012自升式平台方案设计毕业论文
2020-04-03 11:53:23
摘 要
自升式平台作为海上移动式平台中的一种,其为海洋油气开发的重要海工装备,是运用最广的平台之一。本文通过对中国船级社的《海上移动平台入级规范(2012)》和ABS的《海上移动平台建造和入级规范(2012)》的查阅,结合《船舶设计原理》、《船舶静力学》等参考书籍,对“012”自升式平台进行了初步方案设计与校核。
本文共有五个章节,介绍了“012”自升式平台的方案设计和平台性能的计算与校核。根据任务书和规范的要求、结合母型平台的资料,通过方案论证,确定了设计平台主要尺度与总布置的方案设计。在此基础上,对平台进行重量重心的估算。再利用相关软件(如:AutoCAD、Excel)对平台进行各项性能的计算与校核。如:静水力计算、环境载荷计算、完整稳性、站立稳性和干舷的校核。最终得到的结果满足规范的要求,则该平台方案设计可行。
关键词:自升式平台;方案设计;静水力计算;稳性校核
Abstract
As a kind of offshore mobile platform, jack-up platform is one of the most widely used platforms for Marine oil and gas exploitation. In this paper, we have carried out preliminary design of the "012" jack-up platform and check its performances by referring to the books of " Classification Standard of The Offshore Mobile Platform (2012)" of CCS and " Construction And Classification of Offshore Mobile Platforms (2012) " of ABS and other reference books, for example " Ocean Platform Design Principles" and "Ship statics ", etc.
There are five chapters in this paper. It introduces the preliminary design of "012" jack-up platform and the calculation and check of platform performance. According to the requirements of the assignment book and the specification, referring to the data of the mother platform, and attaining the reasoning scheme, the main scale and the overall layout design of the design platform are determined. Based on these data, the weight and the center of gravity of platform are estimated. Use relevant software (such as AutoCAD and Excel) to calculate and check the performance of the platform, such as hydraulic calculation, environmental load calculation, complete stability check, standing stability check and freeboard check. The final result meets the requirements of the specification,then the design of the platform is feasible.
Key words: Jack-up platform; preliminary design; hydrostatic calculation; stability check
目 录
第一章 绪论 1
1.1研究背景及意义 1
1.2国内外研究现状 2
1.2.1海洋平台的发展历史 2
1.2.2国外自升式平台研究现状 2
1.2.3国内自升式平台研究现状 3
第二章 自升式平台方案设计 5
2.1平台设计要求 5
2.2主尺度要素的确定 5
2.2.1平台的相关定义 5
2.2.2主尺度的获取与确定 6
2.3平台总体布置 8
2.4平台坐标系 10
2.5平台重量与重心位置估算 10
2.5.1空平台重量估算 10
2.5.2可变载荷估算 11
2.5.3重心位置估算 12
第三章 海洋环境载荷计算 14
3.1载荷参数 14
3.2风载荷 14
3.2.1计算方法 14
3.2.2计算结果 17
3.3波浪载荷 17
3.3.1计算方法 17
3.3.2计算结果 25
3.4海流载荷 27
3.4.1计算方法 27
3.4.2计算结果 28
第四章 平台各项性能计算与校核 29
4.1静水力要素计算 29
4.1.1静水力计算符号说明 29
4.1.2静水力计算与结果 29
4.2最小干舷校核 32
4.2.1 的选取 33
4.2.2 的修正 33
4.2.3 的修正 33
4.2.4 的修正 33
4.2.5 的修正 33
4.2.6 的修正 34
4.3完整稳性校核 35
4.3.1完整稳性一般准则 35
4.3.2初稳性 36
4.3.3动稳性 36
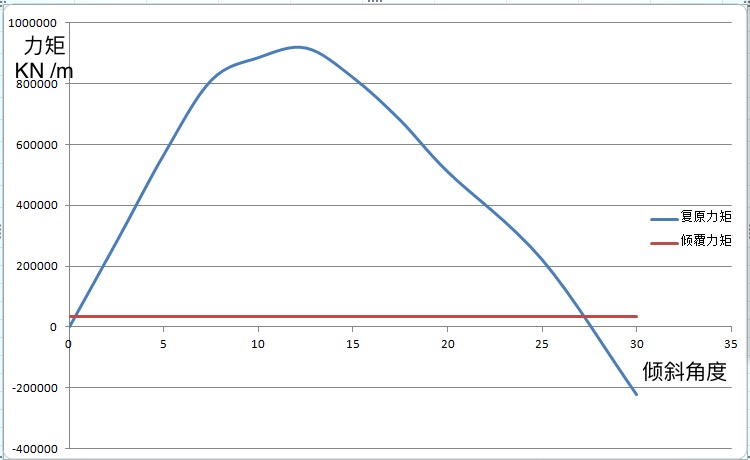
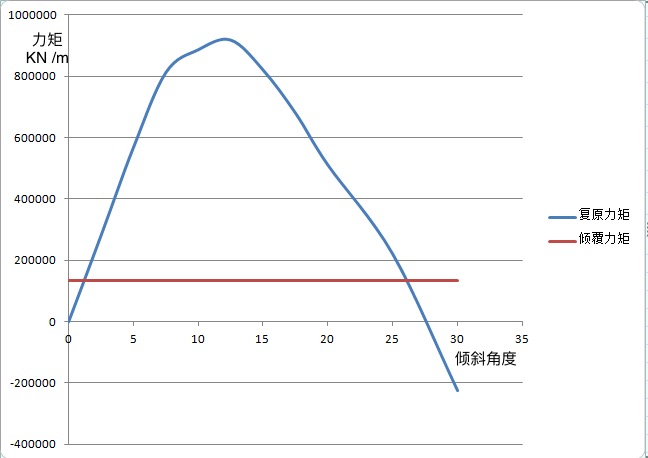
4.4站立稳性校核 38
4.4.1站立稳性的准则 39
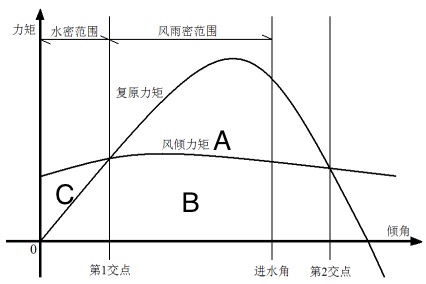
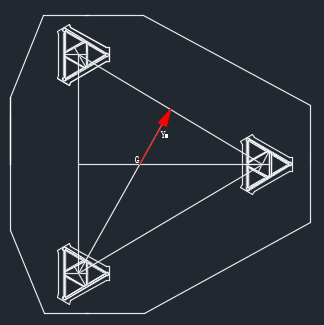
4.4.2抗倾稳性 39
4.4.3抗滑稳性 43
第五章 结论与展望 45
5.1本文总结 45
5.2展望 45
参考文献 47
致 谢 49
第一章 绪论
1.1研究背景及意义
当今世界,随着科技的迅猛发展和飞速进步,人类对能源的渴望与需求日益增大,油气资源首当其冲。21世纪是属于海洋的世纪,陆地上的油气资源由于长时间的开采与人类对油气资源开发技术的深化,进而,人类将对世界上的油气勘探的目光逐渐从陆地投向了蕴藏着丰富、大量的化学元素、海洋动力资源和油气资源等能源的海洋之中。
目前,全球范围内的海洋油气开采量与具备海洋勘探开发作业能力的国家的数量均发生了巨大的变化。截止2010年,能够从事海洋勘探开发的国家和地区在全球范围内已有100多个, 其海洋油气所开发的油气产量已占全球总油气产量的35%以上[1]。
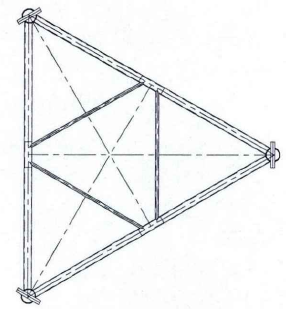
自升式平台又称自升式石油钻井平台,是海上移动式平台中的一种。其为钢质、非自航平台,通常由一个驳船式船体、机械设备和若干能升降并起支撑作用的桩腿等组成(桩腿至少三只)[2]。作业时,平台船体先是被拖航至作业点,然后将桩腿插入海底,平台船体被其抬升至海面以上使之得以被支撑,避开海浪等对平台船体的冲击,从而顺利完成钻井作业。完成作业后,平台主体降至海面,依靠浮力将桩腿拔起收回,便可拖航至下一个井位地点[3]。根据作业水深的不同其桩腿结构分有方形、圆形和三角桁架结构,其结构可以是封闭壳体式或者是构架式。桩腿下端一般设有桩靴或沉垫,其升降机构分别有液压式和电动齿轮齿条式。在众多的海洋平台中,自升式平台拥有作业稳性良好、浮运拖航方便、便于建造,又不会因风、流、浪等因素的影响而发生纵向摇摆、横向漂移和垂向升沉等运动等各种优点。相对于半潜式平台和钻井船等移动平台,自升式平台的居住舒适度更高。因此,自升式平台作为海洋油气开发的重要海工装备一直被广泛的运用着,其是运用最广的平台之一。
相较于一些欧美大国,我国海洋油气勘探开发受限于自身的工业基础,所以从事该作业的时间较短。致使我国在海洋钻井、平台定位、自动检测等等技术方面都与发达国家存在很大的差距[1]。国内海工技术力量的薄弱,严重抑制了我国石油产业的发展,导致对外国公司长期依赖。而我国海岸线漫长,拥有辽阔的海域,目前经济的发展已高度依赖广阔的海洋。随着我国综合国力的日益增强、国际地位的提升和复杂的国际形势的不断变化,大力发展海洋事业、实现中国海洋强国梦想的重要性日益突显。近年来,海洋工程科技已经被列入国家中长期科学和技术发展规划之中。加之中共十八大报告提出的关于“海洋强国”的建设目标,自升式平台的研究与建设迫在眉睫,是我国要想复兴中华成为世界强国的必由之路。
1.2国内外研究现状
1.2.1海洋平台的发展历史
1891年,人类在俄亥俄州圣玛丽湖建造了一个湖泊平台,海洋平台的雏形从此诞生。真正意义上最早出现的海洋平台是导管架平台,它是最原始、最直接将钻井设备与海底相连接的装备。由于它不能移动的重大缺点,经研究人员的不懈努力,坐底式平台成功面世。它是早期在浅水作业的一种移动式平台。虽然能移动,但由于其工作水深不能调节,已日渐趋于淘汰[4]。至此,自升式平台应运而生。1954年,世界上第一座自升式平台“德隆1号”诞生。第一座三桩腿自升式平台“Zapata Scorpion”号于1956年在墨西哥湾交付美国Standard Oil公司使用[5]。随着人类对海洋能源日益增长的渴望,海上钻采作业逐渐向深水区发展。届时,壳牌公司Bruce Collip提出了能到更深的地方作业的半潜式平台的理念[4]。海洋平台经过半个世纪的快速发展,其中自升式石油钻井平台凭借其优越的性能特点,快速占领了钻井平台总市场份额的60%,剩余的40%的市场份额主要由半潜式、底座式以及钻井船占领[6]。
1.2.2国外自升式平台研究现状
目前,国外主流的自升式平台设计公司主要有:美国的LeTourneau[7]公司、Friedeamp;Goldman(Famp;G) [8]公司、法国的NOV-BLM公司[9]、新加坡的吉宝公司[10]以及荷兰的GUSTO MSC[11]公司等。美国的LeTourneau公司是自升式平台设计建造的先驱。其建造的平台主要型号有ENSCO81、ENSCO85、ENSCO92等,主要采用的是3根桁架式桩腿,齿轮齿条式升降机构形式。116-C型自升式钻井平台为该公司的典型产品。Famp;G公司主要的钻井平台有L780系列的OCEAN HERITAGE、OCEAN SOVERRIGN等,目前主推JU2000型。该公司的齿条锁定系统使得自升式平台能够进入更深与更恶劣海况的海域工作[3]。而法国BLM公司早已被美国NOV公司收购。NOV为专门制造石油井下工具服务设备的世界领军企业。法国BLM公司则是与几家大公司一起垄断了自升式平台电动齿轮齿条升降技术。吉宝岸外与海事旗下的子公司KEPPEL FELS是世界自升式平台设计建造的领先者。其B-Class专利设计,自推出以来便受到市场广泛认同。该公司还能根据客户的需要设计建造各种半潜式平台。荷兰MSC公司的典型产品是Maersk Gal-lant自升式平台。X-Y悬臂梁是其公司的专利技术。
其中,美国的LeTourneau公司、Famp;G公司以及荷兰的GUSTO MSC公司等垄断了自升式平台升降系统的市场,且产品均已系列化[3]。
1.2.3国内自升式平台研究现状
1972年,我国第一艘自升式钻井平台——“渤海一号”于大连造船厂完工交船。该平台开创了我国自升式平台的先例,且经受住了唐山大地震的考验[12]。在这之后的几十年间,经过我国科研人员的不懈努力,加之改革开放使外国先进技术和设备得以进入中国,我国建造了一系列自升式平台。如:JU200E型、CJ46型、GM4000型、DSJ300型等。自升式平台的最深作业水深由30米变为近200米。其中中国海洋石油总公司的“海洋石油941”和“海洋石油942”是目前国内作业水深最深、自动化程度最高,具有国际先进水平的自升式钻井平台[13]。
目前,我国已具备自升式平台的设计与建造的能力。虽然由于我国海洋装备技术基础薄弱,许多关键技术与设备仍掌握在外国厂商手里,致使我国三大石油公司拥有的自升式钻井平台的升降系统多数为进口。但也有极少的国内厂商在此方面取得了一定进展。如:烟台莱佛士、上海振华重工等[3]。并且我国深水油气开发技术已迈出可喜的一步,在一些比较先进的油气工程装备方面已实现国产化。
当前自升式钻井平台的主流是悬臂梁形式。近年来,国内关于悬臂梁形式自升式海洋平台的研究有了很大的进展,例如:大连理工大学研究设计了“石油钻井平台钻塔移动装置”、中国船舶工业集团公司第708研究所设计了“自升式钻井平台悬臂梁纵横移动装置”、四川宏华集团研究设计了“一种自升式钻井平台悬臂梁滑移装置”等[14]。当然,国内在关于自升式海洋平台整体与局部研究方面也有很大的进展,例如:天津大学的王力[15],运用ANSYS软件,对某百米工作水深的自升式平台建立整体和局部的有限元模型,最终来模拟局部模型的受力情况。雒强[16]等人利用有限元法对自升式平台纵舱壁和横舱壁上开孔前后的应力计算。
国际上,我国学者与外国学者的交流合作使得自升式平台的发展更上一层楼。Zhao和Sun[17]在2014年发表了关于新型桩靴与浮力模块在自升式平台上的应用的文章。Won-Hee[18]等人在2016年发表了关于湿拖曳过程中自生式平台响应的随机极限运动分析的文章。2017年,Hu 和Cassidy[19]发表了关于预测自升式平台桩靴安装在覆硬黏土沙子上的文章。
第二章 自升式平台方案设计
2.1平台设计要求
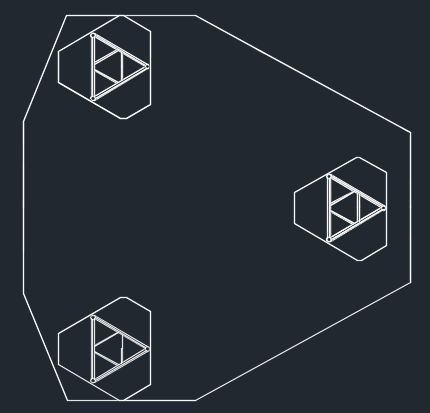
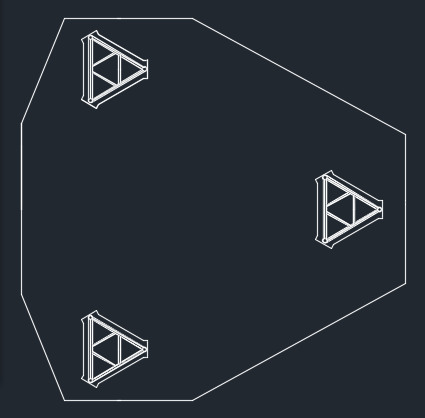
设计要求:此次设计的平台为三桩腿、非自航的平台长度为80m的自升式平台。其可供128人居住,用于在水深为90m、设计的极限海况为:潮流1.544m/s,浪高18m,风速51.5m/s、工作状态的海况为潮流1.544m/s,浪高5m,风速18m/s的范围内的南海区域进行作业。
2.2主尺度要素的确定
2.2.1平台的相关定义
2.2.1.1主尺度的相关定义
1. 平台的长度L(m)
L:在0.85D(D为型深)处,平台中纵剖面上,首尾壳板内缘之间水平的距离。
2. 平台的宽度B(m)
B:位于纵剖面垂直测量得到的,两舷壳板内侧之间最大的水平距离。
3. 型深D(m)
D:平台长度的中点处,舷侧基线到干舷甲板下缘间的垂直距离。
4. 干舷甲板
干舷甲板:指的是平台上露天全通甲板最高的一层。其露天的开口和外部开口均有永久的封闭装置。
5. 基线
基线:过平台底板上缘一条水平的线。
6. 空载重量
空载重量:整个自升式平台连同安装的设备还有工具,包括其备件及机械、管路中正常工作水平所需的各种液体的重量和固定压载,但不包括储存在液舱内的水、油、消耗品、储存物品、可变载荷、船员和行李重量。
2.2.1.2自升式平台作业模式
作业模式指的是当平台在作业或者迁航时所处的操作状态或者作业工况,由ABS《海上移动平台建造和入级规范》可将平台的作业模式分为以下3种形式:
1. 正常作业工况:当平台在作业地点进行作业或者其他操作的时候,其所承受同作业相适的、在设计限度内的作业载荷与组合环境载荷的状态。
2. 风暴自存工况:该工况是平台可能遭到的最为恶劣的环境载荷的一种设计工作状况。在此状态下,因其环境载荷较为剧烈,平台需停止作业。
3. 迁移工况:当平台从一个作业地点迁移到另外一个作业地点时的状态。在进行该状态下的载荷计算时,因现行稳性横准使用的是气象横准,所以只计算风载荷对平台的倾覆作用,其他的环境因数将在稳性横准数中考虑。
2.2.2主尺度的获取与确定
该平台主尺度的设计采用的是母型平台改造法来确定。此次设计,取“南海4号”为母型平台,详见下表2.1和表2.2。
表2.1 母型平台的尺度表
项目 | “南海”4号参数 | |
主船体 | 平台长(L) | 64.9m |
平台宽(B) | 64.6m | |
型深(D) | 7.5m | |
设计吃水(d) | 4.57m | |
重心高度(G) | 12m | |
空船重量(W) | 11660T | |
方形系数(Cb) | 0.78 | |
井口槽尺寸 | 15.86m×15.86m |
设计平台尺度计算的方法说明:
1. 因设计平台的主体比母型船的还要长,为确保设计平台的稳定性,此处的方形系数取值稍比母型平台的大。
表2.2 母型平台的桩腿参数
项目 | 大小 |
插桩深度(h1) | 7.9m |
设计作业水深(h2) | 91.4m |
设计波高(h3) | 15.2m |
空气间隙(h4) | 11.6m |
升降室高度(h6) | 9m |
桩腿总长(h) | 127m |
波浪周期 | 10s |
弦杆中心距 | 10.5m |
2. 平台主尺度根据母型船,按比例近似计算(桩腿总长除外)。
3. 桩腿总长为插桩深度、设计作业水深、设计波高、空气间隙、平台型深、升降室的高度、余量之和。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: