交流可控硅整流控制器的高起动转矩外文翻译资料
2022-09-05 16:18:03
英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
交流可控硅整流控制器的高起动转矩
摘要:一种交流晶闸管的控制策略,这种技术的主要特点是通过很经济的设计获得很高起动转矩。这就使交流晶闸管控制器有了更广泛的应用,这在以前是做不到的。这种方法采用将交流晶闸管作为一个离散变频逆变器,使频率增加到标准频率(本文中为60Hz)。而离散频率为标准频率的子倍数,由标准频率半周期产生。电压序列预定为每个子多的线频率。为了获得正转矩,系统是不平衡的。所提出的控制方法是对系统建立模拟并仿真(使用EMTP软件)。在与传统的交流晶闸管起动器进行了比较之后,结果显示新式晶闸管控制器可以降低起动电流,增加起动转矩和低转速下运行的可靠性。
关键词:交流控制器,晶闸管,EMTP,逆变器,感应电动机,电机驱动,软启动,转矩脉动,起动转矩,电压序列
- 简介
在过去的几十年里,电力电子驱动器的产品已经丰富多样,这些驱动器是DTO、功率MOSFET、IGBT、MCT的。即使有了这些新的设备,最简单的晶闸管仍然是一个实用、简单、经济、有许多用处的设备。比如整煤机、熔炉控制、在输电和配电系统中电子开关功率因数校正和感应电机软启动中的应用。
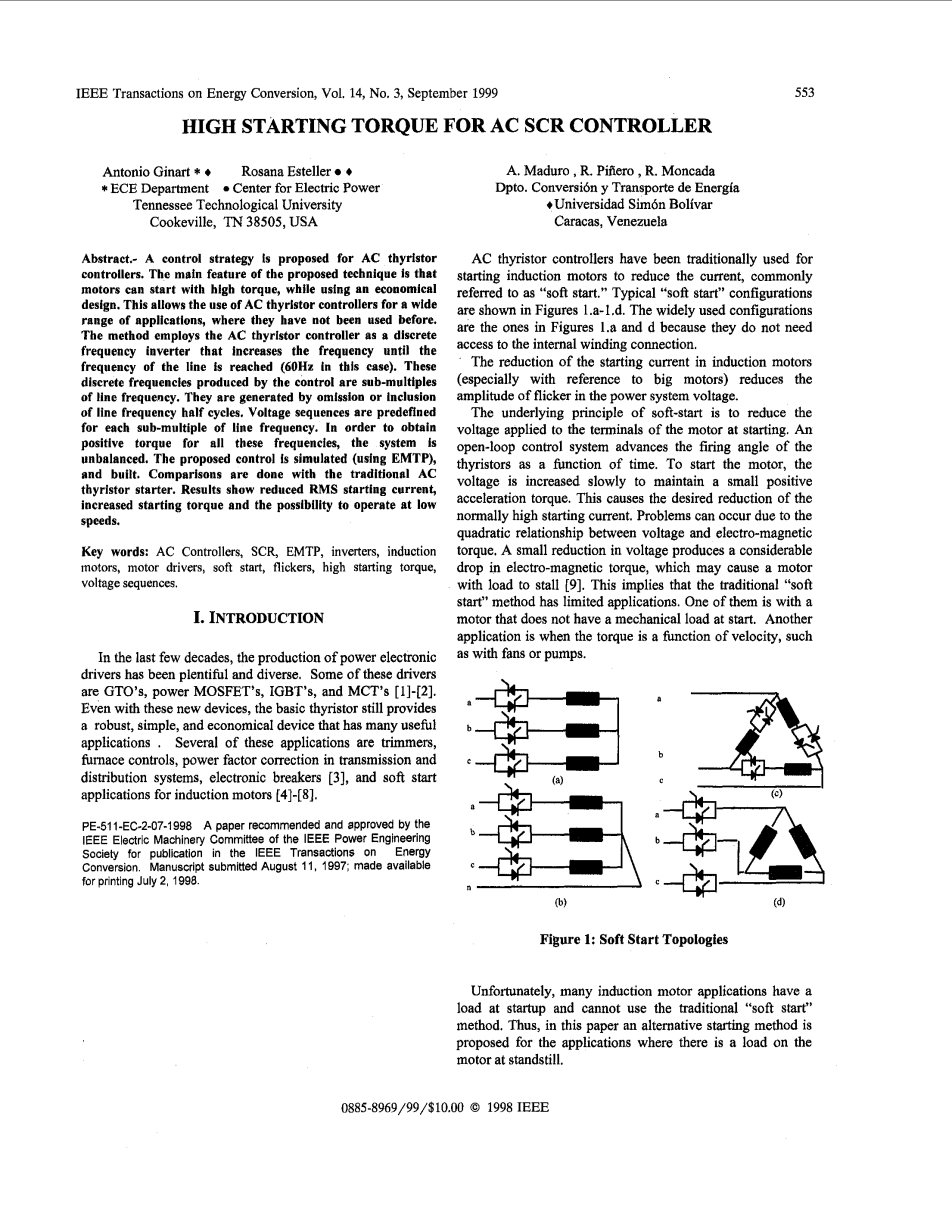
交流晶闸管控制器已被广泛用于起动感应电动机,以减少起动电流,通常被称为“软启动”。典型的“软启动”结构如图1.a-1.d所示。广泛使用的结构是图1.a和1.d,因为他们不需要有内部绕组的连接。
电机起动电流的降低(特别是对大电机)减少了电力系统电压闪变振幅。
软起动的基本原理是在起动时将电压落在电机的端子上,一个开环控制系统建立了以晶闸管的触发角作为时间的函数。启动电机时,电压缓慢增加,保持一个小的正加速度转矩,这通常会导致对高起动电流需求的减少。由于二次电压和电磁转矩的关系可能会出现问题,减小电压会使电磁转矩大幅下降,这可能会导致负载电机失速,这意味着传统的“软启动”方法具有局限性。在启动一个没有机械负载电动机诸如风扇或泵时,转矩是速度的函数。
然而,许多感应电机的设备在启动时都有负载,并且不能使用传统的“软启动”方法,因此,本文对带有负载的静止电机提出了一种替代的起动方法。
图1 软启动拓扑
- 简述
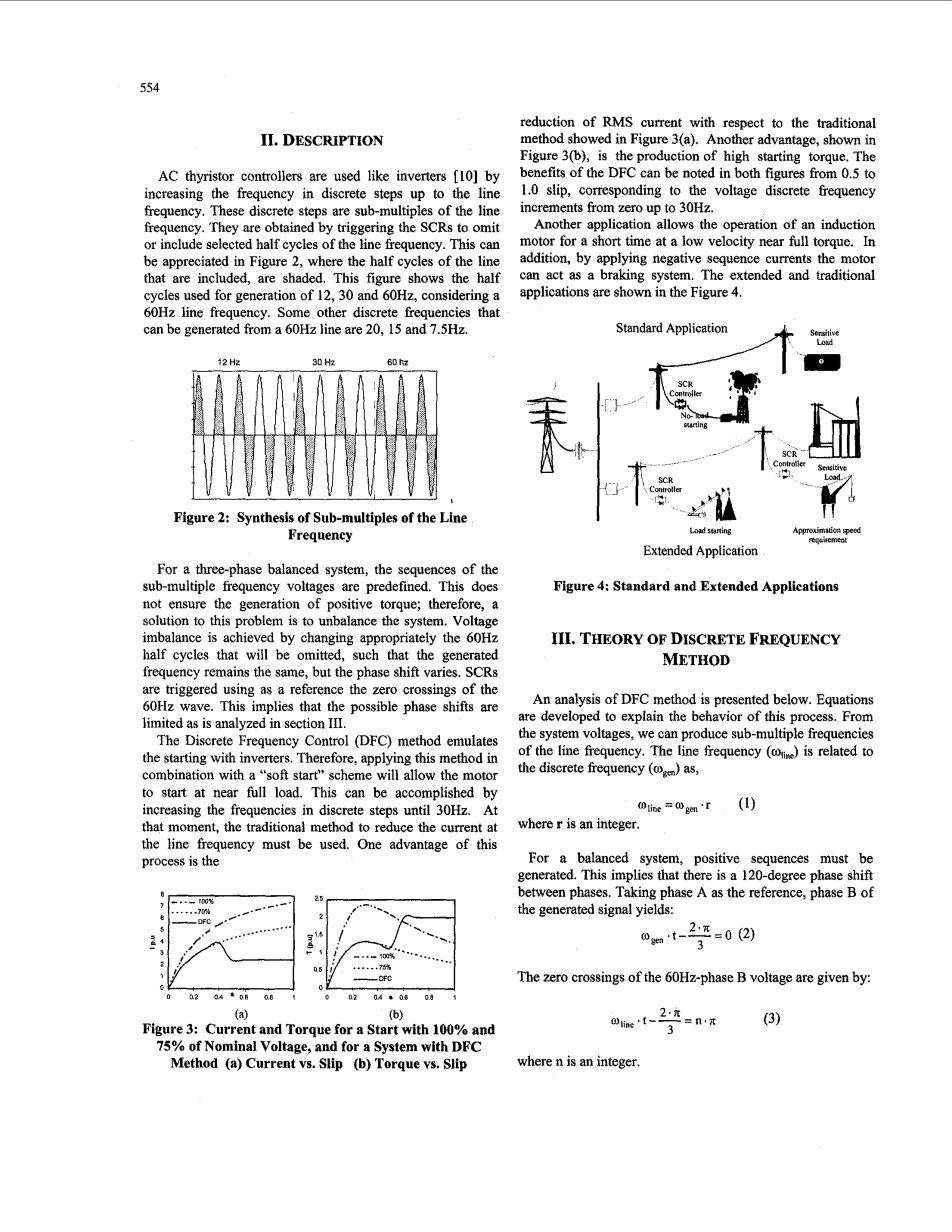
交流晶闸管控制器在离散变频的过程中被用作诸如逆变器来是频率增加到标准频率,离散的步骤中频率是标准频率的子倍数,他们是通过触发可控硅来漏去或包含工频半周期获得的,如图2中所示,其中包括被包含的线的半周期的阴影,此图显示了用于生成12,30和60Hz的半周期,基于60Hz的标准频率,其他一些离散的频率可以从60Hz线路产生的20、15和7.5Hz。
图2 工频子频率的合成
对于一个三相平衡的系统,该工频子倍数频率的电压序列是预定义的。这并不能保证产生正力矩,因此,只有不平衡的系统才能解决这个问题。电压不平衡是通过适当改变将被省略的60Hz半周期,所产生的频率保持不变,但相位变化。SCR使用作为参考的60Hz的波过零触发,这意味着可能的相移是有限的,在第III节分析。
图3 100%和75%额定电压下的起动电流和转矩
离散频率控制(DFC)方法模拟逆变器起动,因此,将这种方法应用于一个“软启动”方案,将使电机在接近满负荷时启动。这可以通过增加离散频率的步骤直到30Hz,在这时,必须使用传统的方法来降低起动电流。这个过程的一个优点是相对于传统的方法,如图3(1)显示的电流有效值的减少。另一个优势,如图3所示(二),是产生高起动转矩。离散变频的好处是可以使数字从0.5到1.0标记,对应的电压增量离散频率从零到30Hz。
另一个设备允许在短时间操作感应电机低速接近满转矩运行,此外,通过施加负序电流,电动机也可以作为一个制动系统。扩展和传统的设备如图4所示。
图4 标准和扩展设备
- 离散变频法理论
下面来分析离散变频方法。建立新的方程来分析这个过程。从系统电压,我们可以产生多个工频子频率。工频()与子频率()的关系为:
*r (1)
r为整数。
对于一个平衡的系统,必须产生正序列,这意味着有一个120度相移阶段。以相位A为基准,产生的信号的相位B的相位:
(2)
在60Hz的B相过零电压为:
(3)
n为整数。
可以产生和提供系统的正序列的子倍数,可以来自方程(1)-(3)。
(4)
重复同样的过程产生负序列:
(5)
这意味着预定义的子谐波序列和各自的频率是:
表1 平衡系统次谐波序列
从表1中,我们可以看到频率与谐波序列的关系。在30Hz的情况下,发电系统为负序。图6说明了30Hz的平衡系统为何符合负序,即60Hz系统的B相和C相分别对应于30Hz系统的C相和B相。
因此为了获得正序,30Hz系统必须是不平衡的。
图6 30Hz平衡系统的负序波形
上文的计算是对于平衡发电系统的,但对于任何发电系统(不一定是平衡的),我们可以定义一组通用方程如下:
(6)
再次假设A相为基准零相位,从方程(1)、(3)和(7),B相和C相可以表示为:
(7)
(8)
因此,所产生的电压的第一次谐波为:
(9)
(10)
值得注意的是,在一个周期内,60Hz发电系统的过零点数()由下式给出:
(11)
正如前文提到的,这种策略采用的是将负序转换为正序并使系统不平衡。对于频率为30Hz的情况,当r=2时,,n的可能取值如表2。因此,每一相有16()种方案,表2给出了所有B相和C相可能的组合。
表2 n在r=2时30Hz系统中的值
从十六种可能的情况中,我们选择了最平衡的一个,它对应于最高的正序列。通过用Fortescue转换对每种可能进行评估,选择的最高正序的相位角如下:
图7 频率为30Hz时最高正序
图8显示了系统变为不平衡系统以获得正序波形。
图8 30Hz不平衡系统中正序波形
可以进一步合成为:
图9 图8中波形正、负、零序图
由于系统是不平衡的,该电机具有一个减少的正转矩,如图10所示。
图10 合成转矩
运用同样的方法分析20Hz的情况下,获得36种可能性(包括相位角的任意组合)如表3所示。
表3 n在r=3时20Hz系统中的值
20Hz的非平衡系统中最高正序如图11所示。
图11 20Hz系统中最高正序
对于其他非正序列的离散频率,分析方法是相似的。
- 仿真
虽然这交流晶闸管控制器的实现比较简单,但由于晶闸管在电流降到零时会关断,所以分析比较复杂。微分方程组生成一个开环的抽象系统,数值分析由Lipo在三年前完成,在那以后已经有很多软件包问世,其中EMTP-ATP是应用最广泛的。
感应电机是使用UM模拟(通用机),采用d,q变换计算转矩和转速,然后将电流返回到起始系统A、B、C。DFC策略是通过Tacs来实施的(见图12).
图12 EMTP仿真
以三相模型来说,采用EMTP进行各种控制方案仿真,结果表明,在电动机起动过程中的电流有效值减少。从仿真得到了电流瞬时值用于计算每周期电流有效值,如图13绘制的曲线为电动机空载启动三种情况。第一个曲线显示了电动机的满电压启动,第二个为降压启动(软启动),第三个为离散变频启动。Y轴代表起动电流有效值。在DFC中,我们对三种频率(15Hz,30Hz和60Hz)进行模拟启动电机,可以看到电流随频率变化而波动。第一部分最小值是在15Hz,当频率变为30Hz,电流平滑增加。之后随着电流减小并逐渐趋向于稳定值,大约为额定电流的2.5倍。在这一点上,频率增加到60Hz,电流有效值增加与“软启动”曲线相匹配。
图13 三种电机空载启动的RMS电流曲线
通过用EMTP仿真从15Hz过度到60Hz来说,相应的电流和转速显示在图14和图15。在这种情况下,机械扭矩为全负载转矩86%的。为了使过渡频率得到放大,初始速度为10rad/s。图14可以看到在0.4s后,电机处于“15Hz稳态”,这时由于滑落平缓,所以电流值有效值很低。在这种情况下,可以计算得到电流有效值大于额定电流2倍。在“15Hz稳态”下运行0.5s后,在0.9s时频率变为60Hz,这时滑落增加,电流也增加。这表明,在“15Hz稳态“时电流为额定电流的两倍。只有两次额定电流可使感应电机在短时间内运转。
图14 感应电动机从15Hz离散变频到60Hz段A相电流
图15 图14对应的转速
- 实验结果
所建系统如图16所示。分别用7.5、15、30和60Hz离散变频以预定角度以获得所需的转矩和电流。为了抑制改变频率产生的转矩脉动,使用了一个简单的数字控制。其控制信号是从相电压中性点的过零点得到的,基于四位计数器。控制器每相有一个计数器,该计数器执行频率分割。这种控制器非常便宜,它意味着对软启动控制器的逻辑控制微调。
图16 DFC系统方案
图17和图18为电机空载运行时频率为30Hz时的电流和电压。电压接近正弦波,这是因为在频率接近30Hz时电机端子没有传导(SCR关断)。
图 17 30Hz时电机中性点线电压
图18 30Hz时电机起动电流
对电压和电流波形的谐波分析(图19)显示了相对较小的电压的谐波含量,这是由于电动机的感应电压。
图19 30Hz时的定子电流和电压谐波
一般来说,总谐波失真(THD)随着频率降低而增加,因为电机的感应电压降低(图20)。然而,在这个电流值下,THD也有变低的情况,在1.5p.u.左右,THD随频率的降低略微下降。这是因为多周期的低频可以产生离散频率。很显然,电机在这样的失真状态下是不能稳定状态的,除了某些时间段,高转矩操作是可能的。
图20 定子电流和电压THD
电机在这种条件下可以运行的精确时间是靠电机热模型来评估的。在任何情况下,考虑到热瞬态时间和以支持全起动电流的电机容量,可以估算这个时间是至少几秒钟。
由于大量谐波注入,电流THD可以影响弱电系统,电机脉动转矩的观察和评估将是一个有趣的研究方向。
图21显示电机在离散变频起动时的转矩,对额定电流(16A)下不同频率(7.5、15、30和60Hz)进行比较,发现转矩的减小符合电流等效理论。
图21 额定电流下电机转矩的比较
- 结论
离散变频起动是一种可以在将来改善传统“软启动”的方法。这里进行的分析,演示了如何产生正序的平衡或不平衡的离散频率系统,以减少启动电流有效值,离散变频启动方法使感应电动机以接近额定转矩降流起动。
采用离散变频启动,感应电机在低转速下有一个短期负荷运行的能力,在这种情况下,仿真结果表明,目前的电流为2倍的额定电流。实验结果证实了离散变频启动是一种简单、经济和有很大潜力的电动机起动器。
鸣谢
作者非常感谢Rangarajan M. tallam对原稿的建设性的评论。
参考文献
[1] B.K. Bose, “Power Electronic - An Emerging Technology”, IEEE Trans. on Ind. Elec., Vol. 36, No 3, pp. 403-412, August 1989.
[2] B.K. Bose, “Evaluation of modem Power Semiconductor Devices and Future trends of Converters”, IEEE Trans. on Ind. Elec., Vol. 28, No 2, Pages 403-413, March 1992.
[3] R. W. DeDoncker and J. A. Maranto, “Application of a Mobile Medium Voltage Sub-cycle Transfer Switch”, 1996 IEEE Transmission and Distribution Conference Proceedings, pp. 655-662.
[4] Lip0 T. A., lsquo;The Analysis of Induction Motors with Voltage Control by Symmetrically Triggered Thyristors”, IEEE Trans. on Power Apparatus and Systems, Vol. PAS-90, No. 2, March/April
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[147267],资料为PDF文档或Word文档,PDF文档可免费转换为Word



