智能挖掘机器人控制系统软件设计毕业论文
2020-06-20 19:24:05
摘 要
ABSTRACT III
第一章 绪论 1
1.1课题研究背景及意义 1
1.2国内外研究进展 1
1.3本课题主要研究内容及解决方案 3
第二章 挖掘机器人运动仿真分析 6
2.1 运动学分析 6
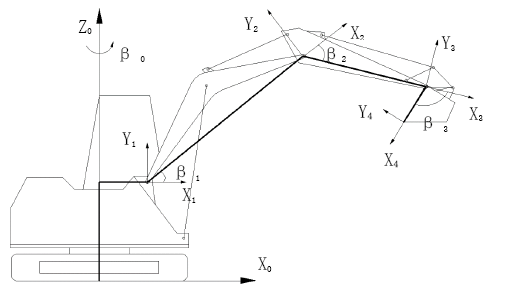
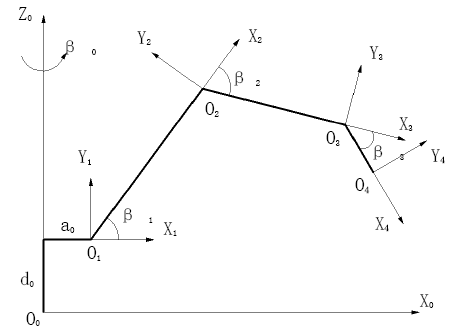
2.1.1 建立运动坐标系 6
2.1.2正运动学分析 7
2.1.3逆运动学分析 9
2.2基于Robotic Toolbox的运动学仿真 12
2.2.1 Robotic Toolbox介绍 12
2.2.2 运动学仿真模型建立 12
2.2.3 轨迹规划 14
2.3 仿真结果分析 18
2.4 本章小结 18
第三章 挖掘机器人工作装置的数学模型建立 18
3.1电液比例放大器传递函数 19
3.2电液比例阀的传递函数 19
3.3液压缸的传递函数 20
3.3.1动臂液压缸传递函数: 21
3.3.2斗杆液压缸传递函数 22
3.3.3铲斗液压缸传递函数 22
3.4本章小结 23
第四章 挖掘机器人工作装置PID控制仿真 24
4.1 PID控制原理 24
4.2 基于MATLAB/Simulink的PID仿真分析 24
4.2.1动臂PID控制系统仿真 24
4.2.2斗杆PID控制系统仿真 26
4.2.3铲斗PID控制系统仿真 28
4.3本章小结 29
第五章 总结与展望 30
5.1总结 30
5.2展望 30
致谢 31
附录一 参考文献 32
附录二 MATLAB程序清单 35
1、挖掘机器人建立 35
2、不考虑回转运动时各关节一的角度时间变化曲线 35
3、各关节角速度变化 36
4、各关节角加速度变化 38
5、铲斗齿尖在X-Z方向上位移量 39
6、油缸行程 39
智能挖掘机器人控制系统软件设计
摘 要
自2000年起,我国的经济高速发展,国家开始大兴土木建设,希望走现代化可持续发展道路,从而需要更多更大量的土方施工机械协助工作,因此,挖掘机这一土方施工机械的最主要机械产物,就显得越发重要。
挖掘机是工程建设中最主要的工程机械之一。在一些危险场合下,人工操作挖掘机施工逐渐显现出了一些弊端,例如,挖掘机在较陡的上下坡路上工作时,由于机身倾斜幅度较大,驾驶员在操作挖掘机时会因为重力作用而倾倒不能准确的把控机身,因此带来了诸多操作不便;又如,在一些危险场合工作,如山路,崖顶等地势,驾驶员人工操作挖掘机会受到诸多环境及心理因素的制约,留下诸多安全隐患。因此,智能的,可独立工作的挖掘机成为近年来研究的热点。
论文针对智能挖掘机的工作装置进行了控制仿真研究,主要工作包括:
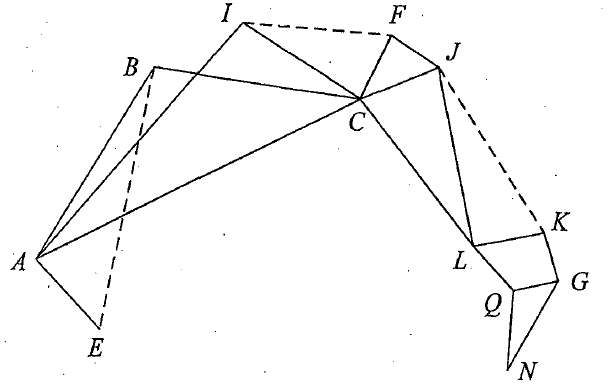
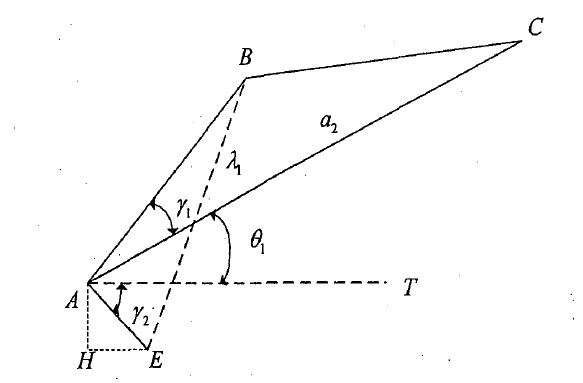
采用了经典机器人运动学中的D-H算法确立了挖掘机这一四连杆机构的坐标系,通过对其正/逆运动学的研究,计算出了挖掘机动臂液压缸,斗杆液压缸,铲斗液压缸对这三个工作部件的影响,通过数学经典几何算法计算出了它们之间的函数关系,然后再使用MATLAB,通过Robotics Toolbox对其进行数学建模,通过输入油缸长度来调节杆件的位置,最后再求得各部件之间的传递函数,通过PID控制对其运动轨迹进行仿真处理。
关键词:工作装置 轨迹规划 模糊控制 挖掘机器人 液压系统
The Software Design Of Intelligent Excavator Control System
ABSTRACT
Since 2000, China's rapid economic development, the state began to go be busy at putting up installations construction, modernization of the road of sustainable development, which requires more earthwork construction machinery more work, therefore, the main product of the mechanical excavator earthwork construction machinery, it becomes more and more important.
Excavator is one of the most important construction machinery in engineering construction. In some situations, manual operation of excavator construction gradually reveals some drawbacks, for example, the excavator work in steep downhill when the body tilt greatly, the driver will fall because of gravity can not accurately to control the body in the excavator operation, so bring a lot of inconvenience; again, in some dangerous situations, such as mountain, cliff and other terrain, the driver operating the excavator will be restricted by a lot of artificial environment and psychological factors, leaving many security risks. Therefore, the intelligent and independent excavator has become the focus of research in recent years.
The simulation research on the working device of the intelligent excavator is carried out in this paper:
By using the classical D-H algorithm in robot kinematics has established the 14 linkage mechanism of excavator coordinate system, through the positive and inverse kinematics research, calculate the excavator arm bucket rod hydraulic cylinder, hydraulic cylinder, impact bucket hydraulic cylinder on the three part, through the mathematical algorithm to calculate the classical geometry the relationship between them, and then use the MATLAB Robotics Toolbox, through its mathematical modeling, to adjust the location bar by entering the cylinder length, and finally obtained the transfer function between the various components, through the PID control simulation of the motion trajectory.
Keywords:Working device;Trajectory planning;Fuzzy control;Excavating robot
第一章 绪论
1.1课题研究背景及意义
挖掘机是现今人类社会中必不可少的重要大型机械,被广泛的应用于交通运输、工程建设、矿业、建筑、采石等各种领域中,但是其具有劳动强度大,工况复杂,在一些特定场合甚至可能会有危险状况发生等缺点,此外挖掘机的驾驶人员需要经过严格训练,且培训时间一般较长[1]。对于一些特定的任务,如果操作人员没有一定的工作经验,那么工作质量并不能得到保证。
相关图片展示: