微型无人驾驶电动物流车制动系统设计毕业论文
2020-02-17 10:54:36
摘 要
近年来,随着物流货运的人力成本逐渐增大,为了降低成本,车辆的无人驾驶技术在物流货运配送领域发展迅速,在实现普及化的同时对车辆的安全性能、结构设计提出了新的要求。制动系统是车辆行驶的安全保障,因此本文是对微型无人驾驶电动物流车制动系统的研究设计。
根据制动系统的研究发展现状,比较了国内外在该方向上做出的成绩,总结其研究成果,选择技术较为成熟的线控液压盘式制动系统。根据车辆参数,对制动过程进行行驶动力学分析,以及对制动轮缸、主缸的动力学分析,完成整个制动系统的理论计算。结合法规要求,确定了液压系统的具体参数,并且利用MATLAB/GUI界面进行参数化设计。接着,选择通过滚珠丝杠、推杆机构实现对车辆液压制动系统的控制,设计一套以无刷直流电机作为动力,经减速器减速增矩的执行机构。本次设计创新在于减速器输出轴直接通过键和滚珠丝杆连接,取消了连轴器。最后根据整体系统的尺寸要求,对主要结构元件的结构尺寸和安装尺寸进行优化,保证以最小的空间占比满足最大的性能需求。
本文仅对其机械结构进行初步的设计,今后还可以从结构一体化、模块化设计展开深入研究,设计出符合更多车型的制动系统。同时对GUI的界面编辑能够更加多样化、系统化,增加更多制动系统参数计算和校核的功能。
关键词:微型;无人驾驶;物流车;线控液压制动;参数化设计
Abstract
In recent years, as the human cost of logistics and freight gradually increases, in order to reduce the cost, the unmanned vehicle technology has developed rapidly in the field of logistics and freight distribution. While realizing the popularization, it puts forward new requirements for the safety performance and structure design of vehicle. Braking system is the safety guarantee of vehicle running, so this paper is the research and design of the braking system of micro unmanned electric logistics vehicle.
According to the research and development status of braking system, this paper compares the achievements made in this direction at home and abroad, summarizes the research results, and selects the wire control hydraulic disc braking system with relatively mature technology. According to vehicle parameters, analyze the driving dynamics of the braking process, as well as the dynamics of the brake wheel cylinder and the main cylinder, to complete the theoretical calculation of the entire braking system. According to the requirements of regulations, the specific parameters of the hydraulic system were determined, and the parametric design was carried out by using MATLAB/GUI interface.Then, through the ball screw, pushing rod mechanism to achieve the control of the vehicle hydraulic braking system, and designing a brushless dc motor as the power through the reducer deceleration torque actuator. The innovation of this design lies in that the output shaft of the reducer is directly connected by the key and the ball screw, eliminating the coupling.Finally, according to the size requirements of the overall system, the structural size and installation size of the main structural components are optimized to ensure that the minimum space proportion can meet the maximum performance requirements.
This paper only carries out the preliminary design of its mechanical structure. In the future, it can also conduct in-depth research from the structural integration and modular design to design the braking system in line with more models. At the same time, GUI interface editing can be more diversified and systematic, adding more functions of brake system parameter calculation and check.
Key Words:The micro;Unmanned;Logistics car;Wire-controlled hydraulic braking;Parametric design
目录
第1章 绪论 1
1.1 无人驾驶汽车制动系统的研究背景及意义 1
1.2 制动系统国内外研究现状 2
1.2.1 国外制动系统研究现状 2
1.2.2 国内制动系统研究现状 3
1.3 研究的基本内容 3
第2章 制动系统方案设计和分析计算 5
2.1 制动系统方案设计 5
2.2 制动系统参数分析计算 5
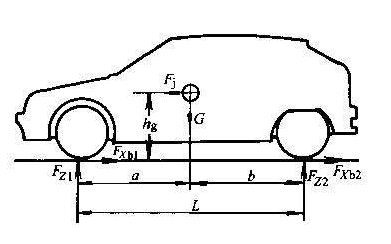
2.2.1 车轮法向力和制动力 6
2.2.2轮缸、主缸直径及制动衬块参数 7
2.2.3 主缸推力和主缸推杆行程 8
2.2.4 滚珠丝杆副选取和校核 9
2.2.5 电机功率 10
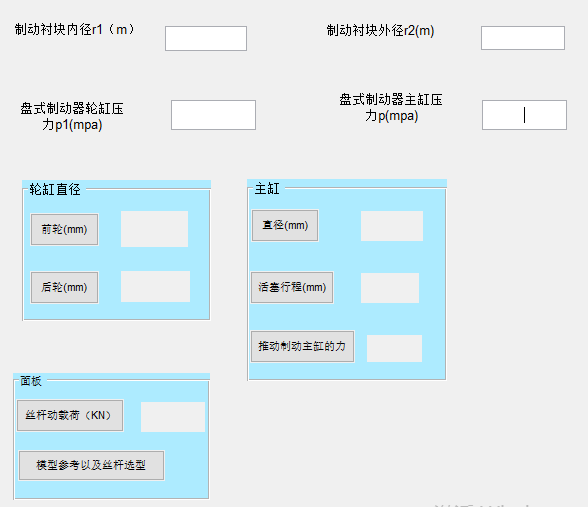
2.3 参数化设计 10
第3章 总体设计方案 12
3.1 机构的安装方式 12
3.2 机构的工作原理 14
第4章 制动系统主要机构设计方案 16
4.1执行机构设计 16
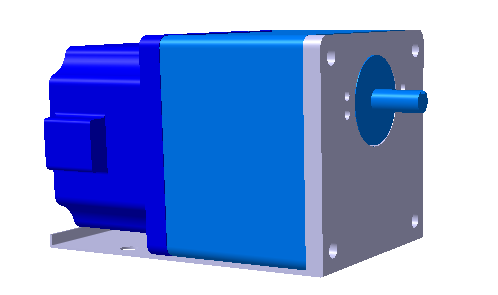
4.1.1 电机及减速器选型 16
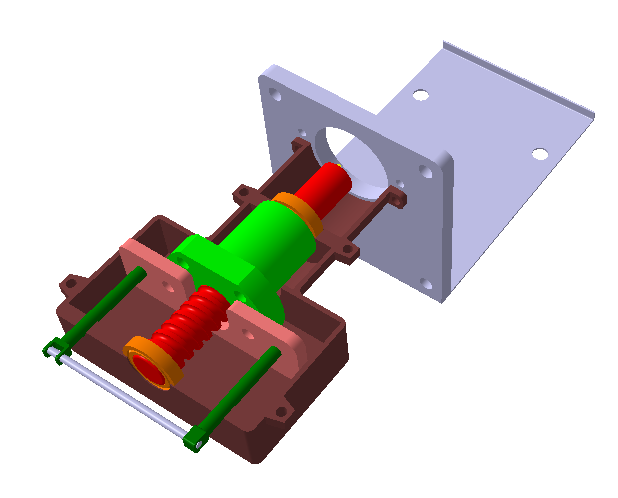
4.1.2 传动机构选型设计 18
4.2 推杆结构设计 19
4.3 制动器选型设计 20
第5章 全文总结与研究展望 22
5.1全文总结 22
5.2研究展望 22
参考文献 23
致 谢 25
附录 26
第1章 绪 论
1.1 无人驾驶汽车制动系统的研究背景及意义
为了节省物流领域的配送成本、提高配送效率和货物运送的安全性,微型无人驾驶物流车在此思想中孕育而成。
以前人们总认为无人驾驶技术最大受益者是人类驾驶者,但是近年来在市场需求逐渐扩大、人力成本不断上升的同时,无人驾驶技术在物流货运领域发挥的作用将会更大。2016年,中国从事快递相关行业的人员总数约为203.3万人,其中,负责仓储分拣的人员数量在16.9万人(一部分工作由AGV代替完成),卡车司机(干线)数量为5.1万人,数量最多的是在货运一线和二线工作的人员,约118.3万人。同其他分线相比,在物流运输方面的无人化改造带来的效益更突出,即这118.3万的一线、二线快递员。以人均每年成本10万元计算,(参考京东2016年底物流人员10.05万,人员成本为108.45亿,每年人均约10万元成本),118万一线快递员就是1180亿的市场。
在过去的两年中,快递数量仍然在快速增长,无人驾驶物流货运发挥的作用将不断变大。因此,同高速自动驾驶相比,特定工作条件下的低速无人驾驶也许将迎来真正意义上的商用化破局,为物流领域节省成本,提高物流配送效率,同时用户也能有安全、快捷的货物配送体验。公路长途货运和危险品运输是值得推广无人驾驶。在人口和车辆数量日益增长的现时代,由于驾驶员操作不当或者注意力不集中导致的交通事故比重逐渐增大。在特定的网购节日期间,物流配送的需求激增,此时相应的长途货物配送数量随之迅速增大,然而经常发生许多长途货运司机由于疲劳驾驶出车祸,或者危险品运输路途中发生了事故。如果采用无人驾驶进行货运,那么车辆在运输过程都会得到全面监控,特别是危险品运输,不论是车辆工作情况、行进路线、货物安全、交通路况都能得到实时监控。即便发生交通事故,也能减少财务损失、人员伤亡[1]。
制动系统在自动驾驶中起着重要作用,是无人驾驶物流车安全工作的保证。因为微型物流车结构紧凑、空间布局优化要求较高,制动系统的整体结构尺寸应较小,以最小的空间占比满足最大的功能需求[2]。本次设计将针对微型无人驾驶电动物流车制动系统进行设计,满足低速行驶条件下物流车的制动要求,实现精确的主动制动,达到物流车正常行驶的要求。
1.2 制动系统国内外研究现状
无人驾驶在国外兴起较早,基础设施、应用技术及测试评估方法等相对成熟。在这样的大背景下, 国外企业对无人驾驶技术研发的积极性很高,近年来,国内的相关研发机构和企业也聚焦于此,并在研究与应用上都有丰富的研究成果。智能制动系统是实现无人驾驶的关键,如今搭建电控制动系统主要分为三个方向:1.在原车已有的自动系统上加装动力装置。2.加装一个和原车制动系统并联或者串联的动力装置进行控制。3.制作出一套完整的与原车不同的制动系统,单独进行控制。难度较小的为第一、二种,也为主流的研究方向。本节大致分析国内外对制动系统的研究成果。
1.2.1 国外制动系统研究现状
德国的博世公司(Bosch)推出了多种新型液压制动系统HAS-Hev、ESP-hev 、i-Booster等。其中HAS-Hev制动系统取消了传统的真空助力器,依靠制动执行单元、液压驱动控制模块以及ESP液压调节单元协同作用,实现主动增压、助力制动等功能。它的制动执行单元包括改进的制动主缸、被动式踏板感觉模拟器、各类传感器等[3]。结构如下图1.1

图1.1
i-Booster II 代的传动装置中采用了两级齿轮减速与空心丝杠的结构,为了实现智能辅助制动的需要,在此基础上设计了一种新的制动方案。这套系统采用了液压泵和i-Booster两个动力源,在容错率表现比较出色,能够保证较好的车辆制动效能。和ESP相结合,iBooster 能够为自动驾驶提供冗余制动备份。iBooster 和ESP均可通过机械推动力,帮助车辆在任何减速情况下停止行驶。iBooster 可在约120 毫秒内自动建立全制动压力。这不仅有助于缩短制动距离,还能在碰撞无法避免时降低撞击速度和对当事人的伤害风险[4]。结构如下图1.2

图1.2
大陆公司(Continental)正在开发新一代制动系统MKC1,它结构紧凑,系统建压较快。大陆集团研发的MKC1制动系统可以在极短的时间内(约150毫秒内)建立起制动压力,比应用于大多车辆上得传统制动系统要快一倍[5][6]。结构如下图1.3

图1.3
在气压制动的商用车辆中,Karthikeyan等在实验台架上完成了结合电控气压阀和制动气室的试验。建立了控制电压输入和制动气室压力变化的数学模型,该数学模型能较好地预测瞬变,最大相对误差为10.4[7][8]。
1.2.2 国内制动系统研究现状
东南大学殷国栋等人发明了“无人驾驶车辆通用制动系统及控制方法”专利,他包括控制单元和执行单元,可以直接用于无人驾驶的设计制造而无需再改装传统制动系统。其发明的改装较为简单,不需要单独的驻车制动系统,适用于液压制动[9]。
长安大学肖炎曦利用尼龙绳、电机、绕绳器等完成对制动踏板的控制,再用MATLAB/Simulink建模,对电机进行仿真制动工况研究。该机构通过绕绳器转动使拉绳收缩、伸长来控制制动踏板上下运动,、模拟驾驶员踏板的过程,另外在制动主缸加装压力传感器,将制动力信息反馈到控制单元,结构简单[10]。结构如下图1.4
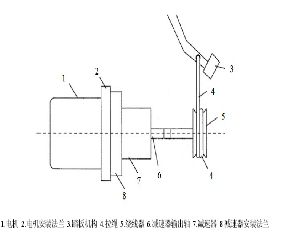
图1.4
胡建峰、鲁振等进行了无人驾驶车辆的电液控制研究,着重设计并分析了电液制动回路,验证了它的制动性能的可靠性,其中使用的行车电液反比例减压阀具有很好的比例特性,能够很好地模仿人类制动的特性,安全制动[11]。结构如下图1.5

图1.5
2014年中国人民解放军军事交通学院开发了一套能实现智能驾驶的自动液压制动系统。他们在制动主缸和ESP-HCU系统油管之间增加接受制动控制计算机控制的电磁阀组,该电磁阀组与油泵电机以及液压泵连接。同济大学的卓桂荣等人采用电动推杆和踏板的机构,原理和该方案类似[12]。结构如下图1.6
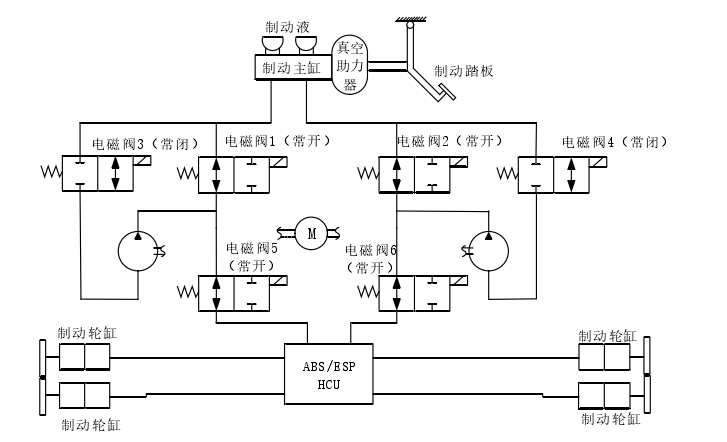
图1.6
北京理工大学张瑞林在东风猛士EQ2050这一款车上设计了一个双回路液压制动系统(人工制动、电控制动),围绕助力器输入杆的力与位移对制动系统产生的压强之间的关系函数,确定各个控制参数。两个回路通过一个两位三通的电磁阀切换(切换时间约为200ms),反应速度灵敏(响应时间150ms以内),制动效果较好,满足人机共驾自动驾驶的要求[13]。结构如下图1.7
图1.7
通过比较国内外的制动系统研究现状,发现液压制动系统的应用较多,技术相对成熟,因此本次设计决定沿用液压系统,在其结构设计上加以改进。
1.3 研究的基本内容
本次毕业设计是完成微型无人驾驶电动物流车制动系统设计,使得电动物流车在无人驾驶的情况下,依靠环境感知系统和各类传感器完成对制动系统的底层控制,实现整车制动。本文研究的基本内容主要分以下几个方面:
(1)通过论述物流领域的成本和安全性提出了无人驾驶物流车发展的必要性,简要介绍了制动系统的研究发展现状,比较了国内外在该方向上做出的成绩。在大部分无人驾驶车辆的制动系统中,都选择采用技术较为成熟的液压机构进行优化设计,其中对于制动踏板、制动主缸等执行机构的设计是主流方向。近年来,国内的制动系统安全性和可靠性都迅速提升,其技术也逐渐成熟。总结以上分析,执行机构直接推动制动主缸的方案结构紧凑、效率较高,理论上其响应速度和传动精度均较高。
(2)设计了制动系统的方案,进行了理论分析。根据法规和目标车型的要求,重点分析了电机和传动机构的方案。包括比较各类减速器的性能,结合实际需要选用合适规格的斜齿圆柱齿轮减速器,对选用的滚珠丝杠副进行载荷校核,比较了盘式制动器和鼓式制动器的优缺点,采用了盘式制动器,并确定了关键的参数,设计其机械结构。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: