全向AGV小车轮系运动特性研究毕业论文
2020-04-08 14:24:13
摘 要
如今的工厂存在空间有限,物流系统臃肿的问题,要想完成自动化运输,对AGV小车的灵活性有很高的要求,采用全向轮可以让AGV小车完成更复杂的运动轨迹,更好的灵活性让小车在狭窄有限的空间中可以高效地完成运输工作。本文以此为出发点,希望通过对全向轮系的运动特性研究,来提高小车的工作效率。
基于Mecanum轮(简称麦轮)的全向AGV小车的四个麦轮由四个独立电机单独控制,基于麦轮的特殊结构,根据速度合成原理,小车能够实现全向移动。从全向轮的选择,到麦轮种类、几何特征、辊子轮廓曲线的构建,完成对麦轮体系的深刻了解。再针对四轮结构的布局确定最优方案,建立该方案下的运动学模型,根据此运动学模型写出算法流程图。最后,对得出的结论通过ADAMS的仿真进行验证。
此文主要研究前后运动、左右横移、原地旋转、斜向45°运动,通过运动学分析以及仿真得到的振动图象,比较四种运动状态的优劣,为运动轨迹的规划提供理论基础,这样在规划路径时,就可以选择震动较小更稳定的运动方式,提高小车的稳定性。
关键词:仿真;Mecanum轮;轮系布局;逆雅可比矩阵;逆运动学方程;
Abstract
Modern factories have limited space and bloated logistics systems. In order to complete automated transportation, there is a high demand for the flexibility of AGV trolleys. The use of omnidirectional wheels allows AGV trolleys to complete more complex movement trajectories and is more flexible. Sex allows the trolley to efficiently complete the transportation in a narrow and confined space. This article takes this as a starting point and hopes to improve the working efficiency of the car by studying the omnidirectional train's movement characteristics.
The four wheels of the omni-directional AGV trolley based on the Mecanum wheel are individually controlled by four independent motors. Based on the special structure of the wheel, according to the principle of speed synthesis, the trolley can move omnidirectionally. From the choice of omnidirectional wheels to the construction of the types, geometrical characteristics and roller profile curves of the wheel, a complete understanding of the wheel system was completed. Then determine the optimal plan for the layout of the four-wheel structure, establish the kinematics model under the program, and write the algorithm flowchart according to this kinematic model. Finally, the conclusions reached are verified by the simulation of ADAMS.
In this paper, we mainly study forward and backward movement, left and right traverse,fixed axis rotation, and oblique 45° motion. Through kinematic analysis and simulation of vibration images, we compare the advantages and disadvantages of the four motion states to provide a theoretical basis for the designing of the trajectory. In this way, when planning the route, you can choose a smaller, more stable movement, and improve the stability of the car.
Key Words:Simulation;Mecanum Wheel;Wheelset Layout;Inverse kinematic equation;Inverse jacobian matrix;
目录
第1章 绪论 1
1.1研究背景及研究意义 1
1.2全向轮的种类及选择 2
1.3基于Mecanum轮的全向AGV小车的研究现状 4
1.3.1 AGV小车的发展历史及现状 4
1.3.2 Mecanum的历史及研究现状 4
1.4课题来源及主要研究工作 5
第2章 麦克纳姆轮结构 7
2.1麦克纳姆轮种类 7
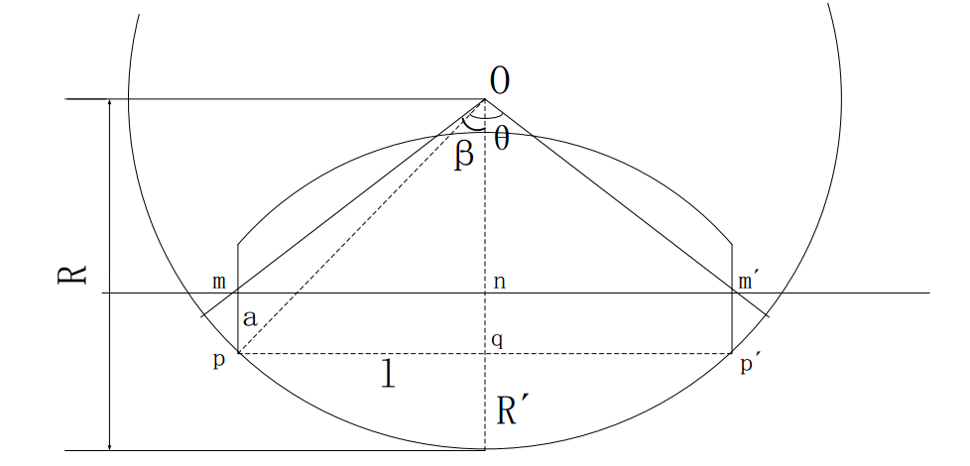
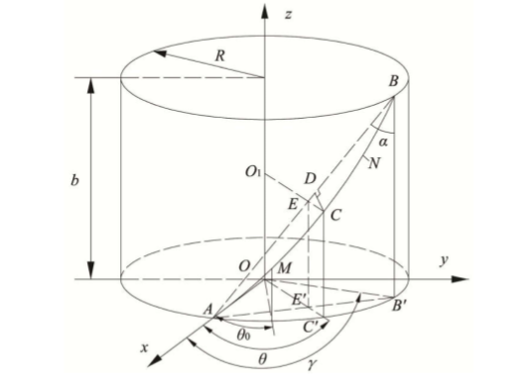
2.2麦轮几何结构分析 8
2.3麦轮参数化建模 10
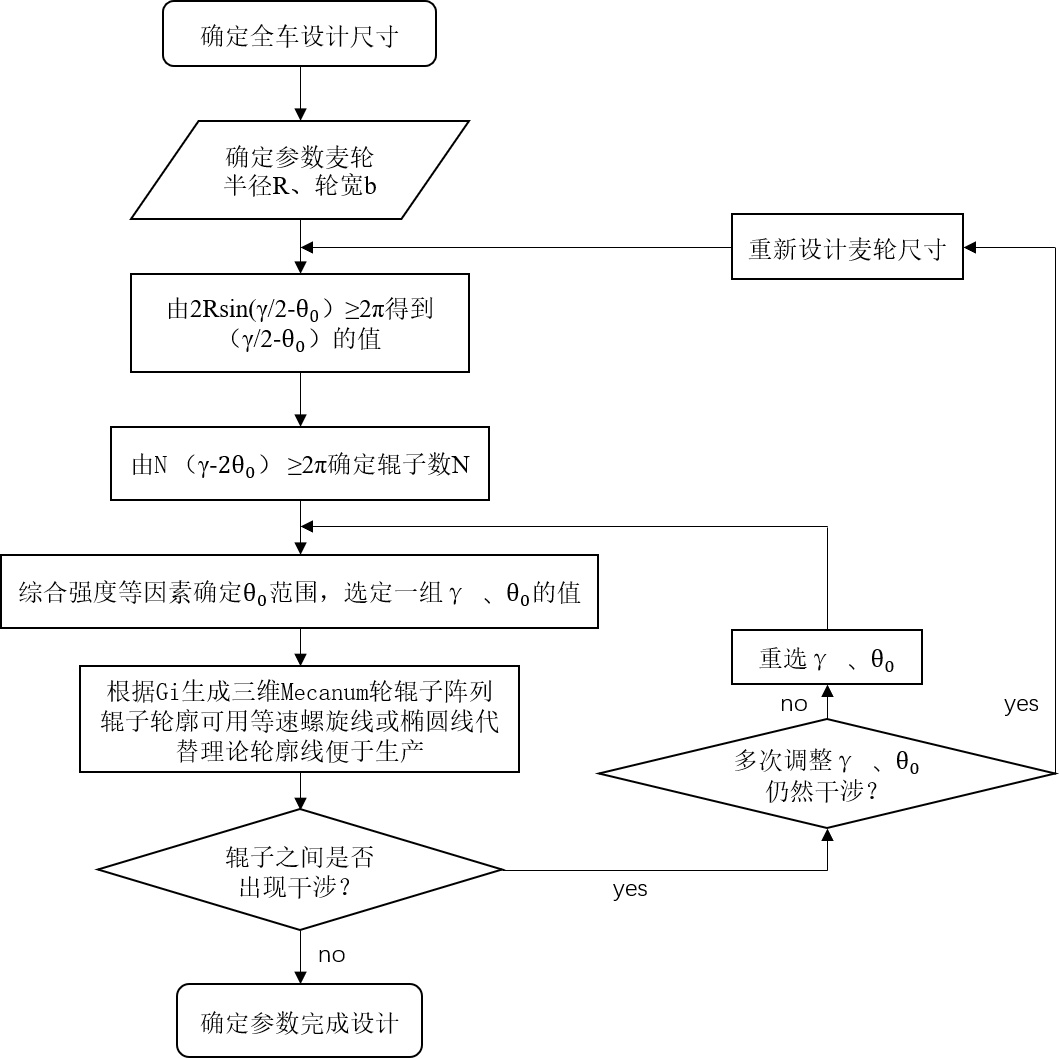
2.4麦轮设计过程综述 12
2.5本章小结 14
第3章 麦克纳姆轮轮系 15
3.1麦轮轮系布局方案选择 15
3.1.1速度映射分析 15
3.1.2运动解析 16
3.1.3布局方案优选 18
3.2麦轮轮系运动学模型构建 20
3.2.1运动学模型构建 20
3.2.2全向移动原理说明 22
3.3麦轮轮系控制算法拟定 26
3.4本章小结 27
第4章 麦克纳姆轮ADAMS运动仿真分析 29
4.1运动仿真 29
4.1.1建立虚拟样机 29
4.1.2四种运动状态仿真与分析 31
4.2振动分析 33
4.3本章小结 35
第5章 总结 36
参考文献 37
致谢 39
第1章 绪论
1.1研究背景及研究意义
目前,随着物流业制造业的不断发展,仓储、工厂的空间变得十分臃肿,因此需要在有限的空间内使工厂高效的运作,以求工厂的效益最大化。要实现这个目标,工厂对自动化的要求也就相应会提高。而这其中很重要的一环就是AGV(Automatic Guided Vehicle)自动引导小车,作为智能化运输设备,它能够按照计算机所规定的路径实现取货、运输、卸货等功能[1]。通过联网于柔性制造系统(FMS)或计算机集成制造系统(CIMS),缩短运输时间,增加承载量,大大提高生产效率,十分便捷[2]。这些奠定了AGV小车在物流生产业不可撼动的地位。
AGV小车的种类有很多,按导引方式分类,它分为固定路径引导方式和自由路径引导方式[2]。固定路径的引导方式一般有三种:电磁导引、磁带导引、光学导引[2]。这三种导引方式都存在着一些问题,他们需要预先埋设相应的电线、磁铁、色带,这会在一定程度上提高成本,且色带会给环境造成污染[3]。自由路径的引导方式一般有惯性导引、GPS导引、激光导引[2]。这几种导引方式路径更为灵活自由,激光导引目前使用较为广泛,因为它的精度较高,柔性好,应用场合较为广泛[2]。
按驱动转向模式可分为三轮转向、四轮转向、全方位移动结构,三轮结构又可分为三种,后轮驱动,前轮驱动,两轮差速驱动[4]。它的特点是转弯半径小,但承重和稳定性较差。四轮结构一般应用于汽车中,两驱的前轮转向型和四驱的四轮转向型。上述的都只有两个自由度,而全方位移动结构拥有三个自由度,在灵活性,智能性上更优于前面两种结构[2]。
能够全向移动的AGV小车具有平面上的三个自由度,可以实现零回旋半径的旋转运动,以及横移运动[5]。这个特性使AGV小车在障碍较多的仓储工厂环境中,能够灵活地完成复杂的运输路径。本文小车所工作的环境是一家瓦楞纸厂,它具有较为复杂的生产线,需要小车完成繁复的运动路线。出于这个目的,希望通过对全向AGV小车的轮系研究,来设计出更优化的运动轨迹方案,来提高小车的工作效率。
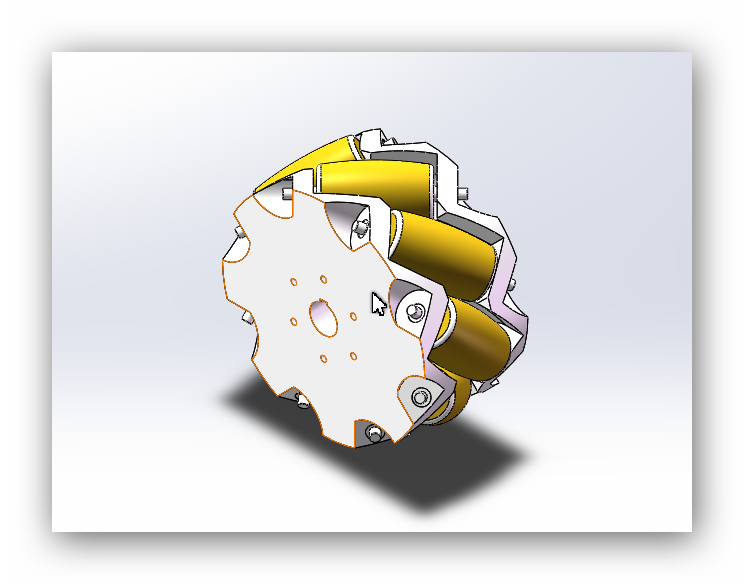
而要实现全方位移动,轮子的选择也就非常重要,全向轮的种类有很多,舵轮、球轮、正交轮、单排轮、双排轮、Castor轮、Mecanum轮等,本文根据小车工作环境选择了Mecanum轮作为研究对象。
本课题基于国内外的发展情况,了解全向轮的种类和各自的优点及应用场合,选择合适于瓦楞纸厂工作环境的全向轮,再考虑轮系的最优布局方案,最后拟定轮系的控制方案,尽量优化算法,使小车更为灵活的完成规定路径。
1.2全向轮的种类及选择
全方位移动是指在平面上拥有三个自由度,也就是能完成独立的左右、前后、原地旋转的运动[5]。传统的轮式机构是无法实现横向移动和原地旋转的,且这种机构转弯半径大,体积大。为了实现全方位移动,全向轮应时而生。常见的全向轮,有同样应用于AGV小车中的舵轮,也有球轮、正交轮、单排轮、双排轮、Mecanum轮等。本文中的AGV小车选择的是Mecanum轮作为全向轮。分析如下:
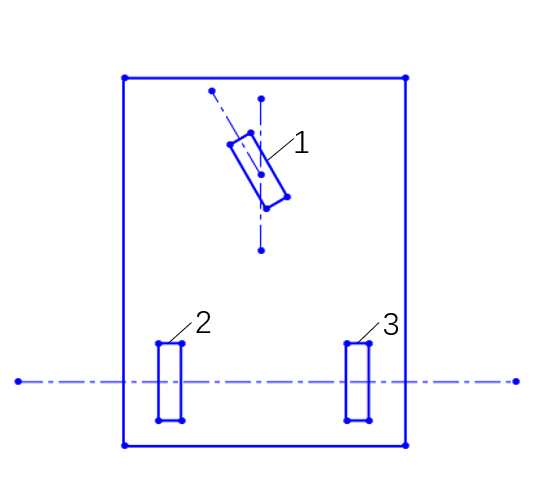
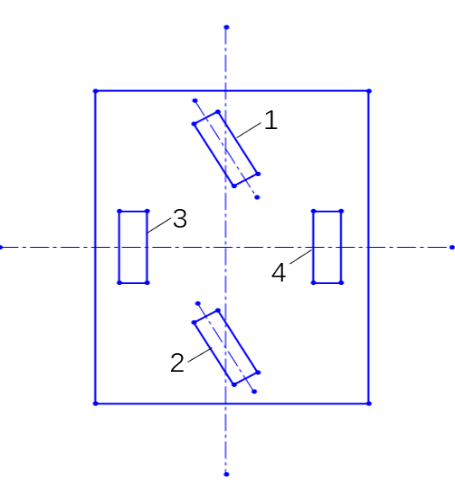
舵轮在AGV小车中的应用也很多见,如图1.1。一般分为单舵轮(如图1.2)和双舵轮(如图1.3)两种驱动方式。单舵轮是指有一个驱动轮,另外两个是固定脚轮,如图1.2中的轮1就是驱动轮,而轮2,3则是固定脚轮,作为从动轮。此驱动方式的AGV小车稳定性和运动性能都比较差,转弯半径较大;双舵轮是指有两个驱动轮,其他的两个或者更多的为从固定脚轮,如图1.3中轮1,2是驱动轮,轮3,4则为固定脚轮。当两个驱动轮转动角度方向都相同时,AGV小车可以实现平行移动。当两轮转动角度为90度时,AGV小车可以实现差速模式转动。在这种布局下,小车可以实现任意半径的转弯运动,灵活性很强。但是两个舵轮成本很高,而且可以观察到舵轮体积较大,会占用较多的空间。
| |
图1.1舵轮实物图 | |
|
|
图2.2单舵轮[6] | 图2.3双舵轮[6] |
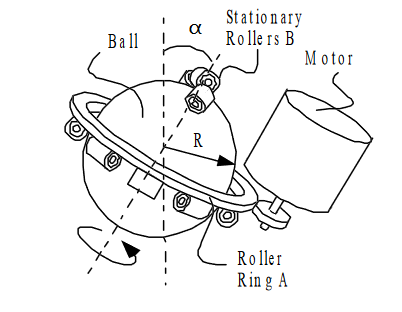
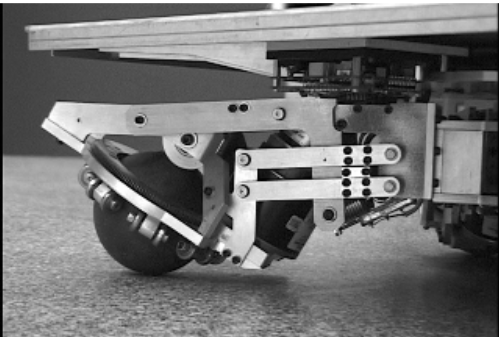
球轮的结构如图1.4所示,实物如图1.5所示,可以看到球轮的结构较为复杂。它对环境的要求比较高,沙尘、水等因素都会影响它的运行情况,并且球轮的加工难度较大,精度要求较高。这些因素都导致它并不适用于工厂这种复杂的运行环境[5]。它一开始是用在轮椅这种工具上,如图1.5所示。并且瓦楞纸厂所需的AGV小车对承重要求较高,需要4t的承重能力,球轮显然不适合。
图1.4球轮结构[7] | 图1.5球轮实物图[7] | 图1.6带球轮的轮椅[7] |
图1.7正交轮[8] | 图1.8单排轮[9] | 图1.9双排轮[10] |



正交轮[8]如图1.7所示,它由两个球体加工而成,每个轮子只能实现1/4的转动,也就是在正交轮运动过程中两个轮子交替接触地面,这样会造成一个问题,也就是在正交轮交替过程中,轮子的受力会发生突变,这样会导致磨损情况严重,转动速度会受到很大影响,精度上没法保证[5]。单排轮[9]如图1.8所示,运动时辊子在交替过程中有一段是空行程,因此会有较大的震动;双排轮[10]如图1.9所示,两排辊子交错排布,弥补了单排轮的不足,但这种结构稳定性较差。
上述全向轮都有各自的缺点,考虑承重、稳定性、灵活性的要求,我们最后选择了Mecanum轮作为AGV小车的轮系构成。Mecanum轮的优点在于,它的承重能力较强,稳定性高,满足瓦楞纸厂4t的承重要求,并且每个轮子都单独由一个伺服电机进行控制,在控制方面更为简便容易[5]。
1.3基于Mecanum轮的全向AGV小车的研究现状
1.3.1 AGV小车的发展历史及现状
在国外,AGV小车发展的较早,主要经历了四个阶段:20世纪50年代,美国的Barrett公司研制出世界上第一台自动导引小车,随后在1954年第一个系统被安装在南加州哥伦比亚城Mecury汽车货物运输公司[2];1954年,瑞士的Volvo Kalmar轿车装配厂将AGV小车应用到工业生产领域,多台AGV组成的装配线很大程度上增加了工厂的生产效率,此行为被很多公司效仿,让AGV小车在欧洲得到推广[11];80年代,随着互联网的发展,美国通用公司在1984年实现第一条柔性装配系统(FAS),成为AGV的最大用户[2];90年代,AGV小车开始走向高度智能化、数字化、网络化、信息化[2]。现如今,国外的AGV发展非常迅速,有一些AGV小车的承重可以达到一百多吨,一般采取更多的轮子提高小车的承载能力,这种小车广泛应用于集装箱等场所。在欧洲的一些国家,小车的速度可以达到8.5m/s。而日本则着重于拓展小车的功能,使其变得更加简便,实际应用能力更强[11]。
在国内,AGV起步比较晚,但是在短短十几年内发展迅速。从90年代开始,中国开始将AGV小车出口到韩国,这是一个重大进展[11]。直到2007年,中国开始有自己研发的AGV小车,并出口到欧洲等发达国家,这也意味着中国的AGV小车开始进入国际市场[11]。到2014年,AGV的增长率达到29%[11],在这一年,AGV小车被视为国内最新兴的产业,具有很深远的研究意义和价值。到如今国内市场对AGV小车的需求依旧不减,物流行业在网购等促进下飞速发展,仓储、工厂这些地方对其灵活性、经济性的要求也越来越高。
1.3.2 Mecanum的历史及研究现状
本文研究的全向AGV小车使用的轮系是Mecanum轮系,Mecanum轮最早由瑞士Mecanum AB公司的工程师Bengt Ilon设计提出[12]。美军在20世纪80年代买下其版权,用于在军舰上的物资搬运,在20世纪90年代,Airtrax公司等从军方买到其版权,由此,Mecanum轮开始逐渐走向民用领域[5]。自Mecanum提出之后,其研究方向主要有轮子结构、几何特征、运动学建模、轮系布局以及控制方法等方面。
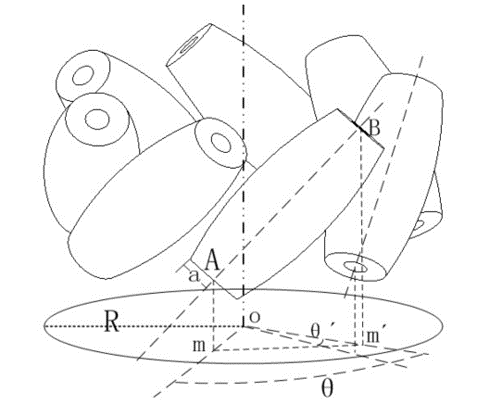
Mecanum轮主要有两种形式:两端支撑形式和中间支撑形式[13]。两端支撑形式承载能力较强,但是在不平地面或斜坡上,非辊轮的轮边缘会和地面产生摩擦,后者是由Bengt Ilon提出的一种改进形式,中间支撑形式的轮可以避免这一问题[14]。传统的Mecanum轮因为驱动力不能完全转换到运动方向上,造成效率低下,滑动摩擦严重等问题。对于轮子结构,Diegel提出了两种方案提高效率,一种是将辊轮设计成可自锁机构,一种是将辊轮相对于轮体的夹角设计为可调整的形式来适应不同方向的运动[15]。对于轮子的几何特征,目前没有对辊轮精确的曲面方程表述,Gfferrer[16]通过画法几何,分析了辊轮的几何特征得到了较为精确的曲面和母线参数方程。国内大多用近似曲线来表示,常用的有等速螺旋线、椭圆线、圆弧线等[17]。对于运动学建模和轮系布局,通过运动学建模分析,可用逆雅可比矩阵[18]来对布局形式进行选择。构建基于麦轮轮系的AGV小车的运动学数学模型一般会采用以下两种方法:矢量方法和变换方法[5]。Gfrerrer通过建模几何分析,推导出了精确的运动学模型。Angeles[19]通过矢量法推导了n轮的Mecanum全方位移动平台通用的运动学模型。Campion[20]等通过矩阵变换原理推导出AGV小车的三维运动学方程。
而基于Mecanum轮的AGV小车的研究热点难点则是运动控制。麦轮轮系在运动过程中麦轮会出现打滑现象,原因主要在于轮毂与地面之间在小车运动速度较高时,容易出现滑动摩擦,这种情况会导致构造小车的运动学模型难度变大,通常在小车的轮轴上设置编码器的传统方法在此处也会变得不适用,对于此状况,可视化航位推算应用于侧滑传感器[21]加强运动控制精度。精确的控制AGV小车是一个很有价值的研究方向。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: