一种非接触式磁弹性扭矩传感器分析外文翻译资料
2022-09-26 16:45:12
英语原文共 15 页,剩余内容已隐藏,支付完成后下载完整资料
一种非接触式磁弹性扭矩传感器分析
磁弹性扭矩传感器测量的结果是将一个非磁性轴的扭矩应变转化为可测磁场的变化量。这个磁场是由一个涂覆到轴的圆周上的薄的磁致伸缩层产生的。该层被磁化,并具有初始残余应变。当这根轴转动时,这个磁致伸缩层的磁场发生变化,反应出轴的扭矩变化。由磁致伸缩层产生的磁场与磁化改变,这可以通过磁力来感测,用来监测在轴上的转矩。在本文中,采用现象学的理论来预测传感器的性能发展。该理论可用来预测传感器的磁场分布,例如磁性涂层的物理性能作用,其残余应变和所施加的转矩。它能够使得传感器性能的分析参数化,并且更加快速,对新型非接触式扭矩传感器的优化和发展是有益的。
1.介绍
大量的应用程序,将受益于在一个没有接触的结构构件上的力矩的感应能力,并且不需要增加额外的结构组件系统。精确的转矩检测在许多系统中都是至关重要的,从而确保能够进行精确的机械控制。
扭矩传感的一个主要应用是在汽车转向系统中。目前,在这样的系统的转向轴中需要添加些扭矩传感装置和过转矩保护元件。Garshelis提出了在不需要中断的轴中安装被动扭矩传感器/传感器。操作该传感器是基于涂覆到磁性扭矩轴上的激发诱导磁层内的的磁化旋转。该涂层被压在基轴上,并通过一个电流将其磁化,以使其沿轴方向饱和,其磁化方向是沿圆周方向的当没有电流时或者电流保持静态时,由磁层创造出磁化强度仍是沿着圆周方向的,并且此时的磁场为零。
当施加力矩在轴的应力涂层时,在其里面的磁各向异性将发生变化。具体而言,所施加的扭矩产生应力引起的易磁化轴的主应力是沿45°方向。因此,整体磁化向量重定向走向新的易磁化轴。由于磁化旋转,导致涂层发展的轴向偏振,从而产生表面磁极。这些磁极产生磁场,可以被附近的磁场传感装置检测到。
上述所述传感器在实际使用中有两个重要的要求,必须满足:
- 测得的被涂层产生的磁场必须与所施加的转矩成正比。
- 所施加的转矩的指示,必须是明确的(一个单一的测量的轴向磁场的值对应于所施加的转矩的一个单一的值),这意味着B-曲线没有滞后作用。
这项工作探讨的是由在非磁性基底热喷涂镍制成的磁传感器的运转,其中静应力的状态是由在涂层的底部的温度和施加的应力来调整的。
2.理论
立方材料的磁能密度,包括磁晶能量,磁弹性能量、静磁能量,电场领域交互的能量。
(1)
其中K1和K2是的磁各向异性常数,B1及B2是磁弹性系数,eij是应变分量, 和 是沿三个坐标轴的磁化方向余弦,M是磁化强度,Hd是退磁磁场,Ha的施加电场。
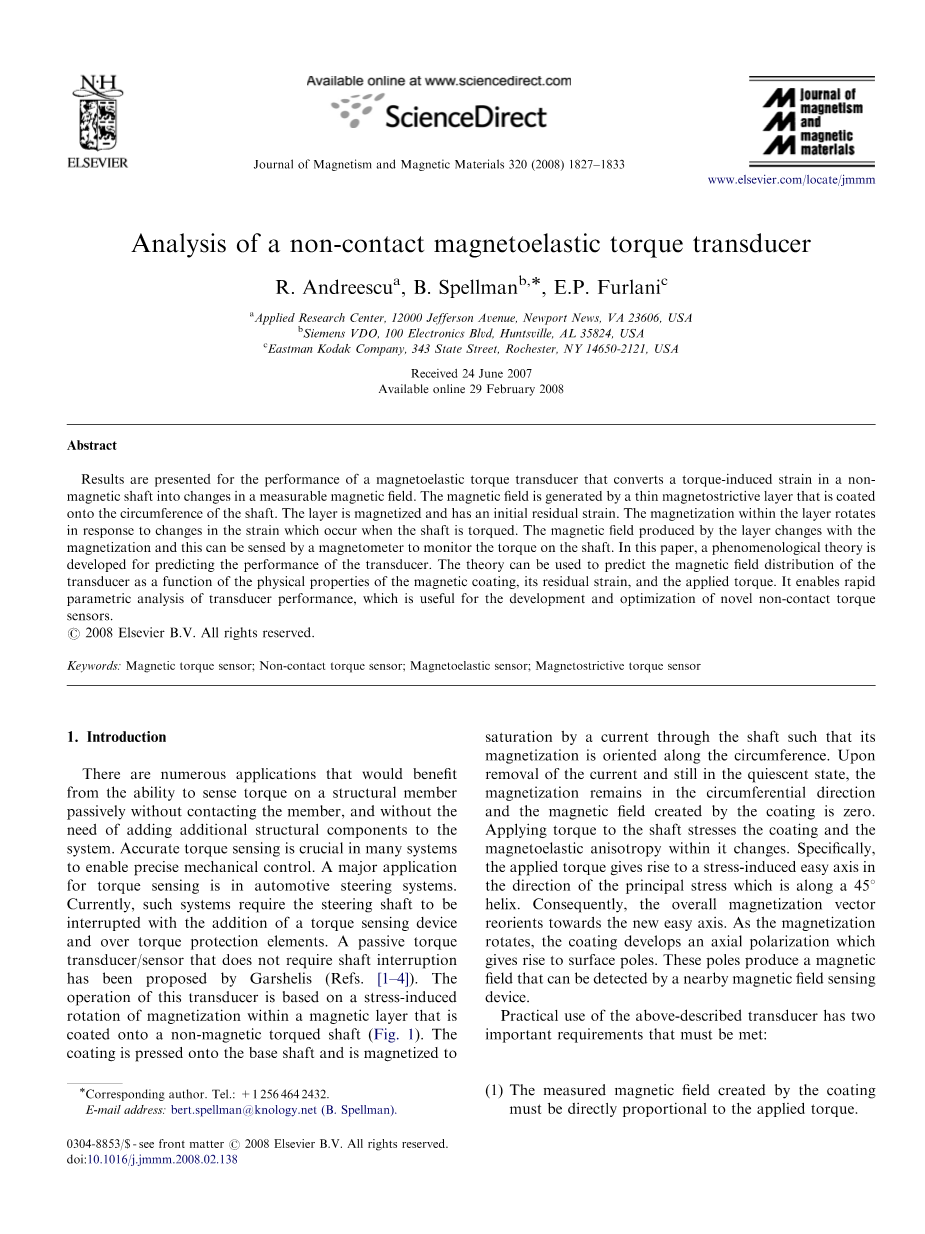
在一个单晶层立方对称的圆筒状基板上,如图1所示,如果晶格立方体边缘平行于圆柱的单位向量,那么对于, ,ez,就可以得到一个很近似的磁自由能密度:
(2)
, 和 是沿着,和磁化强度的方向余弦。和是退磁因子,Ha是图1中脉冲电流产生的外加磁场I.它的切向、轴向和径向应变是由通过热处理和涂装工艺的涂层引起的,并且将在以下考虑。
另一方面,应变非常小可以忽略不计。通过涂层中的轴在拉伸或压缩和改变其温度,使得静态轴向,径向和圆周应变可以采取正负的值。这些值是始终不恒定的涂层的厚度,但是,对于本研究的目的,可以采取沿半径求取平均值的方法来使用。应变在方程(2)是涂层的应用扭矩T(如果轴的扭曲不超出弹性极限),并且当扭矩消失的瞬间它就会消失。
众所周知,从弹性方面来说,剪应变取决于轴和涂层性能的转矩。也就是
(3)
R是Di/2 与DO/2的和(图1)。在方程(3)中,Gc是涂层的弹性模量,Gs是轴扭转弹性模量,是涂层惯性矩,是轴转动惯量。DOS =Di 和Dis是轴的内外径(Dis不是在图1中显示的那个)。公式(3)显示出不是恒定的涂层厚度,在以下中将以Di/2 与DO/2和的平均值来使用。
如果立方体晶格的边缘旋转三次后平行于, ,ez,即角g1对应于,角g2对应于,角g3对应于ez,它的旋转晶格的能量为:
在方程4中,新的磁化的方向余弦相对于旋转的立方晶格的边缘,应变相对于旋转格并且可以表示为:
上式是旋转矩阵,[ ]T表示矩阵。
下一步,为表示磁化方向的, ,ez,,角度和 定义为:
将方程(7)中的带入方程(5)得到。在方程(6)中eij是指定的,然后带入方程(4),得到涂层结构中的自由能。
然后以g1, g2, g3, t, Ha作为参数,自由能可以被最小化,并且在方向上得到给定晶体的磁化方向。
当关注的范围是[-8 8]N m(即:在-8至8N m的范围内的扭矩需要准确测量)。在实际系统中,当扭矩达到很高时(到达400N m),
可以在系统中出现,但是这些扭矩不能改变传感器的结构。
在这个报告中,实验过程中在研究其工作范围前磁化系统应用了很高的扭矩(达到400N m)。预测传感器的性能(基本上是一个能量最小化方法)的理论可以根据以下的实验步骤的方式来作描述(在没有转矩的情况下,磁化强度被轴的电流脉冲化,然后是设置为plusmn;400个正力矩,接下来是在B-t的曲线图上,其最大施加扭矩为8N m)。
在系统的演化过程中(即Ha和t在不断变化)能量谱也是在不断变化中,在任何时刻磁化方向由最低能量的方向来决定。对于一个给定的值Ha和t,这个系统将占据最小能量状态中很多可能中的一种,但是不一定是绝对最小能量,它是过去的扭矩场,确定这些被实际占用的状态。在某些情况下,该系统存在局部极小值(元稳定状态),它不能离开去占据绝对最小的状态,因此,系统将呈现滞后。
最初的参数g1, g2, g3, 是固定的。施加的扭矩t也是固定的并且为0,施加的磁场也是固定的,是个很大的值,在没有施加扭矩下系统是处于稳定的。当自由能具有唯一的最小量即= 90° 和 =90°.时是最初的状态。然后Ha逐步减少至零并且保持t=0。在这个过程中,系统处于最小能量状态,并指出了磁化方向。之后,继续保持Ha等于零,t是变化的,其值取决于(t) 和 (t)。(t) 和 (t)这两个值是可以计算的,并且在t从-400到400N m为一个周期(对于和 ,减小u,并且考虑在以上描述的方式中系统演化最接近极小值)。
最后,(t) 和 (t)之间的关系是可以计算的,同时t的周期为-8到8N m。
以上(t) 和 (t)值得获得通常是取决于磁化矢量的方向,那么在涂层外的一个观察点 O的传感器的磁场是计算出的,利用下列磁场的模型
在以上公式中。并且时体积和表面电荷密度.n是单位向量的法向方向;曲面积分是计算涂层表面的,并且体积积分进行计算涂层体积V。很容易证明0, and that .因此(9)方程式可以化简为:
式中方程(10)可以采用多种方法进行计算。对于径向和轴向分量Br 和 Bax可以参考文献7。
其次,假设系统的状态可以由许多单晶格的叠加来近似接近,像那些在空间出现的一些随机方向。B((t),(t))取决于计算机计算的729个方向。然后从这些729个方向中取平均值来描绘B(t)曲线。
3.结论
在这一节中,该理论被应用于一个实际的传感器中。磁性涂层被认为是具有以下尺寸的晶体镍:Di =28.5 mm, DO =29.5 mm, 和L =44.7 mm.参考文献[6、8]中给出了K1=-4500 J/m3, K2=-2300 J/m3, B1=6.2 times; 106N/m2, B2=4.3 times; 106N/m2,
MS=450,000 A/m, Ndz=0.012, Ndr=0.98, GS=76.5 GPa, G=76 GPa.的平均值由方程(3)给出,对于r在r0和r1之间时(t) =2.66times; 10-6t,(t)的量纲是m/m,t的量纲是N m.将这些值带入方程式(8),然后考虑系统的演变,来求得最小值。参数 和 的扭矩图可以由晶体晶格的各种方向{g1, g2, g3}和各种附加载的拉紧力.绘制出来。利用式(10),磁场扭矩曲线可以被计算出然后来所选择方向和预加载应变。
在图二中,表达了轴向残余应变是如何影响传感器的性能的。径向和切向的残余应变是固定的(5000 , =6000 拉紧力), 2000轴向残余应变的变化为图(a),当1000时轴向残余应变的变化为图(b),当 -1380时,轴向残余应变的变化为图(c)。
图2表示出了当切向残余应变为5000 ,径向残余应力6000,轴向残余应变为 2000 时的Bax–t之间的关系。观测点O位于中间,在距离涂层表面0.25mm处(看图1)。
可以看出,在循环载荷的作用下磁场线是直线,并且,这方面没有滞后作用,在这种方式下,第一章节的要求得到了满足。传感器的灵敏度s(即Bax–t曲线的斜率)是0.014 G/N m。
图2
图2(b)表示出了和图2(a)类似的在具有剩余切向应变和径向应变时Bax–t之间的关系,并且轴向应变为1000。Bax–t曲线仍然是直线并且没有滞后作用,传感器的灵敏度为0.026 G/N m.
从图2a和b中来看,对于固定的切向和径向应变,如果轴向应变减小的话,则传感器的灵敏度增加。造成这样的原因是在图2(a)中轴向应变是正的并且轴向方向难以变化,在图2(b)中,轴向应变是负值,因此轴向方向变得容易变化,使得扭矩旋转磁化从切线方向更为容易。图2c显示了轴向应变为1380,残余径向应变和径向应变和图2(a)和(b)一样时的轴向磁场扭矩的关系。
正如预期的那样,灵敏度(图2C曲线Bax–t平均斜率)继续增加(这是大于图2b中的)但曲线Bax–t 出了滞后并且章节1中的要求不再得到满足。
在这种情况下出现是因为轴向的易磁化轴(连同切向的易磁化轴和晶体的各向异性)造成了t=0的两个极小值,这个系统是交替进行的(当系统通过正值得到t=0的状态时,另一个系统则通过负值得到t=0的状态)。
最后,从图二来看,降低轴向应变,这是降低拉伸(正)轴向应变或增加的压缩(负)轴向应变,从而导致敏感性增加,但当降低的轴向应变超出一定值后则导致滞后现象,这使得转矩传感器的涂层缺少。
图3
从图3中显示出了径向残余应变是如何影响传感器的性能的。切向残余应变和轴向残余应变是固定的(,=-2640),但是径向残余应变是变化的即:当=-6000时的图(a), = 0 的图和 =2000时的图(c). 从图3可以看出,径向残余应变对传感器性能的影响是类似于残余轴向应变对传感器的影响:减少的径向应变导致灵敏度的增加,但当降低它超出了一定值时会导致出现滞后现象。
图4
图4显示出了在四种不同的径向残余应变下(=6000,=2000,=0,和=-6000)的轴向残余应变的函数的灵敏度。在图四中切向残余应变是固定的即 =-5000。在图四的右区(较大的拉伸轴向应变)在轴向方向则是较难磁化的轴,而在切向则是较容易磁化的轴。结果施加的扭矩则很难使得磁场发生旋转并且灵敏度也极小。减小轴向应变会导致轴的轴向力减弱,所施加的力矩会使磁场更容易旋转,而且灵敏度也会增大。图4中的A点对应于图2A的曲线Bax–T,在图四中的B点对应于图2b的曲线Bax–T。
图4中最左边的点显示了在曲线Bax–t上的轴向压缩应变。例如,图四a中显示的=5000和6000,最大的轴向应变系统显示出最大的轴向应变 =-1305(点c)没有滞后。当低于-1305时,灵敏度仍然增加,但是曲线Bax–t出现滞后,这使得扭矩传感器的磁化涂层不足。在图2c中显示的一个例子是当
少于-1305时的Bax–t曲线。
为了获得较大的没有延迟的灵敏度,必须预装非常大的负的径向应变。例如,在图4d点D中一个很大的负的径向应变(=-6000)导致了灵敏度达到了0.065 G/N m(如果预装轴向应变 =-3800);如果径向应变只有2000(图四b),这最大的灵敏度可能也只有0.04 G/N m(点E)。
图5
最后,它对确定该涂层所产生的磁场分布,对确定传感器的传感器定位的最佳位置是有益的。为了达到这个目的,图5中显示了残余应变(=-5000 ,
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[150592],资料为PDF文档或Word文档,PDF文档可免费转换为Word



