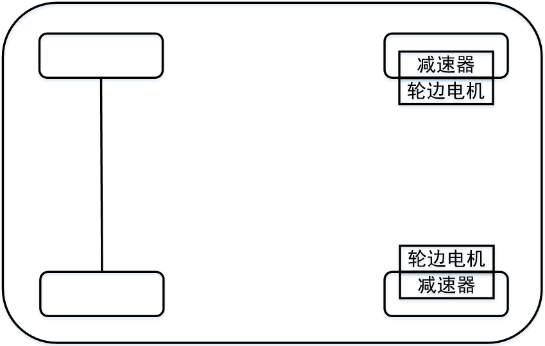
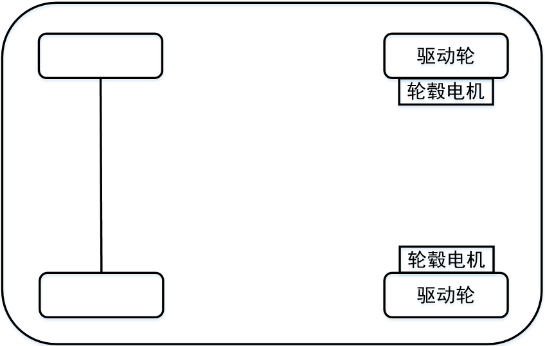
电动车辆驱动系统布置形式种类较多,可根据驱动轮位置和数量、驱动电机布置方式进行分类。为方便布置,后轮驱动方式,常被应用在体积不大的电动小车中。根据驱动电机的布置方式不同,可分为电机集中式、轮毂电机式、多电机式三种[15],如图3.1所示。也有学者将其分为集中式驱动和分布式驱动[16]。
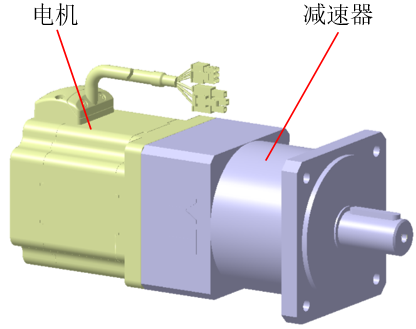
传统驱动布置形式,如图3.1(1),属于电机集中形式。该形式动力传输路线与传统内燃机车辆基本一致,例如变速器、离合器等传动部件齐全,驱动桥结构与传统内燃机车辆相比,也未发生变化,相当于用电动机代替了原来的内燃机。该驱动形式适合针对传统车辆进行改造,移植部分成熟技术,降低成本和开发周期,简化控制策略,车辆配备的减速器也能够增加驱动电机的速度控制范围,提高低速动力性。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: