自动化立体仓库中多机器人装箱系统设计外文翻译资料
2022-09-03 23:04:14

英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
自动化立体仓库中多机器人装箱系统设计
S. J. You and S. H. Ji
韩国工业技术研究院, Sa-3-dong, Sangrok-gu, Ansan-si, KyungKi-do,韩国 {Sjyou21, robot91}@kitech.re.kr
|
关键词: |
自动化立体仓库, 装箱系统, 多机器人, 移动机器人的运动规划, 碰撞模型 |
|
摘录: |
当我们在装箱系统中使用移动机器人,很有可能实现用更少的时间和成本来完成对供应链的重新配置。因此,许多公司开始在它们自己的仓库中使用移动机器人作为他们新的载体。然而,由于定位困难,安全问题不能保障,以及装箱的环境的狭窄,使得利用室内的服务机器人作为载体变得困难重重 。因此,我们计划采用一种实用的解决方案使多机器人装箱系统在自动化仓库能够合理运行,该方案能够为超过 3个的 多机器人提供一个合理的、安全的、 计算时间准确的实际应用程序。首先,我们会介绍装箱系统的设计标准。第二,我们会给出一些机器人的机械零件草图的建议。最后,提出了对多机器人自动仓库机器人设计与碰撞运动的规划方案。 |
简介
多智能体运动规划是机器人领域中最有趣和重要的研究之一 。机器人技术的进步导致了对各种专用机器人的需求与日俱增。举个例子, 当我们在装箱系统中使用移动机器人,很有可能实现用更少的时间和成本来完成对供应链的重新配置。 许多公司开始在它们自己的仓库中使用移动机器人作为他们新的载体。然而,由于定位困难,安全问题不能保障,以及装箱的环境的狭窄,使得利用室内的服务机器人作为载体变得困难重重 。因此,我们计划采用一种实用的解决方案使多机器人装箱系统在自动化仓库能够合理运行,该方案能够为超过 3个的 多机器人提供一个合理的、安全的、 计算时间准确的实际应用程序。首先,我们会介绍装箱系统的设计标准。第二,我们会给出一些机器人的机械零件草图的建议。最后,提出了对多机器人自动仓库机器人设计与碰撞运动的规划方案。最后,提出管理自动仓库机器人设计中的多机器人碰撞运动规划的方法。
由于解决代理之间的冲突时出现了许多技术性的问题,多智能体运动规划仍然是研究中的一个具有挑战性领域。集中式的方案必须面对一些诸如维度、 复杂性、 计算难度,诅咒和 NP 难题 (康力,1988年);(Akella,2002年)等问题。
为了解决方案中出现的这些问题, 我们计划通过扩展碰撞映射的方式来实现 (Ji, 2007). 我们修改了碰撞映射,这样的方法可以使 N 代理商根据从最高的优先级来实现的无碰撞运作。尽管如此,在这个方案中,关于碰撞区域设备之间的相互关系仍旧没有进行分析归纳。
在这个方面,本文关于碰撞区域的相互关系进行了分析,并根据所研究的碰撞特征,这个特征就如同可以表达多代理的旅游功能(M,D)网络模型所展示的那样。(M,D) 网络模型不仅仅可以表达两个代理之间的碰撞特性,还可以表示超过三个代理商之间的复杂关系。同样,可以设计多代理的无碰撞运作和用 (M,D),可以求操作的完成时间的代理商网络模型。同样的,无碰撞运行的多重代理可以被设计出来,并且可以通过(M,D)网络模型来来演示代理的完成时间。
本文的所提及的其余部分内容具体如下 ︰ 第 二章节主要定义了我们的装箱系统和一些机器人的机械图纸的设计标准。第三章节 所呈现的内容是本文重点将的关键技术 — — 碰撞模型。第 四章 节主要是提供了一种基于(M,D)网络模型如何实现无碰撞运作的多代理文的所提及的其余部分内容具体如下 ︰ 第 二章节主要定义了我们的装箱系统和一些机器人的机械图纸的设计标准。第三章节 所呈现的内容是本文重点将的关键技术 — — 碰撞模型。第 四章 节主要是提供了的方法。最后,第五节是对于全篇的总结。
装箱系统和机械零件
立体仓库
我们的立体仓库基本内容就如图1中所展示的那样.仓库里面有大量的输送带,存储站点和一个充电站。
众多的机器人抓取货物放到输送带上,然后输送带将这些货物移送到存储站点,并将货物存放到预定存放站点的箱子中。 在整个工作过程中,如果出现电力不足或者没有工作任务时,这些个机器人便会移动到充电站进行充电休整。
我们假设在仓库的任何地方都能进行通信并且有足够的网络渠道。在此基础之上,智能空间可以提供给一个中央计划者与运动规划和运动监测基本和必要信息。此信息包含了所有代理设备的运动状态以及所有静态和动态障碍物的位置信息 (李,2000年);(典,2003年)。
全球离线路径规划 (中央计划者) 可以给所有代理设备的安全的行进路径。在本篇文章中,安全路径含义就是如果一个代理设备拥有自身安全的路径,那么将会没有代理设备会出现与其它设备的起始位置和终点的路径相交叉的情况。正因为如此,就可能在各个代理设备的路径之间出现交点的情形。
图1: 立体仓库
装箱系统
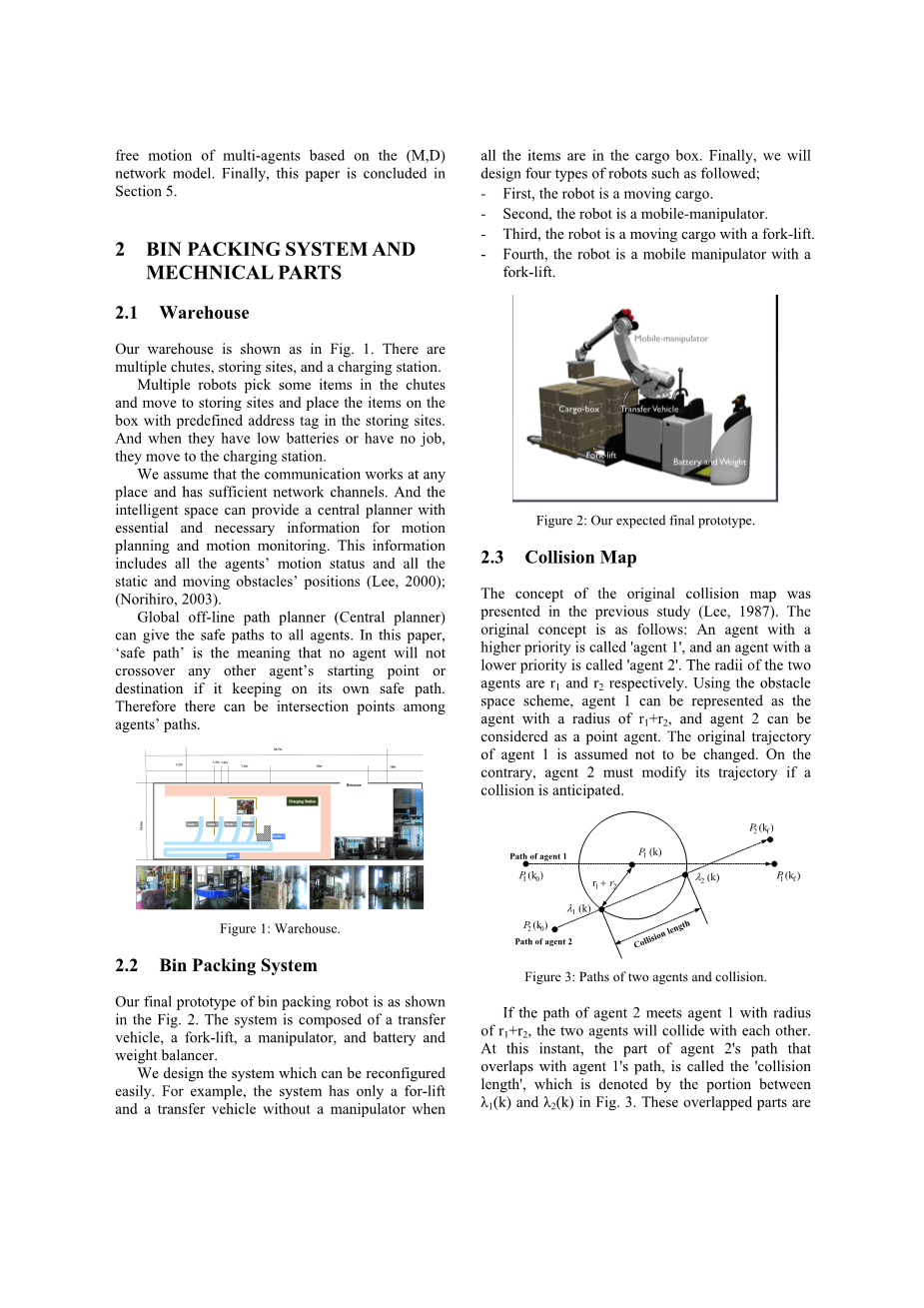
我们装箱机器人的模型的最终的形态就如同图2中所示的那样。并且,本系统主要是由转运车、 叉车、 机械手,电池和重量平衡器组成。
我们所设计的系统能够轻松地实现重新配置。例如,当所有的货物都放到或相中时,该系统具有一个唯一的升降和转移的无操纵车辆。最后,我们将会设计如下所述的四种类型的机器人:
第一种是可以直接移动货物的机器人;
第二种是可以装备了移动机械手的机器人;
第三种是可以通过叉式升降机移动货物的机器人;
第四种是装备了叉车移动机械手的机器人。
图2:最终预期的机器人原型
碰撞地图
在过去的研究中 (李,1987年) 提出了原始的碰撞地图的概念。最初的概念内容如下所示:具有较高优先级的代理将会称为 代理 1,具有较低的优先级的代理将会被称为 代理 2。两个代理的半径分别为 r1和 r2 。使用障碍空间的方案,代理 1的半径 可以表示为r1 r2,代理 2 可被视为一个点。代理 1 的原始轨迹可以被假定为没有改变。相反的,如果碰撞产生了冲突,代理 2将必须修改其运动的轨迹。
图3: 两个代理和碰撞的运动轨迹
如果代理 2 的运动路径满足代理 1 半径为 r1 r2,这两种代理将会相互碰撞。与此同时,代理 2 的路径的一部分与代理 1 的路径重叠,这部分的路径叫做碰撞长度可以由 lambda;1(k) 与 lambda;2(k) 在图 3 中的部分来表示。这些重叠的部分在每一刻的采样时间 k被审查用来打造 碰撞区域。如果代理2的 TLVSTC (全部名称是traveled length versus servo )正好到达该区域时,这两个代理将会在原始轨迹的前期之下产生相互的碰撞。 他们碰撞的过程如图4中展示的那样。在这个图中,垂直轴表示的是代理 2 的行程长度,水平轴表示的是代理2运行过程中经过的时间。
图 4: TLVSTC 和碰撞区间
因为用数学化的方法来表示在碰撞区域的边界线是很难的,所以“碰撞盒子”的概念被引用了出来。它的具体含义可以在图4中表示出来。在图4中,ks 是用来指当代理1开始覆盖代理2路径的这段时间。相对的 ke 表示的是代理1离开代理2的路径的这段时间。ls 和 le 分别指的是在碰撞区域中最短和最长的碰撞长度。
扩展碰撞地图的方法时会考虑两个以上的代理,这些代理的工作区域会出现许多的交点。正因如此,这些交点和它们相应的碰撞区域都应该加以说明。 一个交点可以用如下的符号来表示
Iijk ;i j (1)
其中i和 j代表的是即将确认的代理的数量,并且,k表示的是在代理i从起点的路径中交点的顺序数字。相对应的碰撞区域的交点用Rkij来表示。
碰撞模型
碰撞的条件
我们假设A1和A2之间有交点,这里的A2在图5(a)中没有A1重要。围绕交叉点两个代理之间的可能的位置关系如下:第一种可能 ,A1在A2进入区域(Case1)之前穿过了交叉区域。第二种可能是代理之间的冲突区域 (Case2). 第三种可能是A1恰好在A2出现在区域时到达该区域。在图3中出现的与碰撞盒子相关的代理 的状态可以在图5(b)看出来, 其中L1和L2分别代表的是最小行进长度和在A 2的路径中从开始位置到交叉路口区域的最大长度。
图5: 两个代理之间的碰撞重叠区间
与碰撞区域相关的时间因素包含图3(b)中的Tk(k=1,2,3,4) 都详细的列在表 I中, 同时,我们也定义了M和D这两个变量,主要作用是描述代理间的碰撞状态。
表1: 与碰撞区域相关的因素
|
变量 |
变量的含义 |
|
T1 |
当A 1到达碰撞区域的时刻 |
|
T2 |
当A 2到达碰撞区域的时刻 |
|
T3 |
当A 2退出碰撞区域的时间 |
|
T4 |
当A 2退出碰撞区域的时间 |
|
T1d |
A1延迟开始的时间 |
|
T2d |
A2延迟开始的时间 |
|
M |
从T3到T1 的时间之和 |
|
D |
从T4到T2的时间总和 |
我们可以通过与碰撞区域相关的变量,M和D来预测代理之间是否产生碰撞。同时我们可以定义代理的无碰撞导航条件,具体条件如下所示:
[无碰撞导航条件]. 当一个代理与其他拥有较高优先级的代理有不止一个交点时,它将不会有任何的重叠区域,所有的碰撞因素都是积极的。
时间延迟特性的影响
当A 2(具有较低优先级的代理)的出发延迟是由于T2d既无路径形状变化也没有速度曲线变化的时候,它的目的是为了避免与A1产生碰撞。此时,时间变量出现了如下所示的一些变化:
由于这些代理保持着它们自己的路径形状,同时A1也保持着它的速度曲线不变,所以不管是T1还是T4 都不会由于A2的出发延误而受到影响。T2和 T4 它们都和代理的路径形状有关,它们与A2的TLVSTC都会随着T2 T2d 以及 T3 T2d 的变化而改变,那是由于A2的TLVSTC 恰好通过T2d 的作用移动到了右边,正如图3(b)中所显示的那样。因此,时间延迟特性的影响因素被定义为Eq.(2)中显示的那样。
Mrsquo; = M T2d
(2) Drsquo; = D – T2d
在这之中,K0,是由代理的路径形状和路线曲线开始就确定的常数。由于Eq.(2)中M的减少和D的增长,A2于是就被延时出发了。
碰撞模型
我们当前所描述的碰撞模型是用来表示代理之间的冲突关系和预测它们中可能出现的碰撞。与此同时,所有由于无碰撞导航产生的代理的最小的延迟出发的时间都可以从碰撞模型中提取出来。碰撞模型的要素都在表2中详细的定义了出来。
现在,我们可以图4中的案例中的碰撞模型表述为网络模型,正如图5中所显示的那样。在图4中展示了三个代理(代理1、代理2和代理3)的路径形状。所以,我们可以假设所有的代理的半径都是5米并且他们的速度分别是1米/分、2米/分和1米/分。我们同样可以假设他们不需要时间去加速、减速或者转向。不仅如此,我们还可以假设他们的优先级顺序就是1-2-3。
P5(50,0) path of agent 3 : P3 - P6 - P7 - P8scale : ( m, m )
图 6: 三个代理之间的交点
碰撞网络的模型具体的特征列如下所示: V = {1,2,3}, P=(1,2,3), E={(2,1,1), (3,1,1), (3,1,2), (3,2,1)}. L和 T 在图5中显示出来了。
表2:碰撞模型的要素列表
|
符号 |
符号的含义 |
|
V |
节 剩余内容已隐藏,支付完成后下载完整资料 资料编号:[147406],资料为PDF文档或Word文档,PDF文档可免费转换为Word |



