感应电动机带速重投研究外文翻译资料
2022-09-05 16:19:14
英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
摘要:为了最小化异步电动机加速过程中的不稳定运行,三相电压型逆变器必须从一个转速增加输出频率。本文提出了一种新的异步电动机重新启动方法,这种方法可以使建立磁通瞬时阶段的速度变化最小化。这种方法是在逆变器启动感应电动机时利用转子磁链观测器和反电动势信号来估计转速,且已被实验证实。
关键词:异步电动机、带速重投、速度传感器、反电动势
一.引言
通常情况下,在逆变器运行且频率从0HZ开始增加之前,感应电机处于静止状态。然而,在某些情况下,电动机处于一种旋转状态,例如,在一个瞬时功率中断或负载条件下重新起动电动机。在这种情况下,如果变频器的输出频率从0上升,由于逆变器输出与电机之间的频率差异,电机将减速并伴随很大的浪涌电流,有时候,过电流或过电压导致逆变器跳闸。为了避免这些跳闸,磁制动可用于停止电机,之后又变频器将电机重新启动。但这种方法的效率很低。
为了最大限度地降低这种减速,逆变器的输出频率必须随电动机的转速增加而增加。人们提出了一些方法,在没有速度传感器的情况下,通过注入电流估计,来估计转速。但是如果电机仍在反电动势,这些方法还有一定的问题。
本文提出了一种新的利用反电动势信号估算转速的方法,这种方法,最大限度地减少了在逆变器启动时的瞬时速度变化。
二.重投算法
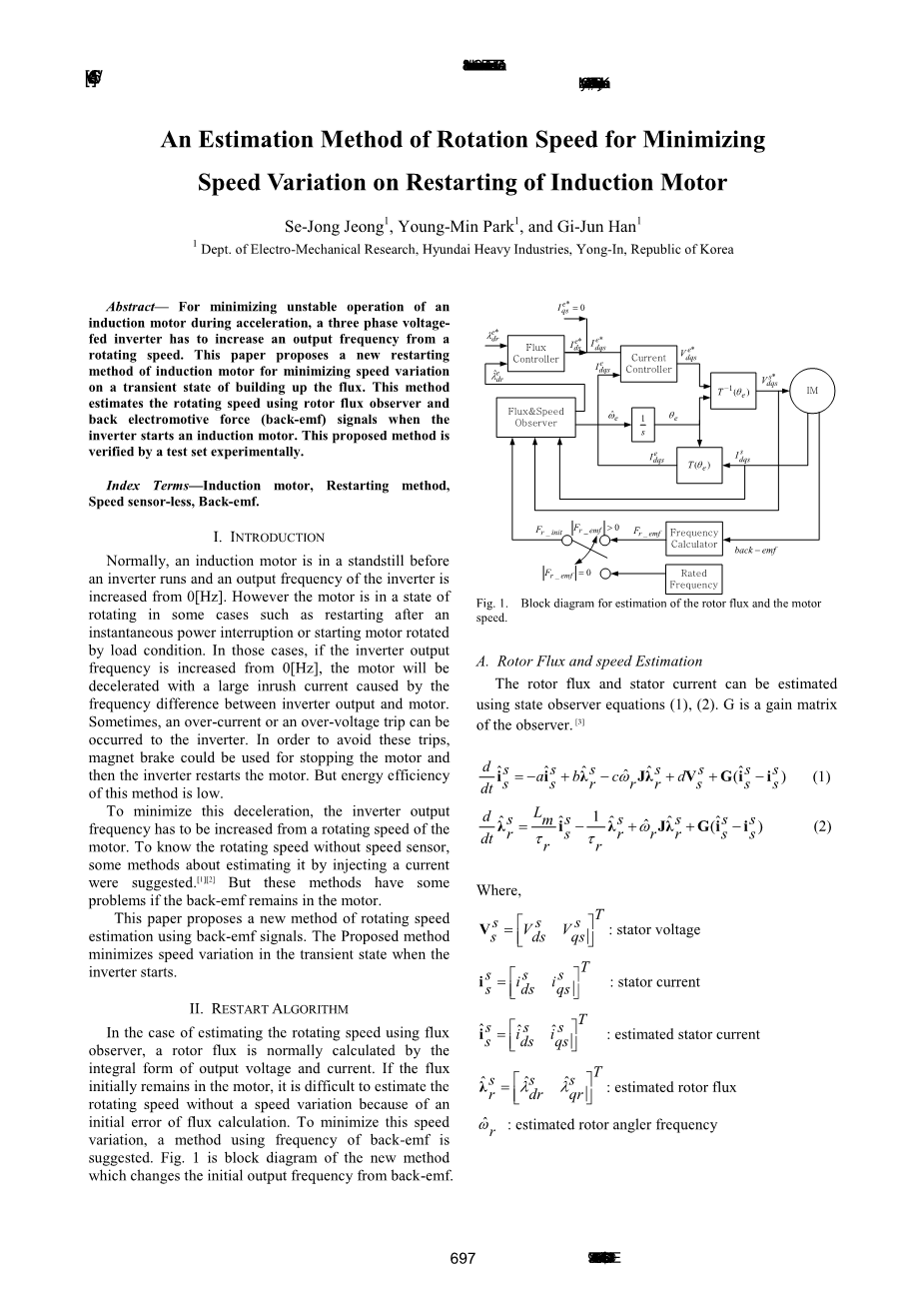
在用磁通观测器估计转速的情况下,转子磁链通常是由输出电压和电流的积分形式计算出来的。如果电机仍有磁通,转速不变时很难估计转速,因为磁通计算存在初始误差。为了最大限度地减少这种速度的变化,提出了一种使用频率的反电动势方法。图1是这种方法的框图,它从反电动势改变了初始输出频率。
图1 转子磁通和电机转速的块图
- 转子磁通和转速估计
转子磁通和定子电流可以用状态观测方程(1),(2)估计,G是一个增益矩阵。
定子电压
定子电流
估算定子电流
估算转子磁通
:估算转子角频率
转速是通过方程(3)求得的,k为正数。
为了获得电机的速度,一定程度上使用了积分方案。
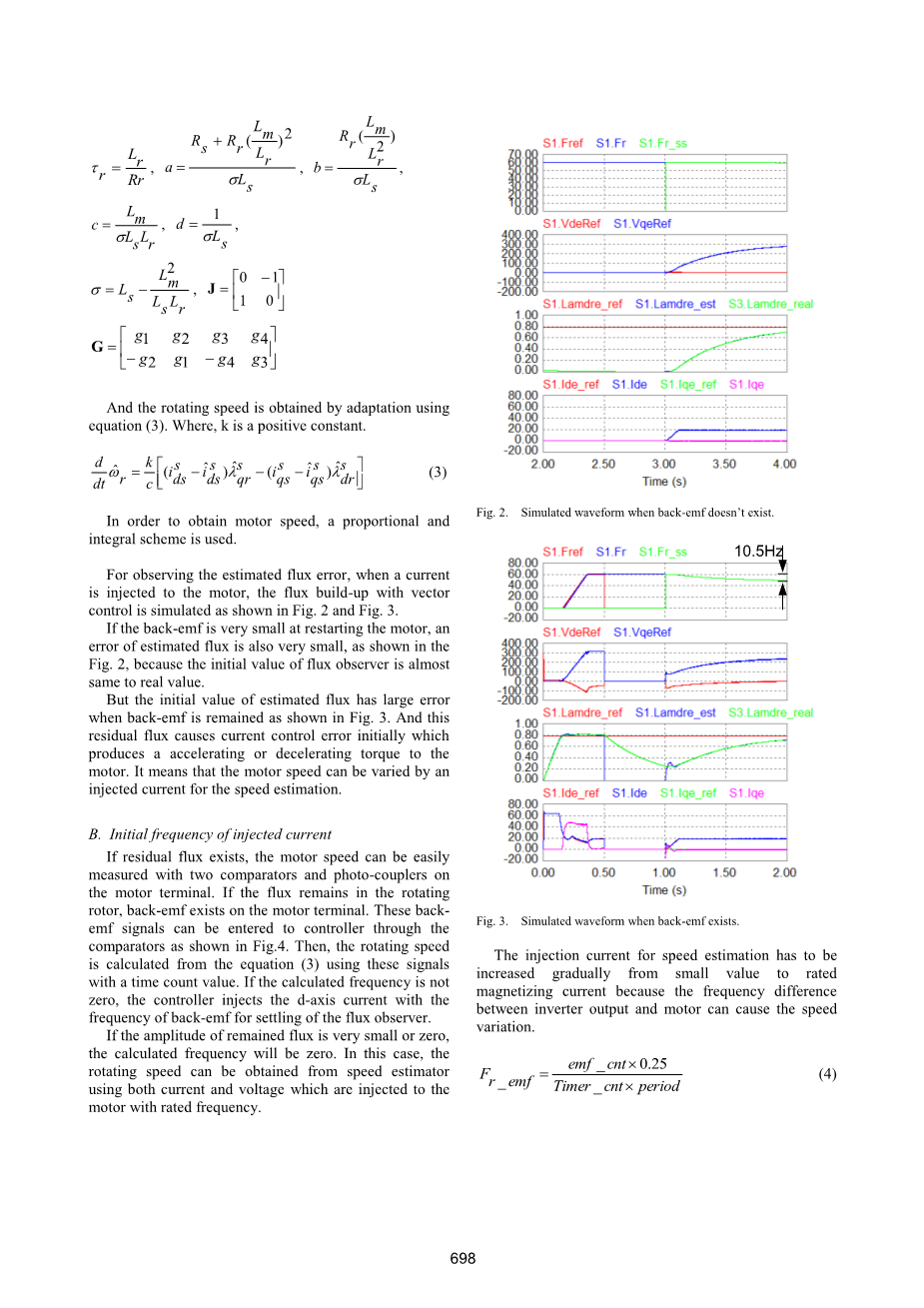
为了研究所估算估计的磁通误差,当电流被注入到电机时,通过矢量控制模拟建立磁通如图2和图3所示。
如果反电动势是非常小的,在启动电机时,估算通量的误差也很小,如图2所示,因为磁通观测器的初始值是几乎与实际值相同。
但当有反电动势存留时,估计流量的初始值有较大误差,如图3所示。剩余磁通会造成起始电流控制误差并使电机转矩增大或减小。这意味着电机的速度可以由为了估算转速而注入的电流改变。
B、注入电流初始频率
如果剩余磁通存在,电机转速可以很容易的通过两个比较器和光电耦合器在电机端子测量。如果在旋转的转子上留有磁通,反电动势存在于电机端子,这些反电势信号可以通过比较器输入到控制器如图4所示。然后,转速计算通过方程(3)使用这些信号的时间计数值得到。如果计算出的频率不为零,控制器将以反电动势频率注入d轴电流来设定磁通观察。
如果保持磁通的数量非常小或为零,计算出的频率将是零。在这种情况下,转速可以由额定频率注入的电流和电压得到
图2 反电动势不存在时的模拟波形
图3 反电动势存在时的模拟波形
由于变频器输出与电机之间的频率差,使得转速估计的注入电流从很小的值逐渐增加到额定的励磁电流值。
图4 反电动势频率测量
图5是电机启动时速度估计的计算流程图。在第一序列中计算反电动势频率,然后初始频率是由计算出的频率值决定的。在第二序列中,q轴电流固定为零,d轴电流逐渐增加到设定值,小于空载电流。在这个序列中,考虑到磁通观测器的响应时间,需要给定一些时间。在第三个序列中,d轴电流增加到空载电流,并且可以观测到输出频率发生变化。在第四个序列中,磁通被控制到额定值,电机被控制到在第三个序列最后估计的速度。当磁通超过设定值时,速度估计序列就结束了。图5中的磁通累积序列可以通过设置值来降低。但是,在下一章中提出的控制模式中时间会更长。
C、控制方式改变
如果控制模式是传感器的矢量控制,控制器完成此速度估计过程中,估计通量值大于设定值。在v/f控制的情况下,逆变器的输出电压必须随电流控制模式,电机的速度估计完成时电压而变化。如果输出电流的时间变化是零,稳态电压的速度估计和v/f控制的方程分别是(5),(6)和(7),(8)。为防止过电流,有必要逐渐降低参考电压的差值。
在改变控制模式的序列中,输出频率固定为估计频率,dv/dt限制器用于将参考电压逐渐变为V/f控制电压。模式变化的框图如图6所示。
图5 重新启动时的速度估计流程图
图6 控制方式改变的框图
:额定角频率
:额定相电压
- 仿真结果
通过计算机仿真验证了本文提出的速度估计算法。图7显示的模拟与仿真系统的参数如表1中所示。
表1 仿真系统参数
重新启动与传感器控制的仿真结果如图8和图9。
图8显示了残余磁通的结果。瞬时断电后重新启动(IPF)是通过当电机运行在60Hz时关闭运行命令0.5秒来模拟的。变频器的输出频率固定为通过反电动势计算得到的频率,d轴磁通估计电流增加了空载电流的一半,然后控制器开始速度估计和磁通积聚。最后,速度搜索完成,控制器使电机
图7 仿真框图
加速。
图9显示的是当剩余磁通不存在时的结果。逆变器的输出频率固定为额定频率,之后的程序与图5相同。
在图10和图11中显示了v/f重投控制。图10(a)和图11(a)显示了完成磁通集聚后改变模式的结果。图10(b)和图11(b)显示了完成速度估算后改变模式的结果。这些仿真结果表明,改变控制模式的总时间,可以通过磁通积累序列减少。
图8 剩余磁通存在时重新启动仿真结果
图9 无剩余磁通时重新启动仿真结果
图10 剩余磁通存在时重新启动的仿真结果(a)包含磁通积累序列顺序是涉及(b)省略磁通累积序列
图11 剩余磁通不存在时重新启动的仿真结果(a)包含磁通积累序列顺序是涉及(b)省略磁通累积序列
四.实验结果
所提出方案经22kw-380v-45arms感应电机测试实验,频率下降速率约为每秒1Hz单向转动状态。
v/f控制重新启动的实验结果显示在图13,图14和图15。
图13显示了在电机端子上测量的反电动势时,重新启动的结果。当电机运行在60Hz,关闭所有开关1.3秒后变频器启动。变频器的输出频率固定为通过反电动势计算重新启动时的频率值58Hz,如图5程序,控制器加速电机从57.7Hz后速度估计和控制方式的改变是成功的。
图14显示了当剩余磁通很小时重新启动的结果。电机在重投时的频率是35Hz,控制器从34Hz开始加速电机。图15显示了该试验电机反向旋转的结果。因此,在实验开始时,不存在剩余磁通。电机在重投时的频率是31.5Hz,控制器从30.5Hz开始加速电机。
图12 重新启动的实验装置
图13 剩余磁通存在时v/f重投实验结果
图14 剩余磁通很小时v/f重投实验结果
图15 剩余磁通为零时v/f重投实验结果
图16 传感器控制重投实验结果(a)剩余磁通量存在(b)剩余磁通量很小
传感器重投的实验结果示于图16。控制器成功的在速度估计和控制模式的变化完成后加速电机,与v/f控制相似,无论剩余磁通的多少。
- 结论
本文提出了一种新的感应电机转速估计方法,使用自适应速度观测器和反电动势信号,还描述了控制方式转变为v/f控制的方法。实验验证了感应电机可以以一个小的速度变化启动并且与残余磁通无关。
引用
[1] K.Fujinami,K.Takahashi, K.Kondo,Y.Sato,“A Restarting
Method of an Induction Motor Speed-sensorless Vector Control System for a Small-Sized Wind Turbine Power Generator System”, ICEMS 2009, pp.1-5,Nov,2009.
[2]Sun-jaKim,Jeong-haKim,“A Restarting Method by v/f-controlled Inverter for Induction Motor without a Speed Sensor”,Power Electronics Annual Conference,pp.1-3,Jul/Aug, 2007.
[3] H.Kubota, K.Matsuse and T.Nakano, “DSP-based speed adaptive flux observer of induction motor”, IEEE Trans. on IA, Vol.29, no.2, pp.344-348, Mar/Apr,1993.
[4] H.Kubota, I.Sato, Y.Tamura, K.Matsuse,H.Ohta,and Y.Hori, 'Regenerating-modelow-speed
operation of sensorless induction motor drive with adaptive observer',
IEEE Transactions on Industry Applications, vol.38, no.4,pp.1081–1086, Jul.-Aug.,2002.
[5] K.Suzuki and S.Kondo, 'Position sensorless drive of IPM motor within middle/high speed range considering power interruption, ' in Proc.IEE Japan IAS Conf.,4-156,2005,pp.251–252.
[6] Z.Lin, Y.Ito, and M.Matsui, 'A control scheme for rotating speed picking up and constant power acceleration of a flywheel energy storage system,' in Proc.IEE Japan
IAS Conf.,4-014,2004,p.21.
[7] A.Toba, M.Sato, S.Inatama, and K.Fujita,'Free-runstartup techniques for sensorless-drive systems of permanent magnet machine with phase current or DC-bus current detection, ' IEEJ Trans.Ind.Appl.,vol.126,
no.3,pp.315–321,2006.
[8] H.Iura, K.Ide, T.Hanamoto, and Z. Chen, 'An Estimation Method of Rotational Direction and Speed for Free-Running AC Machines Without Speed and Voltage Sensor,' IEEE Transactions on Industry Applications, vol. 47, no.1, pp.153–160, Jan.-Feb., 2011.
[9] A.David, E.Lajoie-Mlrzcnc and C. Sol, 'Soft Restart of an Adjustable Speed Drive after a Short Disconnection without any Mechanical Speed Sensor, ' IEE Sixth Int.Conf. on Elec.Machines and Drives,Oxford, United-Kingdom,Sept.8-10,1993
[10]H.Mosskull,'Some issues on stabilization of an induction
machine drive', in the 43rd IEEE Conf. on Decision and Control,vol.4, pp.4441-4446,2004.
[11] N.Mutoh, A.Ueda, K.Sakai,
M. Hattori and K.Nandoh, 'Stabilizing control method for suppressing oscillations of induction motors driven by PWM inverters', IEEE
Transactions on
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[147265],资料为PDF文档或Word文档,PDF文档可免费转换为Word



