无人驾驶电动巴士车转向系统设计毕业论文
2020-02-17 10:54:35
摘 要
传统汽车的安全性问题,效率问题和环境与能源问题日益突出,无人车的开发理念以其效率高,安全性高,与电力结合紧密易于改善环境等优势,为解决以上问题提供了新的思路。转向系统的设计影响着整车的性能及布置。是它的重要组成部分,所以对无人驾驶汽车转向系统的研究具有重大意义。
本文设计了一种用于无人驾驶的转向系统执行机构平台,目标对象为电动巴士车。当在此设计平台上对车身与车架加以设计,使容量可以乘坐四人,则将实现无人驾驶电动巴士车的转向功能。具体研究内容如下:
(1)首先了解无人驾驶领域和转向系统的国内外研究情况,并对其进行分析和总结,列举了一些主要方案与技术思路,得到可以进行研究的关键点。
(2)然后对转向系统所采用的方案进行了具体设计,包括电机类型,电机安装位置以及转向器类型和输入方式等,并提出了减速器和齿轮轴一体化的创新型方案。
(3)其次进行转向系统的参数计算,例如根据整车参数确定转向原地阻力矩和传动比等,再进行齿轮齿条的设计与校核,减速器的设计及间隙调整机构的设计等,并完成三维模型的建立。
(4)最后对转向系统产品进行基于Catia中DMU的运动机构仿真,检测了运动的可行性并对仿真数据进行分析。为了提升能力并实现计算的灵活性,还对部分计算过程设计了基于Matlab中GUI模块的参数化计算界面,通过输入参数验证了该界面的合理性。
由于时间等条件的限制,还存在一些内容需要完善:
(1)对部分零部件没有进行有限元分析等工作,故对实际工作过程的承载情况无法得到准确的保证。
(2)本次实际没有涉及到控制方面的内容,所以严格来说并不完整,在以后的研究工作中若有机会应对其进行完善。
关键词:转向系统;无人驾驶;电动巴士车;建模;运动仿真
Abstract
The safety, efficiency and environmental and energy problems of traditional automobiles have become increasingly prominent. The development concept of unmanned vehicle provides a new way to solve the above problems with its advantages of high efficiency, high safety, and easy to improve the environment by combining closely with electric power. The design of steering system affects the performance and layout of the vehicle. It is an important part of the steering system, so the research on the steering system of driverless vehicles is of great significance. This paper designs an actuator platform for driverless steering system. The target is electric bus. When the body and frame are designed on this design platform to make it have the capacity to ride four people, the steering function of the driverless electric bus will be realized. Specific research contents are as follows:
(1) Firstly, the domestic and foreign research situation in the field of unmanned driving and steering system is understood, and the analysis and summary are made. Some main schemes and technical ideas are listed, and the key points that can be studied are obtained.
(2) Secondly, the scheme of steering system is designed concretely, including the type of motor, the installation position of motor, the type and input mode of steering gear, and the innovative scheme of the integration of reducer and gear shaft.
(3) Thirdly, the parameters of steering system are calculated, such as determining the steering resistance moment and transmission ratio according to the vehicle parameters, designing and checking the gear rack, designing the reducer and the clearance adjustment mechanism, and completing the three-dimensional model building.
(4) Finally, the motion mechanism simulation of steering system product based on DMU in Atia is carried out, and the feasibility of motion is tested and the simulation data are analyzed. In order to improve the ability and realize the flexibility of calculation, a parametric calculation interface based on GUI module in MATLAB is designed for some calculation process. The rationality of the interface is verified by input parameters.
Due to the limitation of time and other conditions, there are still some contents to be improved:
(1) Some parts have not been analyzed by finite element method, so the load-bearing situation of the actual working process can not be accurately guaranteed.
(2) There is no actual content of control, so strictly speaking, it is incomplete. If there is an opportunity, we should improve it in the future research.
Key words:Steering system; Unmanned electric bus; Modeling; Motion simulation
目 录
第1章 绪 论 1
1.1课题研究的目的和意义 1
1.2国内外研究现状 1
1.2.1无人驾驶技术研究现状 1
1.2.2转向系统研究现状 2
1.3课题的主要研究内容 6
第2章 无人驾驶电动巴士车转向系统方案设计 7
2.1电机的选型与安装 7
2.1.1电机类型的选择 7
2.1.2电机安装位置的选择 7
2.2减速器的选型 8
2.3转向器的选型 9
2.3.1转向器类型 9
2.3.2转向器输入方式 9
2.4横拉杆的连接方式 10
2.5总体方案确定 11
第3章 转向系统的具体设计与计算 12
3.1整车参数的确定 12
3.2转向轮转角的计算 12
3.3转向器原地转向阻力矩的计算 13
3.4转向器的传动比计算 13
3.5齿轮齿条的设计 13
3.5.1齿轮和齿条的传动特点 13
3.5.2齿轮与齿条的类型 13
3.5.3齿轮参数的选择 14
3.5.4齿条参数的选择 14
3.5.5齿轮的校核计算 15
3.6减速器齿轮轴一体化设计 17
3.7间隙调整弹簧的设计计算 18
3.7.1弹簧材料选择和弹簧丝的计算 18
3.7.2弹簧圈数和其他参数的确定 19
3.8其他零部件的展示 20
第4章 转向系统的运动学仿真及GUI计算界面设计 23
4.1转向系统的运动学仿真 23
4.1.1运动学仿真的过程 23
4.1.2运动学仿真的结果 24
4.2基于GUI的计算界面设计 26
第5章 总结与展望 28
参考文献 29
附录 参数化计算主程序 30
致 谢 31
第1章 绪 论
1.1课题研究的目的和意义
电子信息技术与互联网技术飞速发展,促进了汽车行业智能化的兴起。汽车的智能化,无人化以及网联化[1],这些方向为汽车的未来模式与转型指明了道路。
目前传统汽车存在着一些有待解决的问题,大致如下:
(1)安全性问题。由2015年世卫组织调查报告显示,全球范围内因交通事故受伤的人数达到了5000万人,其中死亡人数占比为2.5%,若任由其发展,那么因交通事故受伤人数会于2035年增长65%,其导致死亡人数将超过众多疾病,占据死亡人数死因排行榜首位。
(2)效率问题。汽车产销量和保有量大幅度提升,在2014年中国汽车产量便突破了2000万大关[2]。由此带来的城市中的交通拥挤现象也日趋严重,以方便出行为初衷的传统汽车却带来了诸多的不便。
(3)环境与能源问题。近年来自然环境被严重破坏,大气污染越来越严重。尾气排放导致空气质量下降,越发地开始威胁人们的健康。加上能源短缺问题突出,传统汽车发展受到了很大的制约。
为解决这些问题,无人车的开发理念以其效率高,安全性高,与电力结合紧密易于改善环境等优势,被众多业内人士认作是汽车发展的明智方案。因此,很多高校与企业也纷纷致力于无人车的研究工作。
目前的高科技与汽车已有技术结合,已经可以制造出很多种不同类型的无人车。无人驾驶电动巴士上车载计算机的主控制器会根据图像识别和环境感知等技术[3],得到路况与环境信息,向执行机构发送相应指令,而执行机构得到指令后,应能在短时间内完成指定转向动作。由此可见,转向系统是无人驾驶电动巴士车的不可或缺的一部分,整个转向系统的设计将影响着整车的性能及布置。
本次毕业设计对无人驾驶电动巴士转向系统进行设计,符合汽车行业与当代互联网科技结合的发展趋势,可以说具有重要的现实意义。此外,既能够锻炼我们运用现代设计方法和设计软件来进行汽车零部件设计的能力,还可以培养关于未来汽车发展进步的创新思维,为以后从事科研工作做足准备。
1.2国内外研究现状
1.2.1无人驾驶技术研究现状
智能化与电动化是当前汽车行业的发展趋势[4]。国内外众多的科研院所以及高校,对推动车辆智能化和电动化投入了大量的资源,并且涌现了诸多研究成果。
(1)国外现状
无人驾驶技术应追溯于20世纪50年代的美国,但当时只完成简单的车辆自主转向动作。1995年,卡内基梅隆大学设计的Navlab2V无人车以50km/h的平均速度横跨了美国的东西部,全程近5000km。它可以完成自动避障和超车等动作,可是还需要驾驶员对速度控制。
2007年,卡内基梅隆大学研制的Boss运用纯点跟踪算法进行轨迹跟踪控制,可以实现自动换道,停车等驾驶行为,由此标志无人车初步具备识别简单城市道路能力。
2017年,特斯拉针对其电动汽车,上线了名为Autopilot的无人驾驶系统,用户可以采取OTA的方式升级,只是自动驾驶中离不开驾驶员的接管。现在其推出了Autopilot2.0,可以识别交通信号灯驾驶。
谷歌公司对于车辆周围环境的3维重建有深入研究,同时致力于开发高精度地图和自主导航功能。截止至2015年,谷歌拥有55辆无人驾驶试验车,总行驶里程达到了209万公里,已经积累大量数据[5]。
(2)国内现状
国内对无人车的研究起步较晚。1992年,由国防科技大学对面包车进行改装,并且在车上加装传感器,我国第一辆无人驾驶平台诞生。
2011年,一汽和国防科技大学无人车团队合作研制了HQ3,这辆无人驾驶汽车行驶中遭遇复杂路况,平均车速还是达到了90km/h,行驶里程将近300km。这次无人驾驶的实验取得成功,标志我国掌握了在开放路段中实现车辆较高级别自主驾驶能力。
2017年,百度推出了Apollo1.0无人驾驶开源的平台,并于12月份宣布其已经实现了高速及复杂路况下的全自动行驶。2018年4月,百度随即又推出了Apollo2.5平台,这个平台主要利用了计算机视觉来实现对环境的感知,使传感器成本大幅度降低,而且支持的场景也更加多元化。
1.2.2转向系统研究现状
汽车技术的不断发展与进步,也正在促使着转向系统的不断革新,它的发展历程及现状如下表1所示。
在无人驾驶的大趋势之下,人们也不可避免地开始关注相应转向系统的研发。人们的乘坐舒适性以及无人驾驶时的跟踪精度,都和转向系统的性能息息相关。无人驾驶的转向系统,它总体上包括转向控制机构以及转向执行机构,而转向执行机构的设计思路则是以
表1.1 转向系统的发展
转向系统类型 | 特点 | 原理图 |
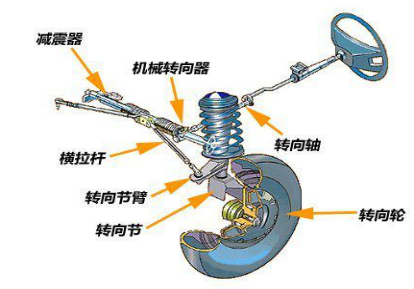
机械转向 | 其构造为用纯人力驱动各种机械结构的组合,经过人力的放大、变向等步骤来驱使轮胎转动,其特点是:结构简易,相对可靠,但使用时费力,稳定性以及精确性无法保障。 |
|
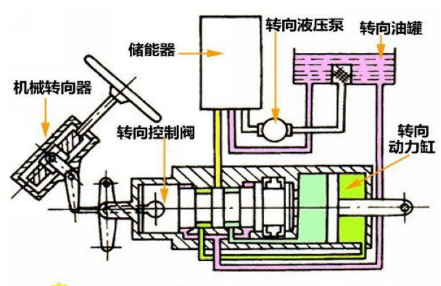
机械液压助力转向 | 其构造总体上包含液压泵、油管以及储油罐等一系列的装置。它主要是将发动机的部分动力转变为液压泵的压力,来对转向系统施加一种辅助力,从而使轮胎实现转动。 |
|
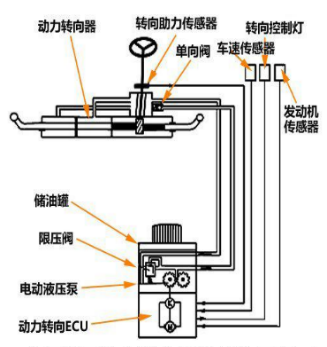
电子液压助力转向 | 其系统的动力来源不再依靠发动机,而是依靠电动机。以液压助力转向系统为原型,增加了电控系统。转向辅助力的大小既涉及到转向角度,还涉及到车速。机械构造上还增加了液流分配阀等。新增的电控系统包含转向ECU、电磁阀等。 |
|
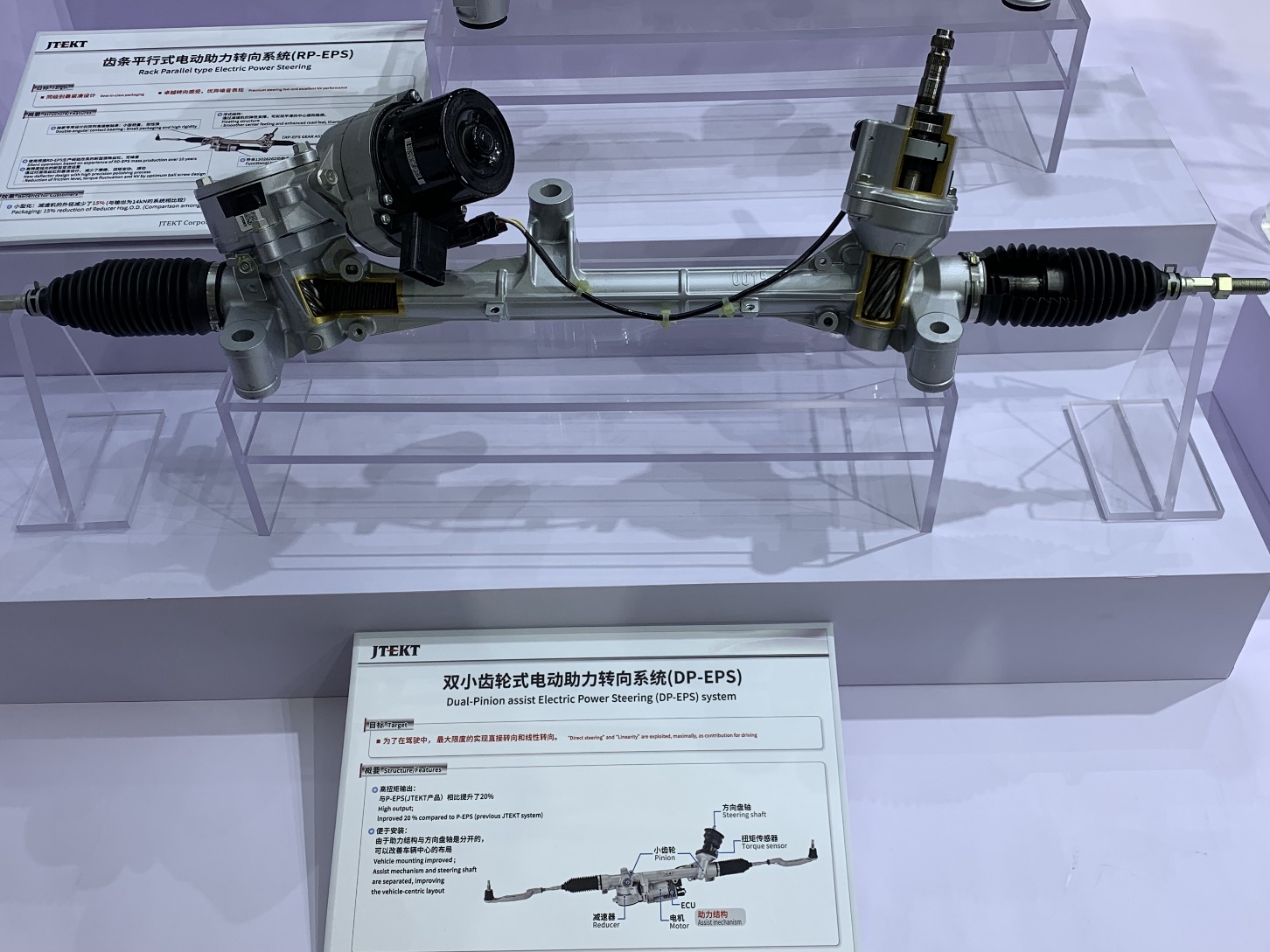
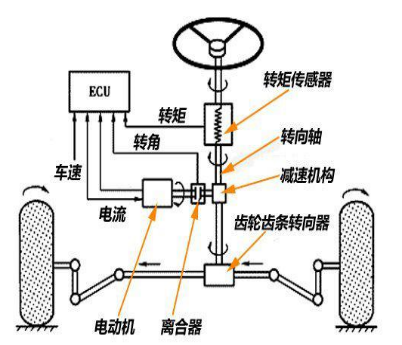
电动助力转向 | 其主要元件包含车速传感器、转矩传感器和电动机等。车速和转角的信息由传感器获取,ECU根据接收的信号控制电动机的电流大小,将电动机的转矩一步步输入至转向系统中,直到传给车轮,实时调整转向助力。 |
|
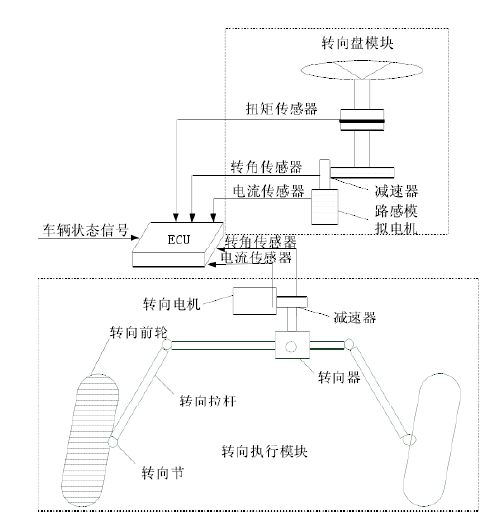
线控转向 | 该转向系统取消了转向盘和转向轮之间的机械连接。第一部分包含转向盘、转矩传感器、转向角传感器等;第二部分为电子控制系统,包含车速传感器,还能增加横摆角速度传感器和电子控制单元以提高车辆的操纵稳定性;第三部分是转向执行机构,包含转向电动机、角位移传感器、转向器等装置。 |
|
线控转向为原型。它分为两种。一种是纯电动控制:这是一种将电机的转矩传递到车轮的转向机构,利用控制系统来调节电机的转动,从而完成车辆的自动转向;另一种是电液控制,这是对车辆原有的电液系统进行改装,通常是在车辆液压助力转向系统中,再并联一套电控液压系统,还是利用控制器来调节电控液压系统,完成车辆自动转向。电液控制传递扭矩较大,但是结构较为复杂;电机控制结构较为简单,但是车辆负荷大时需要大型的电机。当前电动汽车飞速发展,上面的电源可达到数百伏的电压[6]- [8],比如特斯拉Model S,该车电池组电压高达400V,为在大型车上安装大功率电机提供可能。
(1)国外现状
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: