机器手部强化驱动人体神经表征的改变外文翻译资料
2023-05-16 15:23:29

英语原文共 14 页,剩余内容已隐藏,支付完成后下载完整资料
机器手部强化驱动人体神经表征的改变
摘要
长期以来,人类一直对增强技术所带来的的可能性很感兴趣。这一愿景不仅取决于技术创新,还严重依赖于我们的大脑学习、适应和与增强设备交互的能力。在这里,我们研究了是否可以使用额外的机器人拇指成功地进行运动增强,以及它对生物手的神经表征和功能的影响。身体健全的参与者接受了超过五天的训练,以使用额外的机械拇指(称为第三拇指),其中包括基于实验的使用和非定式的日常使用。我们让参与者仅使用带有增强设备的一只手,去挑战通常用双手才能完成的任务,并检验他们培养手和机器交互协调的能力。参与者接受了各种行为和脑成像测试,旨在探究强化手在训练前后表现。训练提高了第三拇指的运动控制、灵巧性和手-机器的协调性,即使在认知负荷增加或视线受阻时也是如此。它还使得对第三拇指的感知能力有所增强。因此,运动增强影响了手部表达和运动控制的关键方面。第三个拇指的使用削弱了生物手的自然运动协同作用。此外,大脑解码显示增强手的运动表达在训练后轻度崩溃,即使在没有佩戴第三拇指的情况下也是如此。总之,我们的研究结果表明,运动增强可以很容易地实现,具有灵活使用、减少认知依赖和增强实体感的潜力。然而,增强可能会导致生物手表现的变化。这种神经认知结果对于未来增强技术的成功实施至关重要。
- 引言
运动增强是一个不断发展的领域,旨在扩展我们身体的能力。工程师目前正在研发更多的机械手指,甚至整个机械手臂,以通过发挥我们与生俱来的全部运动能力来增强我们的身体[1-6]。这些增强设备为了改变我们与外界的交互方式,需要改变我们移动和使用身体的方式。然而,尽管增强技术取得了迅速的进步,但一个关键问题却很少受到关注,那就是人类大脑如何去支持。在这里,我们研究人类大脑是否可以适应外加机械手指的运动控制,其重点在于它对生物手的神经表征的影响。
手在大脑中具有完善的功能性表征,每个手指相对于其他手指表示。这种对手部的神经指纹很早就形成了[7,8]。它存在[9]并且在参与者间[10]高度一致,即使在由于中风 [10]、脊髓损伤 [11]、失能 [12]甚至手部截肢而导致运动功能严重丧失后仍然保持不变[13-15]。同样,最近对人类运动学习的研究表明,虽然前运动区和顶叶区在强化运动训练的早期阶段(第一周)显示手部表征的重组,但初级运动皮层(M1)的手部表征在整个训练过程中保持稳定[16,17]。同时,手的表征已经被认为是日常手部使用的反应[10],研究表明它可能在受限的情况下被改变。对于音乐家的肌张力障碍,一种包括在高强度技能练习后手指受控增强的临床病症,单一手指的独立表征已被证明是不成立的[18]。然而,其他研究没能重现这一结果[19]。
在这里,我们训练了身体健全的人在5天的时间里使用额外的机械拇指 [第三拇指,由 Clode[20]设计,以下简称“拇指”],包括基于实验的和“在野外”无定式的日常使用。拇指是一个外加的机械手指,有两个自由度,由大拇指施加的压力控制,其旨在扩展手部本身全部的运动能力(视频1;图1,A和 B;和图S1)。我们测试了参与者在日常生活环境中使用拇指发展运动技能和灵巧性的能力,包括手-机器人交互这一关键方面,例如协作、共享监督和个性化。在训练期间,我们还跟踪(生物)手指共同使用并将其与正常手部使用进行比较。我们测试了运动控制和拇指实体感变化,以及训练前后的手-拇指协调性。将运动增强后的参与者与在佩戴静态版本拇指时接受类似训练的对照组进行比较。我们还测试了神经手和身体的表征训练后如何变化。我们假设成功的手-机器协同将促进手指同时使用的变化,从而改变生理和人为的身体表征。
视频1 研究方法、培训任务和关键结果的概述。使用第三拇指,我们检查了人们的大脑在学习使用额外的机械手指时是如何适应的。我们发现,经过 5 天的培训后,参与者能够将拇指的运动控制与他们自然手的动作结合起来,报告说增加了对设备的体现感。然而,使用拇指影响了参与者的自然手部运动和手部在大脑中的表现。
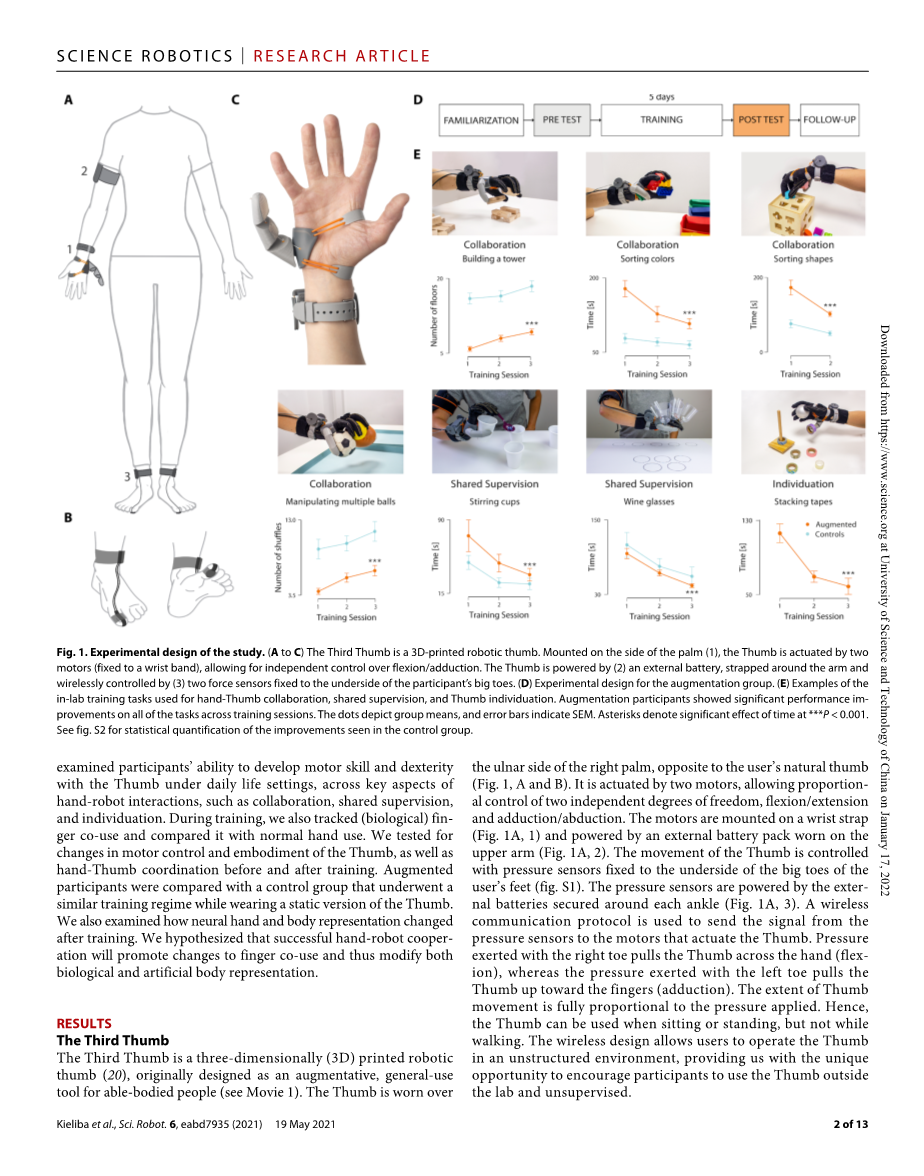
图1 研究的实验设计。(A-C)第三个拇指是 3D 打印的机器人拇指。拇指安装在手掌 (1) 的一侧,由两个电机驱动(固定在腕带上),可以独立控制屈曲/内收。拇指由(2)外部电池供电,绑在手臂上并由 (3)两个固定在参与者大脚趾下方的力传感器无线控制。(D) 增强组的实验设计。(E) 用于手拇指协作、共享监督和拇指个性化的实验室内培训任务示例。增强参与者在培训课程中的所有任务上都表现出显着的性能改进。点表示组平均值,误差线表示 SEM。星号表示时间对***Plt;0.001的显着影响。见图。S2用于对对照组中看到的改进进行统计量化。
2.结论
2.1第三个拇指
第三个拇指是一个3D打印的机器人拇指[20],最初是为身体健全者设计的增强通用工具(参见视频1)。拇指戴在右手掌的尺骨侧,与用户的天然拇指相反(图1,A和B)。它由两个电机驱动,可以对两个悬垂自由度的弯曲/伸展和内收/外展进行比例控制。电机安装在腕带上(图1A,1),并由佩戴在上臂上的外部电池组供电(图1A,2)。拇指的运动由固定在用户脚的大脚趾下方的压力传感器控制(图S1)。压力传感器由固定在每个脚踝周围的外部电池供电(图1A,3)。无线通信协议用于将信号从压力传感器发送到驱动拇指的电机。用右脚趾施加的压力将拇指拉过手(屈曲),而用左脚趾施加的压力将拇指向上拉向手指(内收)。拇指移动的程度与施加的压力完全成正比。因此,大拇指可以在坐和站立时使用,但不能在走路时使用。无线设计允许用户在非限定环境中操作拇指,为我们提供了一个特别的机会使参与者得以在实验室外无人监督的情况下使用拇指。
2.2即使视觉信息减少或认知负荷增加,日常训练也能提高手-机械拇指的协调能力
我们首先在拇指使用的5天中归纳了强化手的运动性能。增强参与者每天完成五次实验室内培训课程(1.58plusmn;0.22小时;平均值plusmn;SD),另外还鼓励他们在实验室外的非固定环境中使用拇指(2.61plusmn;1.18小时;自我报告)。自动使用日志中量化的平均使用时间为2.95plusmn;0.84小时/天,其中总共1.37plusmn;0.49小时发生主动的拇指移动。
在日常培训课程中,向参与者展示了各种伸手、抓握和手部操作任务,旨在引入复杂的手-机器交互,并有目的地挑战仅用一只手执行(参见视频S1)。在协作任务中,参与者必须同时使用拇指与另一根手指拾取多个对象。在共享监督任务中,参与者必须使用拇指来增强手部原有的的抓力并减少自身手指的使用。最后,在个性化任务中,参与者必须在将手忙于抓与任务无关的物体时,用拇指进行精细的运动控制。增强的参与者在所有训练任务上都表现出显著改善(所有任务的时间主效应:Plt;0.001,eta;p2gt;0.5;图1D)。
使用手-机械拇指协调的任务进一步评估运动控制,要求参与者将拇指相对于他们自己的指尖。尽管用大脚趾控制拇指似乎不寻常,但参与者即使在摸底评估时也能够成功地执行手-拇指协调任务(图2B),尽管这种表现在训练后得到了显著改善。在日常训练中观察到显著改善 [F(4,76)=28.24,Plt;0.001,eta;p2=0.6;图 2,A到C) 并在比较5天训练前后的表现时,使用相同任务的顺序变化(参见材料和方法)。在这里,增强后的参与者不仅在可以看见时 [t(19)=8.96,Plt;0.001,eta;p2=0.81],而且在蒙眼时都[t(19)=7.40,Plt;0.001, eta;p2=0.74;图 2E]显示出显著的改善,表明拇指实体感得到改善。
图2 手部增强的行为相关性。(A-C) 增强参与者在手-拇指协调任务上表现出日益显著的改进。(D)在训练的第一天和最后一天,使用拇指的运动表现不受认知负荷增加的影响。(E)在训练前后进行的手-拇指协调任务上,增强参与者比对照组表现出更大的进步。即使被蒙住眼睛,参与者也表现出更好的表现,这表明拇指本体感增强。(F)拇指训练后,增强组中自我报告的拇指实施例显着增加。培训期间收集的手部运动学数据。与对照组相比,第一台PC(所有五个手指的同步运动)在增强组中发现的差异较小,表明同步运动较少。(Hamp;I)增强组显示出较低的指间耦合,相对于拇指使用期间的控制,表明自然手指协调发生了变化。条形表示组均值,误差条表示SEM。单个点对应于LMM预测的单个参与者的平均手指间(D1到D5)协调分数(参见材料和方法)。星号表示*Plt;0.05、**Plt;0.01和***Plt;0.001 时的显着影响。
由于上述改进可能因任务重复而出现偏差,我们还测试了一组11名的对照参与者,他们接受了类似的前后测试和训练方案,但在相同的持续时间内佩戴静态版本的拇指,4.11plusmn;1.06小时/天[t(29)=0.526,P=0.6,贝叶斯因子 (BF)= 0.39],其中2.93plusmn;1.34小时在实验室外[t(29)=-0.697,P=0.49,BF=0.42磨损时间组比较]。与增强组类似,对照组必须针对相同的问题开发五指解决方案,在几乎所有训练任务中都显示出成比例的改进(图S2)。由于控制参与者不必学习控制机器人设备,因此与增强组相比,除了共享监督任务外,他们的训练表现明显更好。这表明在特定的任务要求下,拇指提供的扩展运动能力也可以提高参与者的功能效率。对照组仅允许在前后顺序手-拇指协调测试期间使用拇指。尽管控制参与者显示出显著的改进[有视力:t(9)=3.74,P= 0.005;无视力:t(9)=2.35,P=0.043],明显低于增强组中观察到的,均具有视野[协方差分析(ANCOVA)显示组的显着影响;F(1,27)=22.86,Plt;0.001,eta;p2=0.44]和蒙眼 [F(1,27)=11.96,P=0.002,eta;p2= 0.28]。
有效增强的一个关键组件是能够同时执行多任务,即使在不在故意控制设备的情况下也是如此。拇指增强参与者的运动表现不受认知负荷增加的影响。这在训练的第一天和最后一天进行了测试,使用双重任务[21,22],要求参与者执行简单的算术运算,同时使用拇指完成协作任务(搭建塔)。我们发现没有显著的认知负荷times;会话交互[F(1,16)=0.003,P=0.959,BF=0.34]并且没有认知负荷的主要影响[F(1,16)=2.465,P=0.136,BF=0.32;图2D]关于电机性能。同时,参与者犯了一些的算术错误(平均占每个参与者的15%到19%),这表明双重任务确实增加了认知负荷需求。
总之,这些结果表明参与者学会了在各种情况下操作拇指,超出了他们的特定训练范围,并且在认知负荷增加和不增加的情况下表现相似。然而,除了共享监督任务外,增强组
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[591366],资料为PDF文档或Word文档,PDF文档可免费转换为Word



