水下机器人运动姿态控制系统的建模及仿真分析毕业论文
2020-02-19 09:03:52
摘 要
在陆地资源面临枯竭的情况下,许多国家都把目光转向海洋,不断研究开发出新的技术来更好的利用海洋资源,水下机器人作为探索、开发海洋资源最有效的手段之一,也就得到了很好的促进与发展,而稳定可靠的运动姿态控制系统是完成水下作业及任务的必要保证。目前有关水下机器人运动姿态的智能控制多是PID控制与其它智能控制相结合,如神经网络控制、自适应控制、滑模控制、模糊控制等,扬长避短,使得其运动姿态的控制更加稳定迅速。
基于作者本身能力,文章以遥控式水下机器人ROV为研究对象,在对各系统部位的模块化设计同时,提出了有关其运动姿态控制的解决方案(模糊PID控制算法),并针对深度的运动控制进行闭环仿真研究分析。仿真分析结果证明模糊PID控制器在水下机器人ROV运动姿态控制上的有效性,为实际水下机器人运动姿态的控制提供了更多的选择性和理论依据,进而为模糊PID控制的实际应用推广提供良好的策略指导。
本文的主要研究内容如下:
1.水下机器人ROV运动姿态系统设计。本文首先通过国内外对ROV研究的分析,提出针对BlueROV的运动控制系统的设计方案,较为详细地介绍了其各部件的状态参数及工作原理。同时,在此基础上,针对实际工作情况简化建立本系统的空间运动方程。通过对推力和阻力的近似化处理,进行了水动力性能分析。
2.水下机器人ROV运姿态控制器设计分析。通过对常规PID控制器工作原理分析,针对其不足之处设计了模糊PID控制器,借助模糊集合论、模糊语言变量及模糊逻辑推理等理论方法展开具体的研究。通过建立水下机器人数学模型,针对运动姿态中的深度控制进行建模分析;通过应用模糊PID控制算法,在 MATLAB/Simulink 软件中建立自动定深控制模型,并进行动态仿真。仿真实验结果证明了模糊PID控制器在水下机器人ROV运动姿态控制上的有效性。
关键词:ROV;运动姿态;PID控制;模糊PID控制
Abstract
Under the condition of the land resources are exhausted, many countries are turning to the ocean, continuous research and development the new technology to make better use of Marine resources, underwater robots as exploration and development of Marine resources, one of the most effective means of also got very good promotion and development, stable and reliable and the movement of the attitude control system is the necessary guarantee underwater operation and task. At present, the intelligent control of the underwater robot's movement attitude is mostly the combination of PID control and other intelligent control, such as neural network control, adaptive control, sliding mode control, fuzzy control, etc.
Based on the author's own ability, this paper takes the remote-controlled underwater robot ROV as the research object, proposes the solution of its motion attitude control (fuzzy PID control algorithm) while modularizing the design of various system parts, and conducts closed-loop simulation research and analysis for the motion control of depth. The simulation results prove the effectiveness of the fuzzy PID controller on the ROV movement attitude control, which provides more selectivity and theoretical basis for the actual movement attitude control of the underwater robot, and thus provides good strategic guidance for the practical application of fuzzy PID control.
The main research contents of this paper are as follows:
1. ROV motion attitude system design. In this paper, the design scheme of the motion control system for BlueROV is proposed based on the analysis of ROV studies at home and abroad, and the state parameters and working principles of its components are introduced in detail. At the same time, the space motion equation of the system is established according to the actual working situation. Through the approximate treatment of thrust and resistance, the hydrodynamic performance is analyzed.
2. Design and analysis of ROV attitude controller. By analyzing the working principle of conventional PID controller, a fuzzy PID controller is designed for its shortcomings. By establishing the mathematical model of underwater robot, the depth control in the movement attitude is modeled and analyzed. By applying fuzzy PID control algorithm, automatic depth control model was established in MATLAB/Simulink software, and dynamic simulation was carried out. The simulation results prove the effectiveness of the fuzzy PID controller in the ROV attitude control.
Key Words: ROV; underwater robot's movement; PID controller ; fuzzy PID controller
目录
摘要 I
Abstract II
目录 III
第1章 绪论 1
1.1引言 1
1.2水下机器人分类 1
1.3国内外研究发展状况和趋势 2
1.3.1国外研究现状 2
1.3.2国内研究现状 2
1.4 水下机器人的主要研究方向 3
1.5现阶段控制方法综述 3
1.6本文研究的主要内容、目标、方法 5
1.7本文的组织结构 5
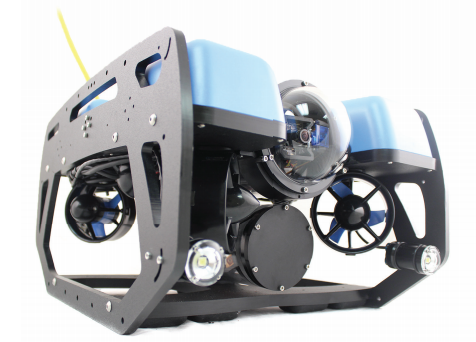
第2章 水下机器人ROV运动控制方案 6
2.1引言 6
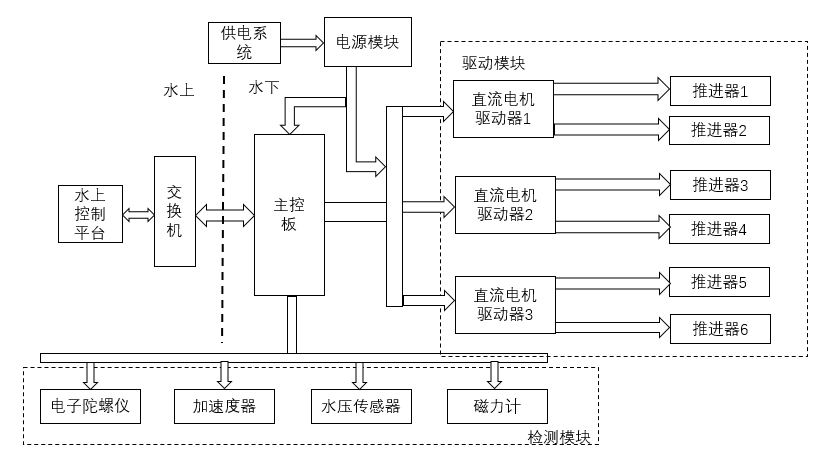
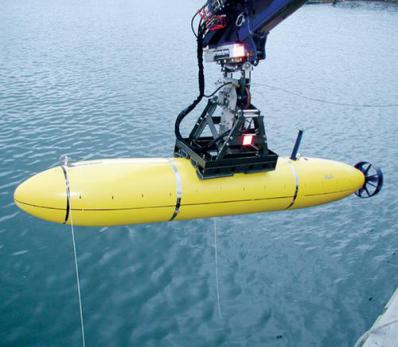
2.1.1结构功能概述 6
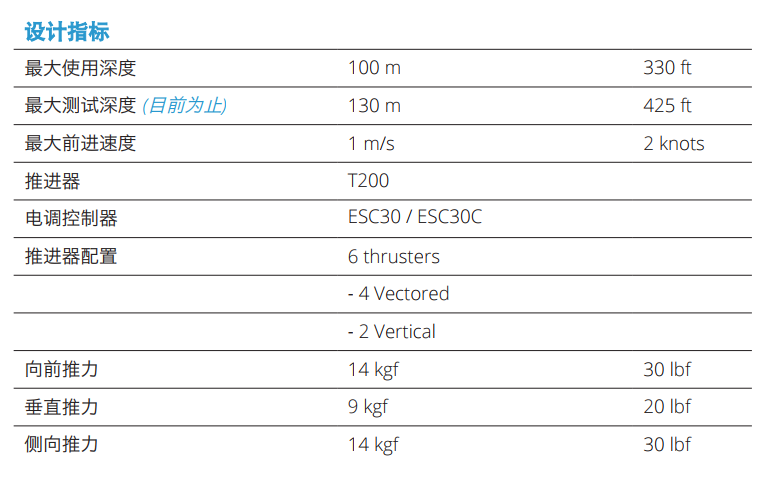
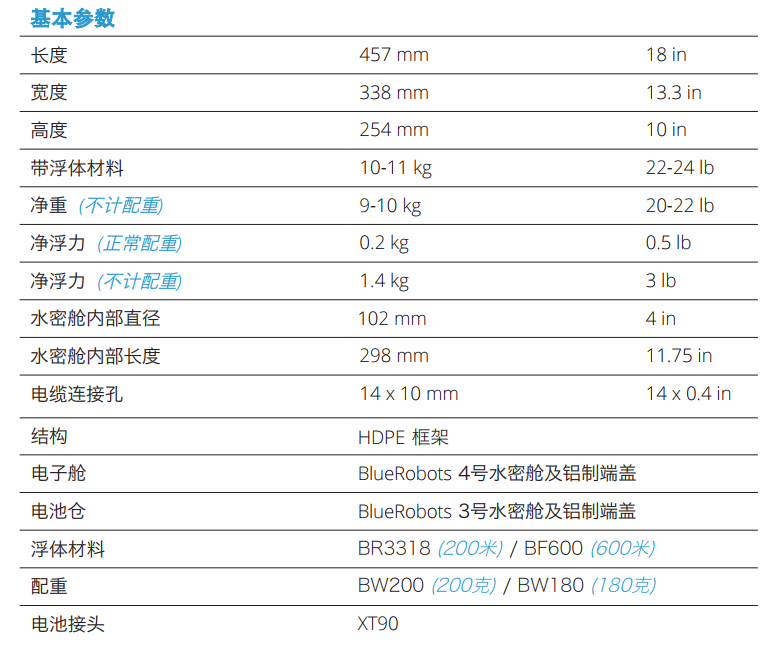
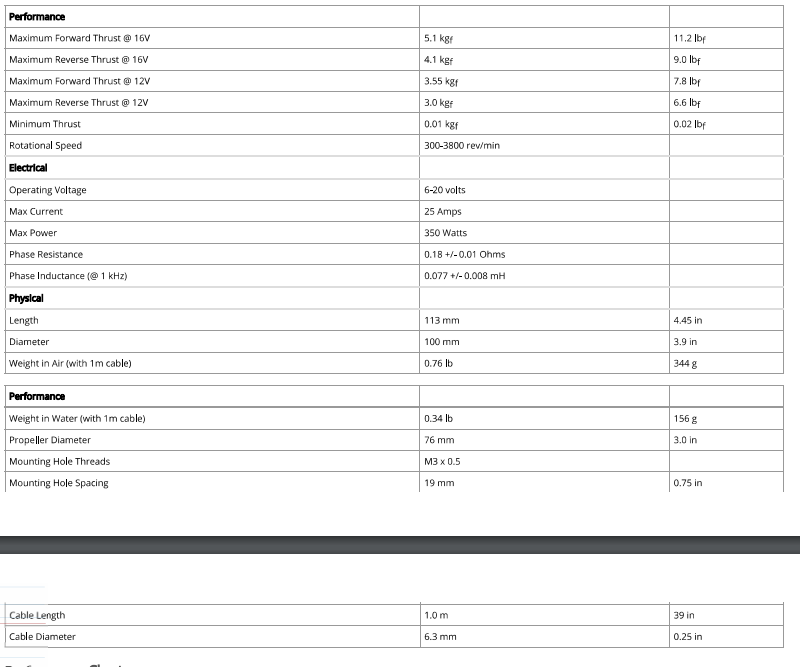
2.1.2主要技术参数 6
2.2运动控制设计方案 8
2.3 推力器布置 10
2.4动力学分析 10
2.4.1坐标系建立与转换 10
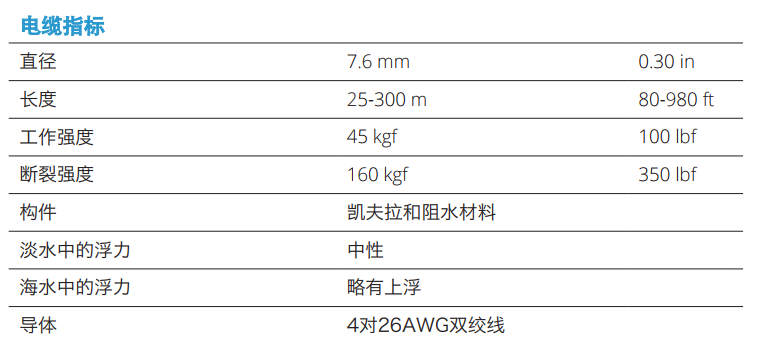
2.4.2脐带缆运动方程 12
2.4.3 BlueROV主体空间运动方程 13
2.4.4力学分析 13
第3章 水下机器人ROV的PID控制 15
3.1引言 15
3.2常规PID控制 15
3.2.1PID控制原理 15
3.2.2数字PID控制算法 16
3.3 PID参数整定方法 17
3.3.1实验经验法 17
3.3.2凑试法 18
第4章 水下机器人ROV的模糊PID控制 19
4.1模糊控制 19
4.1.1模糊控制原理 19
4.1.2模糊控制器结构 19
4.2模糊PID控制 20
4.2.1模糊PID控制器设计 20
4.2.2模糊PID控制算法实现 21
4.3模糊PID控制仿真 24
第5章 总结与展望 27
5.1总结 27
5.2展望 27
参考文献 28
致谢 29
第1章 绪论
1.1引言
20世纪以来,人类社会各个行业都得到了快速的发展,这自然导致自然资源的快速衰竭,尤其是在陆地资源越来越少时,人类就需要探索新的资源领域:海洋资源。海洋蕴藏着丰富的金属矿物、海底油气、可再生能源、各类生物等资源,将是下一个世纪,也是未来人类赖以生存的资源库。而中国的海岸线大概有18000km,海域面积有3000000左右。在如此宽阔的海域里蕴藏着非常非常丰富的资源。作为探索内空间的最重要手段之一的有缆遥控水下机器人ROV ( remotely operated vehicle ),对于海下能源探索开发、水下生物监测、近海岸军事检查等各个方面都有着重要的作用,同时因为其结构小巧、开发成本相对较低、动力性能良好的优点得到各个国家的高度重视,在ROV领域上同台竞技,争相抢夺科研的制高点。


图1.1人工巡检 图1.2缆控式无人自主水下机器巡检
1.2水下机器人分类
水下机器人通常由运动控制系统、检测反馈系统、信息通讯、动力系统组成,能够代替人在水下完成作业,或者是预期目标。当今水下机器人正在朝着小型化、廉价化、鲁棒化和群体化方向发展。水下机器人运动控制方法可以分为以下几类如图1.3所示[1]:
图1.3水下机器人分类
载人水下机器人因为需要维持下潜人员基本生存需求,推广应用起来面临巨大的成本,而无人水下航行器研发成本相对较低,相应得也比较灵活。AUV能够根据操作人员下达的指令,通过传感器检测水下实际环境,全自主编程智能控制、自动调节,进而完成我们预期目标。水下滑翔机最大的特点就是内部动力输出来源于主动调节机身所带来的升沉滑翔效果。因为动力来源需要不间断的重复升沉运动,故而在一些精细观测上Glider并不适用。有缆遥控水下航行器特点是具有脐带缆,操作员通过脐带缆发送远程姿态控制信号,目前ROV具有小型化和大众化的发展趋势[2]。
1.3国内外研究发展状况和趋势
1.3.1国外研究现状
 水下航行器,尤其是对于ROV,因为其研发成本相对较低,不管是公司还是国家科研单位都着手开发。国外在20世纪60年代就开发出由于探索海洋的ROV:CURV-1-3。之后海上石油工业的蓬勃发展更加带动了水下机器人的开发利用。上世纪80年代末,日本的海沟号潜水器创造了10911米的潜水记录。近些年来,因为各个产业,特别是材料、导航定位、通讯、自动控制技术的快速发展,水下机器人也得到了很好的发展。比较有代表性的如BPAUV、Bluefin系列AUV......,这些水下航行器都具有动力强劲,控制性能一流,定位导航及通信性能出色的特点。
水下航行器,尤其是对于ROV,因为其研发成本相对较低,不管是公司还是国家科研单位都着手开发。国外在20世纪60年代就开发出由于探索海洋的ROV:CURV-1-3。之后海上石油工业的蓬勃发展更加带动了水下机器人的开发利用。上世纪80年代末,日本的海沟号潜水器创造了10911米的潜水记录。近些年来,因为各个产业,特别是材料、导航定位、通讯、自动控制技术的快速发展,水下机器人也得到了很好的发展。比较有代表性的如BPAUV、Bluefin系列AUV......,这些水下航行器都具有动力强劲,控制性能一流,定位导航及通信性能出色的特点。
图1.4 Bluefin-21 图1.5日本“海沟”号
1.3.2国内研究现状
国内相关研究起步较晚,但也取得了骄人的成绩。如曾下潜5080m深度的“潜龙一号”,下潜深度达到6329m的“海翼”号水下机器人,这些都显示了中国水下机器人的快速发展水平。2017年,用于中科院科考而研制的ROV在深圳装机,该ROV目标下潜深度为 7000m,同年10 月份的海上测试已完成了下潜深度 6000m 的挑战。当然,目前我国水下机器人研究也面临着一些需要解决的问题,如市场批量化生产进程缓慢,一般都作为商用和科研,民用普及成本较高。



图1.7潜龙一号
图1。6 海翼号
图1.8 海龙号
1.4 水下机器人的主要研究方向
导航通信与智能控制是水下机器人的技术核心,是水下机器人具有优越性能的基础,故而,国内外很多学者都在水下机器人导航与控制方面进行大量研究。目前的水下航行器都大量应用惯性导航技术,虽然惯性导航有着良好的独立性、抗干扰性和隐蔽性的优点,但是因为其精度有限,故而在水下机器人上的直接应用受到较大的限制。但是目前已经可以利用计算机及控制理论(冗余技术)来提高惯性导航系统精度。例如,惯性导航系统精度的提高可以通过融合多惯性传感器数据实现,进而扩大其利用的领域[3]。
水下机器人要能在非常复杂的海洋等水下环境中稳定安全地完成预期目标任务,这就对其运动姿态的控制技术提出了更高的要求。水下机器人的智能姿态控制技术涉及诸多前沿领域,如传感器状态检测分析技术、自然环境下被控对象建模及其分析技术、自动路径规划和避障的技术、故障在线诊断及自我参数调节技术等。在水下机器人运动姿态智能控制技术的设计与开发中,需要考虑的主要问题有:水下机器人外壳载体结构设计、推进器选型及其位置姿态调节、传感器信息检测与分析、运动模型的仿真研究分析等,控制的变量有位置深度、航向角、航行速度,其中自动定位导航、运动姿态控制和自动路径规划时研究的重中之重。
1.5现阶段控制方法综述
ROV运动控制面临的的主要问题是海洋环境的复杂多变,进而使得水动力建模具有不确定性、复杂性,导致的问题如非线性的阻尼作用、外部环境干扰等。当前提出的控制方法也种类繁多,主流有经典和广泛使用的PID控制、鲁棒控制、预测控制、模糊控制、神经网络控制、滑模控制、自适应控制、混合控制等[22]。
(1)鲁棒控制:鲁棒控制是在控制系统参数摄动情况下,保持系统某些性能的控制。鲁棒控制器是在闭环系统中的固定控制器,主要是针对其鲁棒性问题而设计的。其目的主要是为了解决鲁棒稳定性问题,以及优化鲁棒控制性能。其优点是能够能保证系统能够在环境变化时,动力和水动力模型出现偏差时,仍然可以稳、准、快地响应。鲁棒控制器不需要非常精准的水动力模型,但是对不确定性的边界、系统噪音、外部干扰源信号特征要清楚了解。而且鲁棒控制器的综合过程比较耗费时间,一般是通过离线计算完成的。另外,鲁棒控制器控制的综合结果往往维度较高,无法保证结果是全局最优,需要进一步的分析再综合[2]。
(2)自适应控制:自适应控制(Adaptive Control)就是指机器能像动物一样对外界环境的变化能够自我调节,进而适应新的环境。也就是说自适应控制器能自我修正控制变量参数来适应模型偏差变化或者适应扰动的变化。自适应控制系统一般包括被控对象、自适应律、控制律、状态监测器;控制理论基础有超稳定性、李雅普诺夫、随机控制和参数估计等;其原理就是在系统闭环运行条件下对其控制性能进行评价,并且根据评价对系统参数进行自我调整 [1]。自适应控制理论优点就是对未知或者不确定的参数不需要进行边界假设,在某些具体应用中具有较高的鲁棒性。但是,自适应控制参数不能变化太快,否则,其控制参数就不能迅速收敛。
(3)模糊控制:模糊控制是由模糊集合论 、模糊逻辑推理 、模糊规则组成的控制器,用来模拟人的推理和决策的过程,其具体研究的阐述在第四章。许多工程实践中的案例表明,模糊控制处理模型高度复杂化和非线性化的系统比较好用,因为模糊控制也是近年来逐渐发展,故而模糊控制的稳定性分析、全局最优控制的数学分析方法有待进一步完善成熟。
(4)神经网络控制:神经网络控制是通过利用实际工程技术的方法来模拟神经网络,从而具有学习能力的智能控制方法,目前为止,主要学习算法有Hebb学习规则、DeIta(δ)学习规则、概率式学习规则、竞争式学习规则。神经网络主要特点是:能够以任意精度逼近任意非线性函数;对于高度非线性化的模型具有自适应和学习能力;信息综合能力非常强等。其控制方法有:神经网络系统辨识、评价和学习控制、神经网络非线性控制、神经网络自适应控制等[13]。
(5)滑模控制:滑模控制(Sliding Mode Control)是为了克服模型不确定性和非线性而提出的控制方法。其思路是在水动力模型和系统输入模型不确定的情况下,利用跟踪误差构建一个切换超平面,切换超平面一定经过原点,构建使得平面归零的控制输出,以保证控制跟踪误差为零的目标达到。该方法的优点是,对外来的干扰不敏感,鲁棒性很强,进而能够快速响应。但同时滑模控制方法也相对复杂,在滑动面上存在抖动问题[2]。
(6)预测控制:预测控制就是基于最优化原理,通过计算机计算分析对系统模型做出可能性分析,控制过程大体是在计算机采样控制瞬间,对当前状态进行求解最优控制,并且是求解开环系统的闭环最优控制算法。由其原理可知,预测控制需要知道系统的初始状态和过程的具体信息,以此来预测模型;预测控制需要通过重复的在线运行操作来计算,针对该时刻进行局部最优控制,即滚动优化;与其它智能控制一样,预测控制也需要反馈矫正环节,从而使得预测控制具有较强的抗干扰能力。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: