包含摩擦和跛行效应补偿的电子节气门控制策略外文翻译资料
2021-12-20 21:45:33
英语原文共 14 页
包含摩擦和跛行效应补偿的电子节气门控制策略
摘要
电子节气门是一种低功率直流伺服驱动器,用于定位节流板。它在现代汽车发动机中的应用导致车辆驾驶性能,燃油经济性和排放的改进。传动摩擦和复位弹簧的跛行 - 非线性显着影响电子节气门性能。通过计算机模拟,实验和分析计算分析这些影响的影响。开发了动态摩擦模型,以便充分捕获实验观察到的预定位移和分离效应的特征。电子节气门过程模型的线性部分也进行了分析和实验识别。提出了一种非线性控制策略,包括比例 - 积分 - 微分(PID)控制器和用于摩擦和跛行回家效应的反馈补偿器。根据阻尼最佳标准对PID控制器参数进行分析优化。通过计算机模拟和实验验证了所提出的控制策略。
关键词
汽车应用,控制,阻尼最佳,直流电机,电子节气门,摩擦补偿,跛行回家非线性,伺服驱动。
背景及意义
现代高端汽车包括100多个电驱动器[1]。 这些驱动器中的一组重要包括高性能伺服驱动器,其执行各种x-by-wire功能(例如,线控驱动和线控转向功能)。 本文涉及线控(或电子节气门)伺服驱动器的控制。
电子节气门是直流伺服驱动器,可提供节流板的精确定位。 它越来越多地用于汽车发动机,以提供基于发动机的车辆动力学控制系统(包括牵引力控制)的实施,并改善车辆驾驶性能,燃油经济性和排放[2]。 工程实践表明,电子节气门应满足以下要求。
1)对于任何工作点和任何参考阶跃变化,位置控制系统阶跃响应的稳定时间应小于100 ms。
2)稳态指向误差应小于0.1。
3)不允许阶跃响应的过冲; 这个要求对于大信号操作模式尤其重要,以避免在极限位置碰到机械挡块。
4)要求节气门位置信号和指令信号的低扰动水平,以避免过大的电位计和传动装置磨损,以及电机损耗。
5)需要控制系统相对于工艺参数变化的稳健性,这可能由生产偏差,外部条件(例如温度)的变化和老化引起。
6)需要简单的控制策略,以便可以在典型的低成本汽车微控制器系统上实现。
在[3]中已经证明,电子节气门可以通过比例 - 积分 - 微分(PID)控制器有效地控制大信号工作模式。 然而,它在小信号工作模式下的性能受到摩擦和跛行非线性的影响。 例如,对于典型的怠速控制应用,节气门位置变化小于0.5,并且系统永久地位于或接近高度非线性零速摩擦(静摩擦)区域。 为了满足快速准确的油门响应要求,需要补偿摩擦力的影响。 这可以通过改进电子节气门机械设计(降低摩擦水平)或通过应用摩擦补偿算法来完成。 由于前一种方法通常与高开发和生产成本相关,后一种方法的研究和应用可能是非常有益的。
尽管摩擦建模,分析和补偿领域已得到很好的研究[4],但它在电子节气门控制(ETC)中的应用相对较少。 大多数可用的ETC论文涉及线性过程模型的控制,包括跛行 - 非线性的补偿[5] - [9]。 通常,只有在使用低摩擦电子节气门时,这种方法才能满足上述要求。
有一些ETC论文确实考虑了摩擦补偿。在[10]中提出了一种基于静摩擦模型的前馈摩擦补偿方法。然而,这种方法不能有效地应用于具有强调的前移位移动摩擦效应的系统[11],[12],并且已经发现这项工作中使用的电子节气门属于这一类[13]。此外,[10]中的实验结果显示了具有相对大的稳态误差的慢指向响应。在[14]中也观察到电子节气门中的预定位移效应,并且在控制器设计过程中将其考虑在内。来自[15]的脉冲控制摩擦补偿方法在[14]中被修改,以避免对于跟踪系统的一般情况的命令信号的过度扰动。然而,所提出的实验结果表明不利的控制系统性能,其特征在于阶跃响应稳定时间约为300毫秒,稳态误差约为2。 [16],[17]提出了一种基于滑模控制的高性能ETC策略,该控制扩展了神经网络,补偿了过程的不确定性(包括摩擦和跛行回归“不确定性”)。然而,该方法的特征在于相对高的计算负担。
这项工作的主要目的是制定和实施符合所有上述要求的ETC战略。 作为控制策略开发的基础,进行线性过程行为,非线性摩擦和跛行回家效应的分析。 通过计算机模拟和实验分析这些影响。 模拟基于从实验系统识别中获得的过程模型[13]。 研究发现,面向综合控制的LuGre摩擦模型[18]无法准确捕捉实验观察到的电子节气门摩擦动力学。 为了提高建模精度,本文提出了一种实用的摩擦模型,可以看作是Dahl动摩擦模型[19]和广义Stribeck静态模型[4]的组合。
所提出的控制策略包括线性控制器和非线性摩擦和跛行回家补偿器。 线性控制器稳定了大信号工作模式的控制系统,而非线性补偿器改善了小信号工作模式的控制系统性能。 线性控制器包括PID反馈控制器和超前滞后前馈控制器。 选择PID节流控制器是因为它在汽车实践中被广泛使用和理解,并且很好地适合于相对简单的线性过程模型。 通过计算机模拟和广泛的实验测试来检查整个控制系统。 为了提高控制系统的鲁棒性,控制策略在[20],[21]中得到了扩展,具有自动调谐和自调整自适应策略。
进程模型
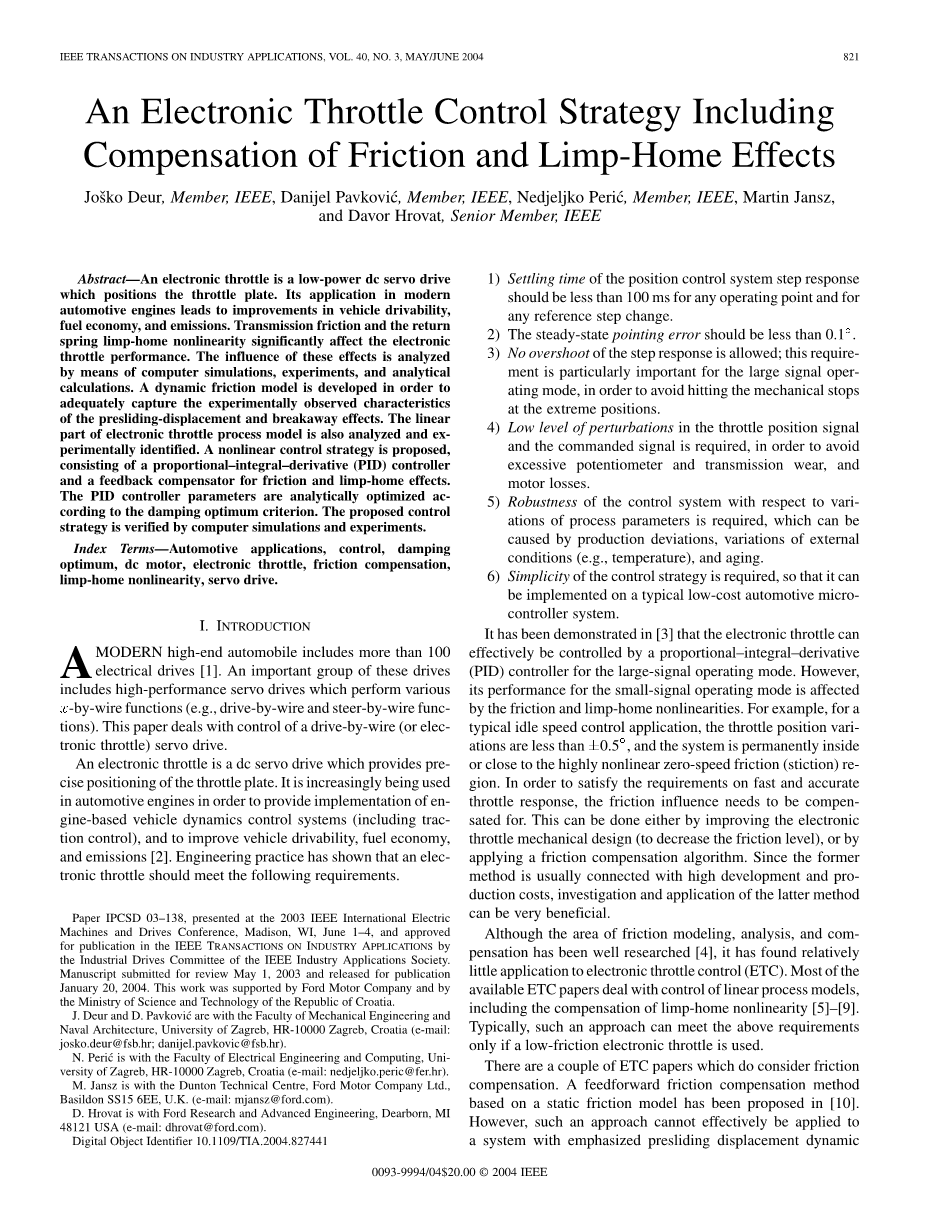
图1为电子节流阀的功能方案。电子节流阀是一个直流伺服驱动器,需要提供精确的定位节流阀板。它不包含内部电流控制循环。用分辨率为0.11ordm;的电位器测量节流阀位置。节流板的运动受到弹簧的约束。在电源故障的情况下,该弹簧使板返回其初始位置(所谓的跛行回位),从而允许驾驶员“跛行”车辆回家。
图1.电子节气门示意图
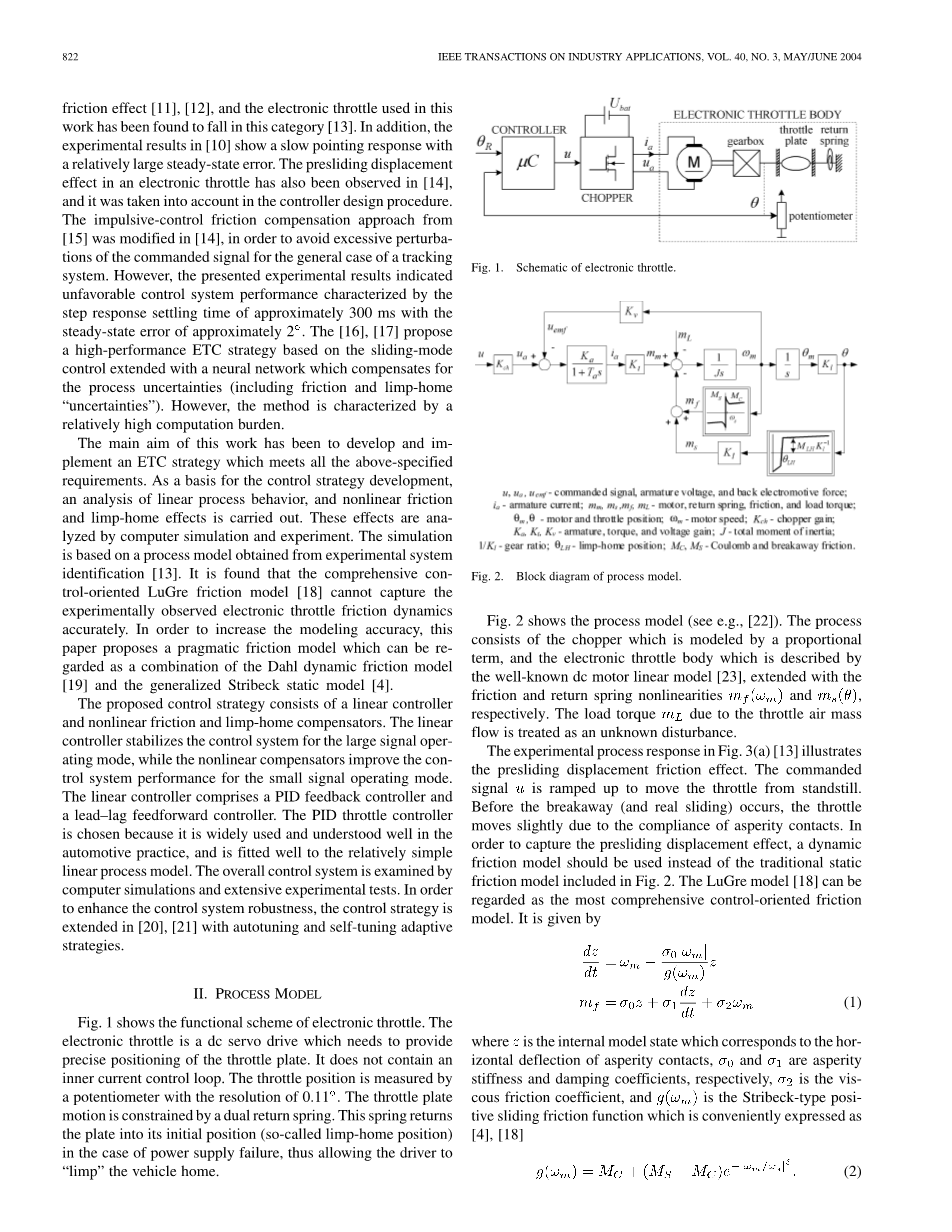
图2.过程模型框图
图2为流程模型(如[22])。该过程由比例项建模的斩波器和由著名的直流电机线性模型[23]描述的电子节流阀体组成,分别由摩擦非线性和回弹非线性扩展而成。将节流阀空气质量流量引起的负载转矩视为一种未知扰动。
图3(a)[13]为预压位移摩擦效应示意图。命令信号调高,使油门从静止状态移动。在分离(和真正的滑动)发生之前,由于符合苛刻的接触,节流阀轻微地移动。为了捕捉预压位移效应,应采用动摩擦模型代替图2所示的传统静摩擦模型。LuGre模型[18]可以被认为是最全面的面向控制的摩擦模型。如下所示:
与粗暴接触的严重程度等偏差相对应的内部模型状态为z,sigma;0和sigma;1分别为粗糙刚度系数和阻尼系数。sigma;2为可见摩擦系数, g(omega;m)为便于表示[4][18]的Stribeck型正滑动摩擦函数。
图3.预定位移摩擦效应图
如果忽略粘滞阻尼项sigma;1(dz/dt)和粘滞摩擦项sigma;2omega;m,如果滑动摩擦可以用库仑摩擦曲线 (g(omega;m)=Mc=Ms)表示, LuGre摩擦模型简化为Dahl摩擦模型[19]:
图3(a)所示的预压位移响应可以很好地用图3(b)所示的Dahl预压静态曲线表示。由于A/D转换引起测量量子化的假设,实验曲线存在噪声。它可以通过Dahl模型曲线精确插值,如图3(b)所示。注意,如果记录双向运动,图3(b)中的曲线将包括一个滞后回路。在[13]中给出了关于Dahl预压曲线及其识别的更多细节。
将图2中的过程模型转换为图4(a)所示的模型。转换后的模型结构与图4(b)所示的基于标准电流控制环的直流驱动[23]结构相似。图4(a)模型中电机电流ia*和转矩的虚拟值mm*对应于图4(b)“标准”模型实值ia和mm。电动势uemf的影响如图4(a)所示,通过一个假想的阻尼力矩md*,要么可以治疗[在图4(b)中]已知的负荷线性分量(扰动)扭矩mL,要么等效的过滤粘性摩擦扭矩。电枢滞后效应[图4(a)所示的Ta-effect效应]对应于内部电流控制回路的滞后效应[图4(b)所示的Tei-effect效应],其中两个时间常数(Ta和Tei)具有可比性的值(通常在1毫秒左右)。图2和图4(a)中的返回弹簧反馈路径ms(theta;)可以近似为继电器特性,并将[图4(b)]视为摩擦式位置相关扰动。
图4.(a)电压控制和(b)电流控制直流驱动器的过程模型框图
图5.线性过程模型框图
图4 (a)和(b)中过程模型之间观察到的相似性,摩擦之间的相似性和回位弹簧静态曲线意味着:1)摩擦分析和补偿方法具有广泛开发的“标准”伺服系统(见例子[4]),可以应用于电子节气门。2)这些方法也可用于分析和补偿跛行的非线性效应。
线性过程模型的分析与识别
A:分析
图2中过程模型的性部分如图5所示。反电动势(EMF)uemf作为等效阻尼系数的阻尼器
[比照图4 (a)]
图5中的线性过程模型可以在以下假设[3]的基础上进行简化:
1)与电动势阻尼相比,粘性摩擦阻尼可以忽略不计(sigma;2lt;lt;Kd)。
2)电枢滞后效应可以忽略不计(Talt;T,T为暂时中断时间)。
3)电动势阻尼太大,回弹柔度对过程动态行为的影响可以忽略不计。
根据[3],条件1)和条件2)满足特定电子节流阀体的条件(注意Taasymp;0.5ms[13])。条件3)满足跛行位置以上区域(theta;gt;theta;LH),但不适合当theta;lt;theta;LH时(图2[3],[28])。这些结果也适用于许多其他电子油门机构。
满足条件1)到3)的过程模型可以用积分滞后项来描述:
其中增益Kp和机电时间常数Tem可由下得到:
当条件3)不满足(theta;lt;theta;LH)时,用二阶项描述过程
和
B .识别
在[13]中给出了线性和非线性过程动力学的详细实验辨识。线性动力学辨识包括基于物理模型形式的多步辨识方法和基于连续时间和离散时间输入——输出模型形式的单步辨识方法。本文概述了连续时间积分滞后型模型形式(6)的辨识。图6(虚线)为节流阀转速∆U随所采集信号u阶跃变化的实验响应,对于在跛行回家之上的操作点
位置(theta;gt;theta;LH)。通过对测得的位置信号进行时间微分重构速度信号。根据模型(6),速度响应用一阶滞后传递函数来描述:
图6.线性过程模型的识别结果。
图7.线性控制系统的框图
过程增益Kp估计为:
其中omega;ss为响应稳态值(图6)。机电时间常数Tem可以用数值方法估计为一个值,该值可使用于测量速度响应与预测速度响应之差的最小二乘准则([13];图6)。然而,在[13]、[20]中提出了另一种更简单的估计方法,并将其作为电子节流阀自动调谐过程[20]的一部分加以应用。这个方法是基于此方程:
收益率
其中为Tfingt;gt;Tem响应稳定时间(图6)。
非线性过程动力学参数Mc,Ms,theta;LH和MLH(图2)的辨识是基于实验记录的非线性过程静态曲线u(theta;)和图3(a)[13]的分离实验。
线性控制器优化
该线性控制器由PID反馈控制器和超前滞后前馈控制器(FFC;图7))组成。针对不强调非线性摩擦和跛行效应的大信号工作模式(第五节),对其进行了优化。
A:PID控制器
PID控制器采用改进形式[24]、[25]给出,其中P、D项放在控制系统反馈路径中。改进后的PID控制器(连同前馈控制器)能够在参考theta;R和干扰两方面提供最优的闭环系统行为(例如,摩擦或负载扭矩),对于参考theta;R[24],[25]没有较大的阶跃响应超调。根据阻尼最优值[25]-[27]确定PID控制器参数。这是一种设计任意阶线性连续时间系统的简单而有力的杆位式解析方法。该方法最重要的特点是能够对降阶控制器的参数进行分析优化。该方法是基于闭环特征多项式给出的形式
其中Te为等效时间常数,D2,D3,hellip;hellip;Dn为特征比。在最优情况D2=D3=hellip;hellip;=Dn=0.5[25] -[27]下,任何n阶闭环系统都具有准非周期阶跃响应,超调量近似为6%,上升时间近似为1.8Te。在降阶控制器的情况下,只有优势特性比D2,D3,hellip;hellip;Dr(rlt;n)被设置为0.5的最优值。为了实现准连续设计,采样器零阶保持器(ZOH)以及控制器D项中使用的时间微分器(图7)均近似为一阶滞后项,滞后项的时间常数为T/2[25]。这些寄生延迟,连同电机电枢延迟,可以近似地用具有时间常数的等效一阶单元增益过程滞后项来描述
将这个寄生过程项集中到过程转移函数(6)和(9)中生成(注意Tsum;lt;lt;Tem)[3]
资料编号:[4249]



