基于麦克拉姆轮全方位移动小车的设计开题报告
2020-04-12 09:00:17
1. 研究目的与意义(文献综述)
1.研究目的及意义
随着电子信息、机电控制等技术的发展,人们不断尝试将机器人或智能小车等高效率、高精度的工具引入到我们工业的各个领域。现在作为移动小车而开发的移动机构已相当多,仅平面移动而言,移动机构就有轮式、履带式、腿脚式、躯干式等多种形式。轮式移动系统是目前最可靠和应用最广泛的移动系统形式。相对于目前也有应用的其他移动系统形式(履带式、蛇行式等)而言,轮式移动系统的的结构方式相对简单,并且可以在一个平面移动系统里提供平滑、高速、精确的运动效果。
全方位移动是轮式移动系统的一种移动方式,是一种可以“在平面移动系统内具有3个自由度,可以同时独立的在前后、左右和原地旋转三个方向移动”的移动方式,这种移动方式可以使移动系统在平面内获得任意的移动方向。因其具有在不改变自身位姿的情况下向任意方向进行移动的移动特性,非常适合在狭小空间或对小车的机动性要求高的场合,灵活方便的完成多种任务。另外,在需要精确定位或跟踪复杂路径时,利用其可以原地回转的特点,全方位移动小车能适合更为复杂、紧凑的工作环境。一般来说,可实现全方位移动的轮子有球轮、连续切换轮、Mecanum轮、正交轮等。其中,Mecanum轮承载能力大,其轮系悬架系统结构简单、可靠,控制相对简单,因此被较多的应用在工业实际产品中。全方位移动系统具有优异的移动特性,使其越来越受到国内外研究机构以及高校的重视,并因此得到迅速发展。
Mecanum轮由瑞士MecanumAB公司的工程师Bengt Ilon于1973年设计提出,又称为Swedish轮。这种轮子与普通车轮不同,它由一系列沿轮子轮毂圆周均匀排布的小辊子与轮子成一定角度(通常为45°)排列在轮体周围组成,些辊子可绕自身轴线进行旋转,辊子的包络面为圆柱形。轮体的旋转由电机驱动,而辊子则是在地面摩擦力的作用下被动的旋转。由若干个Mecanum轮组成的全方位移动系统,在不需转向机构的情况下,仅通过轮子的旋向与转速的配合,就能够实现平面三自由度运动,并可以做到零回转半径旋转。
鉴于其优秀的运动能力,Mecanum轮式移动系统的应用潜力非常广阔。在空间有限的场所中负责搬运时,可以比普通轮式移动系统节省20%~30%的运动空间;而且可在危险的环境中代替人们承担排雷、巡逻、核操作以及地外星球探索等军事和科研任务,充分发挥它无与伦比的运动优势。鉴于Mecanum轮式移动系统具有良好的可移植性,它必将广泛的应用到人们生活的各个领域。
国内外研究现状
自瑞士工程师Bengt Ilon提出Mecanum轮以后,众多学者就对其展开了各方面的研究,目前的研究主要集中于Mecanum轮辊子几何特征、Mecanum轮结构、轮组布局形式、运动学与动力学建模以及运动控制等方面
辊子几何特征方面。Mecanum轮几何结构特殊,分析其几何特征是车轮设计与运动学、动力学建模的基础。Dickson SL在1991年就给出了辊子的一种表达方式,但表述非常复杂,不能清晰的描述辊子旋转的几何特性,实用性较低;A.Gfrerrer通过画法几何的方法,对Mecanum轮进行了详细的几何分析,推导了辊子曲面及母线的参数方程,它清晰的描述了辊子的几何特性,并讨论了母线方程的几种简化形式,该方法给运动学建模和辊子的精确加工制造带来了方便。目前文献中讨论Mecanum轮时,众多学者大多采用近似母线的形式加工Mecanum轮的辊子,常见的几种辊子母线近似形式有:等速螺旋线、椭圆弧、圆弧。王一治将辊子曲面的母线等效为椭圆形,并给出了表达方式;吕伟文、赵言正等将辊子母线等效为等速螺旋线;杨铭、浙江大学的贾官帅等使用解析几何的方法推导了辊子的母线方程,得出不同近似形式下的表达式,并比较了不同形式的近似母线与实际母线的误差。
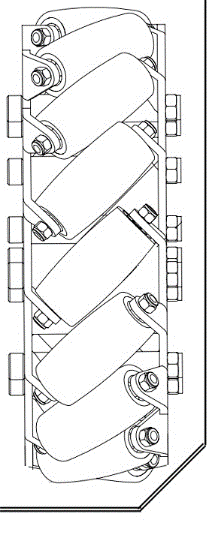
Mecanum轮结构方面。自瑞士工程师Bengt Ilon提出如图1-1所示的Mecanum车轮结构后,众多学者也对Mecanum轮结构进行了不断的改进设计。如图1-2所示,传统的Mecanum轮在不平地面或斜坡上会出现Mecanum轮边沿而非辊子接触地面,从而出现轮子不能正常运作的情况,BengtIlon对于此情况提出了如图1-3所示的一种改进方式,即将辊子从中间分开进行安装以保证辊子始终与工作平面正确接触。Harris在其专利中描述了一种Mecanum轮辊子曲线的改进设计,减少了轮子在行进过程中的振动与竖直方向高度的变化幅度,提高了Mecanum轮在实际应用中允许的运动速度;Olaf Diegel等为提高基于Mecanum轮移动平台的效率提出了两种改进形式:一是设计一种顶紧机构,使辊子在前进时不能旋转,消除移动平台前进后退时辊子旋转损失的能量;二是使辊子相对于轮子的角度可以在一定范围内变化,使辊子可以针对运行情况自主调整至与前进方向最优夹角。高光敏等针对Mecanum轮的辊子易滑动、磨损、承载能力不高的问题,将轮廓曲线呈多边形的辊子与轮毂垂直排布,设计一种新型全方位移动机构。

图1-1 传统Mecanum轮结构
| 
|
| 图1-2 传统Mecanum轮斜坡上情形 | 图1-3 改进的Mecanum轮结构 |
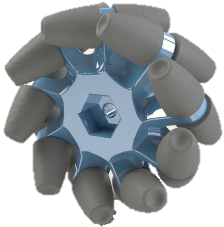
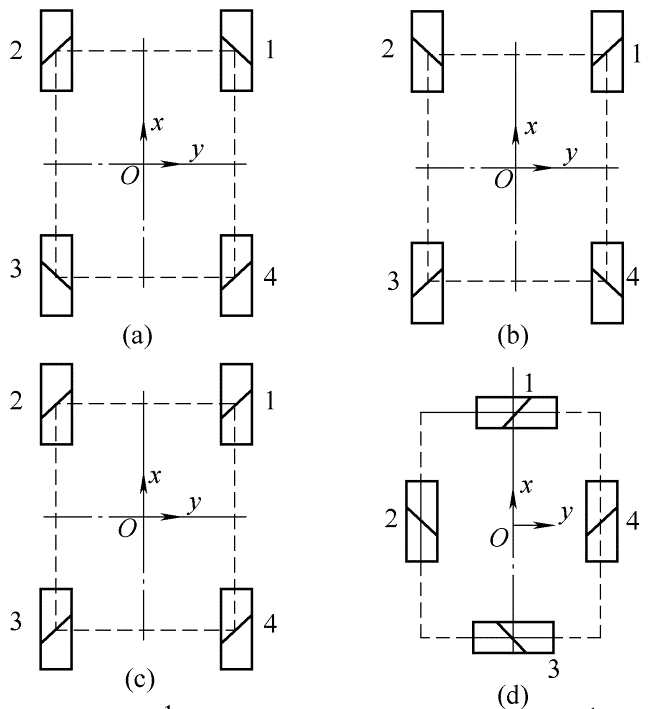
Mecanum轮全方位移动系统轮组布局结构形式方面。轮组布局形式一般采用三轮或四轮结构,三轮结构中轮子相互之间夹角为120°(如图1-4所示),四轮结构中由于Mecanum轮的特殊结构,轮子行走的平面可以与行走方向垂直安装,因此有多种排布方式,王一治分析并建立了Mecanum四轮系统的运动学模型,分析了基于Mecanum轮的四轮移动平台全方位运动的条件,并列举和分析对比了具有代表性的Mecanum轮四轮结构布局形式。总体而言,对于车轮结构研究的目的在于提高移动系统驱动性能及其可控性,增加其载重能力,提高Mecanum轮平台的移动效率和Mecanum轮移动系统的环境适应能力等。
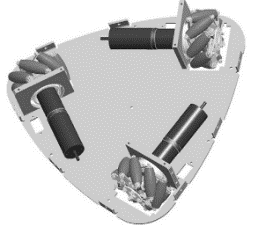
图1-4 Mecanum轮三轮移动结构
运动学与动力学模型方面。建立基于Mecanum轮全方位移动平台的运动学与动力学模型通常有两种方法:基于矢量的方法和基于变换的方法。加拿大的Jorge A基于旋量理论推导了Mecanum四轮系统的运动学方程,并且建立了n个Mecanum轮移动平台的通用运动学模型,这种分析方法称为矢量分析方法。A.Gfrerrer根据其建立的Mecanum轮结构模型推导了基于Mecanum轮移动系统考虑辊子形状时的精确的运动学模型。J.Angeles利用矢量法推导了11轮Mecanum全方位移动平台的通用运动学方程。G.Campion等利用矩阵变换推导了三维运动方程。
2. 研究的基本内容与方案
基本内容和目标
本文以四轮Mecanum轮全向移动平台为研究对象,对其几何机构、运动特征、动力学等方面展开研究,所要进行的研究的基本内容主要包括以下五个方面:
(1)推导分析Mecanum轮的辊子母线方程,其几何结构与运动特征;
(2)不同近似方式(等速螺旋线、椭圆弧、圆弧)下的辊子母线比较;
(3)分析Mecanum轮的运动特性及Mecanum轮四轮结构全方位移动的原理和基本条件。
(4)不同的Mecanum轮四轮结构布局形式优选;
(5)使用合理布局形式的Mecanum轮四轮结构,设计简单、完整的移动小车。
论文研究的目标为通过对已有Mecanum轮的几何结构分析,得出近似效果较佳的方式,以此基础来建立辊子模型及不同组合的Mecanum轮四轮结构布局形式,利用ADAMS软件进行运动学仿真,得出较为合理的结构布局形式,最后进行移动小车的机械、电气等系统的设计
3.2拟采取的技术方案
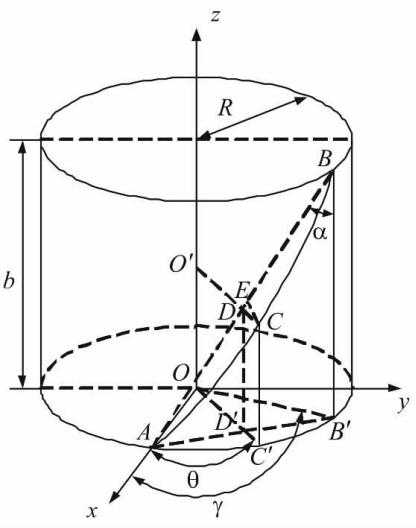
本论文首先分析Mecanum轮辊子的母线生成原理,分析其几何结构(如图1-5),推导出其理论母线方程;后使用当前学者使用较多的三种对理论母线进行近似处理的方法(螺旋线、椭圆弧、圆弧)推导出近似母线方程,并根据近似母线方程通过Pro/E三维软件建立辊子三维模型(如图1-6),分别与理论母线进行误差比较,通过此手段可以分析出每种近似方法的优缺点及近似效果的优劣。
| 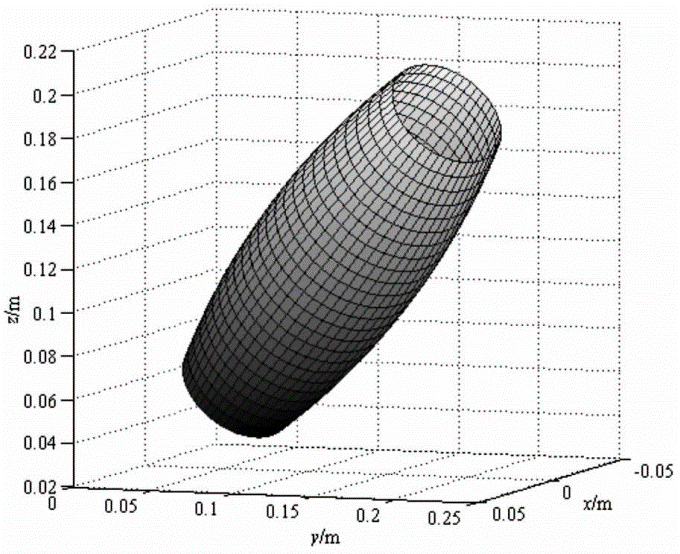 |
| 图1-5 Mecanum轮辊子母线理论几何结构 | 图1-6 Mecanum轮辊子三维模型 |
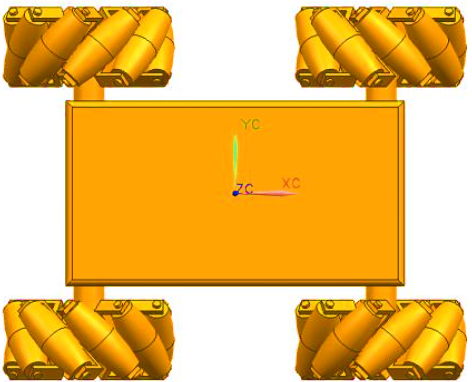
分析单个Mecanum轮的运动特性,并从上述三种近似处理后的模型中取其中一种建立不同排布形式的Mecanum轮四轮全方位移动平台模型(如图1-7),使用ADAMS软件进行运动学分析(如图1-8),通过摩擦力、加速度等方面的比较,得到Mecanum轮四轮全方位移动平台可以全方位移动的基本条件及较优的排布方式。
| 
|
| 图1-7 Mecanum轮四轮系统结构布局 | 图1-8 Mecanum轮移动机构仿真 |
最后使用合理的布局形式,设计简单完整的Mecanum轮四轮全方位移动小车,包括对小车的机械、电气等系统的设计。
3. 研究计划与安排
| 时间 | 周数 | 内容 | 要求 |
| 2018.3.1-3.15 | 2.5 | 文献阅读、外文文献翻译、开题报告 | 外文文献至少5篇,参考文献至少15篇 |
| 2018.3.16-3.26 | 1.5 | Pro/E和ADAMS学习、建立Mecanum轮及四轮机构的三维模型 | 查阅资料并掌握相关知识 |
| 2018.3.27-4.2 | 1 | 相关思路的确定 | 参照相关论文方案确定思路 |
| 2018.4.3-4.30 | 4 | 论文的整体设计 | 按照开题报告和相关思路进行 |
| 2018.5.1-5.14 | 2 | 论文初稿 | 字数字数至少1.5万,其中参考文献至少15篇,外文文献至少5篇 |
| 2018.5.14-5.22 | 1 | 论文修改、打印、装订 | 向老师请教,并对论文细节之处进行修改 |
| 2018.5.23-5.31 | 1 | 论文送审 | 上交论文,并准备答辩 |
| 2018.6 | 3 | 论文答辩 |
|
4. 参考文献(12篇以上)
[1] ilon be.directionally stable self propelled vehicle: u.s. 3746112[p]. 1973-07-17.
[2] dickerson sl,lapin bd.control of nll omni—directional roboticvehicle with mecanu- mwheels[c]:proceedings ofthetelesystems conference,atlanta,1991.ieee:323-328.
[3] angeles j. fundamentals ofrobotic mechanical systems: theory, methods, and algorit- hms[m]. springer,2003.



