基于PLC的AGV控制系统的设计与仿真开题报告
2020-04-13 15:26:52
1. 研究目的与意义(文献综述)
1. 研究目的及意义
agv(automated guided vehicle)自动导引小车,它是一种以铅酸蓄电池为动力源,装有非接触导向装置和独立寻址系统的无人驾驶自动化搬运车辆。根据美国物流协会定义,agv是指装备电磁或光学自动导引装置,能够沿着规定的导引路径行驶,具有停车选择装置、安全保护系统以及各种移动负载功能的运输小车。agv是以蓄电池为动力、装有非接触导向传感器,独立循迹系统的无人驾驶自动运输工具。
agv能在计算机的监控下,按指令自主驾驶,自动沿着既定的导引路径行驶,到达指定地点,完成一系列作业任务。其系统技术和产品已经成为柔性生产线、柔性装配线、仓储物流自动化系统的重要设备和技术。
2. 研究的基本内容与方案
3. 设计的基本内容、目标、拟采用的技术方案
3.1基本内容和目标
论文所要进行的基本研究内容主要从以下三方面展开:
(1)了解AGV的关键技术,了解磁导引传感器的组成及其原理,推导传感器到磁场中心的距离与输出电压的数学关系式,得到偏转角度、偏移距离对电压输出的影响;
(2)对AGV在直线、转弯路径中的纠偏过程进行仿真分析,结合Simulink与GUI技术,设计多参数差速型运动仿真平台,通过对仿真数据进行分析,得到不同的车体轮距、车速对纠偏的影响;
(3)设计基于PLC的AGV路径检测、避障、信号点识别、人机交互程序等功能模块;对控制算法进行分析,设计PID控制器,解决AGV循迹控制中的朝向与转弯问题。
在分析工业环境中AGV小车的系统构成和功能后,提出AGV控制系统设计方案。预计本次设计采用西门子公司的S7-300 PLC作为控制核心,以触摸屏为人机对话窗口,利用光电传感器进行路径跟踪、避障、掉头、自动变轨等功能信号检测。
总体设计目标如下:
样机容易控制,操作简便,运行平稳,安全可靠,能完成工业环境下进行物料运输的任务,受光线以及电磁影响的程度小,控制便捷。
(1)采用光学引导,生产工序改变时,无需重新铺设铁轨,只要改变粘贴轨道纸就可以改变运输车的运行轨迹。此方法简单,导向可靠,变轨成本低。
(2)利用PLC和触摸屏设计的AGV小车控制系统,可以在小车运行过程中随时调整运行速度,操作便利,实时性好;另外,PLC的抗干扰性也比较好,较适应于工厂的各个环境。预留的扩展接口,便于扩展以后的GPS导航等功能。
(3)驱动设计采用轴承连接电动机与车轮,避免了电动机的轴承长时间受压力弯曲变形,本设计传动性能更稳定,电动机的使用寿命加长。
3.2拟采取的技术方案
轮车的驱动机构和运动单元基本上与三轮车相同。图3-1所示是两轮独立驱动,前轮(万向轮)带有辅助轮的方式。当旋转半径为0的时候,由于能绕车体中心旋转,所以有利于在狭窄场所改变方向。
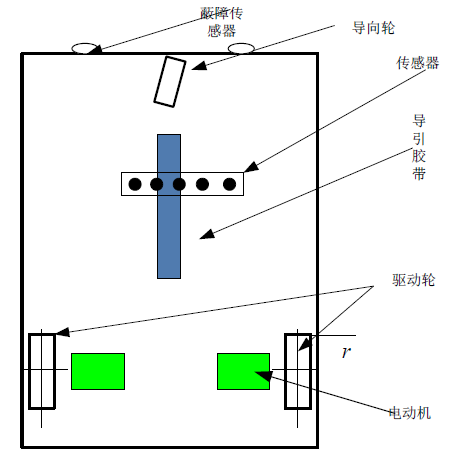
图3-1 车体底盘结构
底部轨迹传感器预计使用红外数字量传感器,将两传感器处于在反光胶带上方两边位置,当小车偏离轨道,就会导致至少一个传感器失去信号,这样就可以将小车偏离轨道的信息传送到PLC,PLC通过调整两电动机的转速使小车回到原轨道上来。
驱动系统拟采用步进电机,步进电机是将电脉冲信号转变为线位移或角位移的开环控制驱动单元。在额定工作的情况下,电机的停止的位置、转速只取决于脉冲信号的脉冲数和频率,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。这是一个线性关系。步进电机无累积误差而只有周期性的误差等特点,使得在位置、速度等控制领域用步进电机来控制变的非常的简单。我们可以直接用PLC内部的PWM指令对步进电机调速。但这样就需要PLC对底部轨迹传感器检测到的模拟量信号进行处理,也就需要增加一个昂贵的模拟量模块。
AGV的路径规划对于保证其安全工作有着重要意义,多年来一直是研究的热点。它研究的是在有障碍物的环境中,如何为AGV或机器人,寻找目标点,合理的避开障碍物,寻找有效合理的路径,以及获取环境信息等。AGV的路径规划有以下三个部分组成:
把AGV在全局坐标中所处的位置与方向称为系统的位姿。
设系统在X,Y方向上的位置分别是![]() ,
,![]() ,其方向角(即运动方向与X轴的夹角)为
,其方向角(即运动方向与X轴的夹角)为![]() 。那么可以用一个三元组
。那么可以用一个三元组![]() 来表示系统的位姿量。如图3-2所示。
来表示系统的位姿量。如图3-2所示。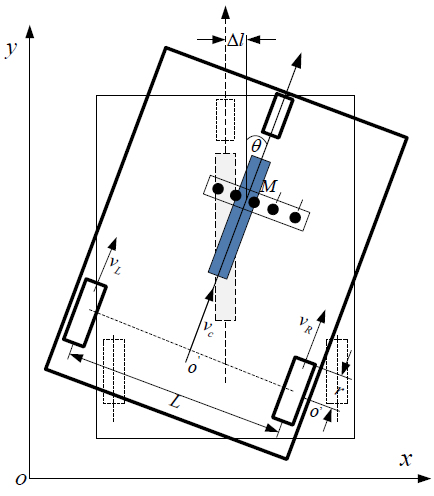
图3-2 AGV系统位姿示意图
路径的描述:路径生成算法产生平滑的路径描述,控制算法根据路径的描述计算相应的参考位姿,并计算出相应的控制量。执行机构由此产生左右伺服电机的控制信号,同时,通过传感器记录并计算得出两轮的位移,然后计算出系统的位置和方向。
路径识别是智能车控制系统的关键技术之一,它是将路况等信息传送给主控制关键途径。AGV路径识别方案制定的优劣,直接影响着AGV的控制效果。在AGV控制系统中,小车有多种循迹方案,如:光电传感器循迹、单独采用摄像头循迹以及摄像头与光电传感器相结合循迹。本文采用光电传感器循迹方案,即红外发射/接收管检测路径方式。在本次设计中,小车行驶的道路环境将被设计为黑色路径和白色的地面背景,只要小车的“眼睛”能判别黑白两种颜色,就能正确识别出黑色路径。
红外光电传感器循迹原理,就是利用一系列红外发光管和接收管来获取路径信息,一个发光管和一个接收管组成一对,红外发光管发出红外光,落在地面反射后被红外接收管接收。在黑白道路中,当发光管发射的红外光遇到白色背景时,由于白色反射光强,反射大部分红外光至接收管,接收管收到大量红外光,导致接收管电流增大;而遇到黑色路径时,由于黑色吸光强,大部分红外光被吸收,以致接收管收到极少的红外光,电流变得很小。因此,通过检测红外接收管的电流或电压的大小来识别光电传感器检测到的路径信息,由此判断出小车的行驶方向。
而AGV的动作由PLC进行控制,大概的流程图如图3-3所示:
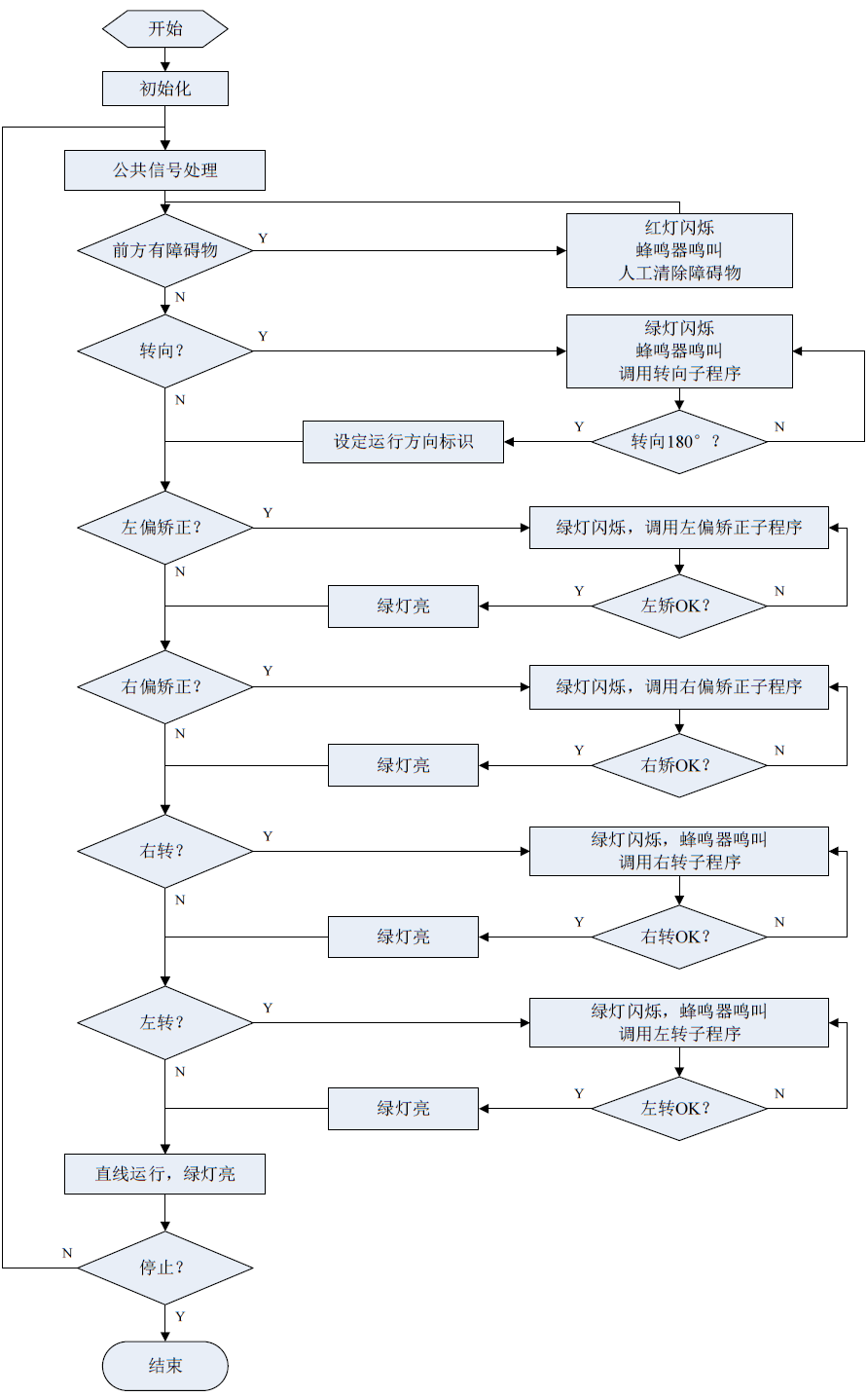
图3-3 PLC控制流程图
根据以上的流程图进行PLC控制程序的编写。
3. 研究计划与安排
4. 进度安排
| 时间 | 周数 | 内容 | 要求 |
| 2018年3月1日-3月15日 | 2.5 | 文献阅读、开题报告 | 外文文献至少5篇,参考文献至少15篇 |
| 2018年3月16日-3月26日 | 1.5 | Matlab和PLC系统学习 | 查阅资料并掌握相关知识 |
| 2018年3月27日-4月2日 | 1 | 相关思路的确定 | 参照相关论文方案确定思路 |
| 2018年4月3日-4月30日 | 4 | 按照开题报告和相关思路进行系统的整体设计 |
|
| 2018年5月1日-5月14日 | 2 | 论文初稿 | 字数字数至少1.5万,其中参考文献至少15篇,外文文献至少5篇 |
| 2018年5月14日-5月22日 | 1 | 论文修改、打印、装订 | 向老师请教,并对论文细节之处进行修改 |
| 2018年5月23日-5月31日 | 1 | 论文送审 | 上交论文,并准备答辩 |
| 2018年6月 | 3 | 论文答辩 |
|
4. 参考文献(12篇以上)
5. 参考文献
[1] 叶菁.磁导式agv控制系统设计与研究[d].武汉:武汉理工大学,2006.



