液压离合器驱动系统的模型设计外文翻译资料
2021-12-20 21:44:43

英语原文共 6 页
液压离合器驱动系统的模型设计
来源:《IFAC》PapersOnLine 51-2(2018) 67~72
作者:Felix Mesmer,Lothar Kiltz,Knut Graichen
摘要:这篇文章阐述了湿摩擦离合器间接控制液压驱动路径的精确动力学模型。考虑到夹带空气导致的液压流体的可变压缩性,该模型处于一个相对较低的压力范围。此外,该模型设计考虑了复杂的阀体几何形状以及阀体由于注射成型而产生的拔模角度。通过Prandtl-Ishlinskii和LuGre的计算,相关的阀门的滞后现象被模拟了出来。仿真结果表明,与实测数据相比,该模型的平均误差为0.9%(180mbar)。此外,还用恒定的体积弹性模量进行了对应的模拟,验证了夹带空气的必然性,这是必须被尊重的事实。
关键词:电液系统,滞回,摩擦,仿真,试验台。
介绍
双离合器变速箱通常由液压驱动路径控制。然而,直接调整离合器扭矩或离合器压力是困难的,因为这些数据通常没有实际测量的方法或是因为经济原因。这促使对液压驱动路径进行深入的数学模型设计,以便能够准确地调整离合器扭矩,例如采用前馈控制策略。
本文所考虑的液压系统用于重载领域的多组双离合器变速箱,如轮式装载机或自卸车(Mesmer等,2017)。就这一点而言的重要的是1bar到10bar的相对较低的工作压力的问题和不可忽略的空气夹杂在液压油中的问题,这是由于液压管路在换挡开始和结束时的填充和排空过程。此外,所考虑的液压离合器压力阀具有高度复杂的几何形状,其滞回现象不可忽略。
与大多数其他文献相比,这些方面会显著地使模型设计复杂化。一方面,较低的压力范围和空气比率导致的流体的压缩性的改变会对获得一个准确的水力驱动路径模型产生影响,而大多数文献考虑的是恒定的压缩性,没有空气进入油中,见Merritt(1967);Murrenhoff and Linden(1998);Steinboeck等(2013)。另一方面,文献中考虑到的大多数阀门具有“良好”的几何形状(没有考虑由于注射成型造成的阀壳的拔模角度),例如Khan等(2005);Rahmat等(2011),这些文献反对本文所考虑的离合器压力阀的复杂形状。
采用集总参数法对液压驱动系统进行建模,在保证模型足够精度的前提下,使系统的复杂程度明显降低。为了考虑控制离合器压力阀体边缘的几何形状,计算了其面积位移特性,并存储在查找表中。此外,离合器压力阀的摩擦滞后是由LuGre模型建模的(见Johana-strom和Canudas-De-Wit(2008)),因为它可以捕捉粘滑行为和速度依赖性。对于电液先导阀,除了摩擦力外,电磁铁还会引起滞回现象。由于该阀的快速动力学特性,采用扩展的Prandtl-Ishlinskii模型对其进行了准静态建模,见Zhang等(2014)。
由于不是所有的模型参数都能由设计参数或者由于简化假设而预先计算出来,所以在液压系统试验台进行W.R.T测量数据的参数辨识。由于这种方法不需要任何因变量的导数,因此该识别使用粒子群优化(PSO)算法(Poli等,2007;Zhan等,2009;Clerc,2012)。这对于参数辨识是有好处的,因为模型不是连续可微的。
本文概述如下:第2节给出了液压驱动路径的原理设置和系统模型。第3节讨论了参数识别,并将仿真结果与试验台的测量结果进行了比较。最后,在第4节中得出结论。
模型设计
本节涉及液压驱动路径的模型设计。系统的概述如图1所示。
图1 供给泵、离合器执行机构和四个阀门的液压驱动路径概图
图1所示,它包括供应泵、限压阀——系统压力阀(SPV)和压力控制阀——减压阀(RPV)——用来产生(尽可能恒定的)供应压力。SPV为系统提供主系统压力,RPV进一步将系统压力降低到电液先导阀(EPV)使用的压力。EPV从控制信号产生压力信号,由离合器压力阀(CPV)放大,产生离合器压力。
供应压力和
图2 在离合器压力阶跃响应过程中的供给压力
图2显示了在EPV线圈电流阶跃过程中在试验台(见第3节)上测量的系统压力。在离合器压力快速变化的短期时间内,相对大的流量被转移到或从离合器柱塞流出。这使SPV产生了明显的反应,因此,供应压力的短期变化如图2所示。绿色椭圆标记供给压力的下降,即离合器的充盈,导致压力略有下降。另一方面,用红色椭圆标记的上凸,表示随着流向离合器的流量降至零,产生轻微的压力增加。
然而,在相关的压力范围内,离合器已经充满油,只需要体积流量的一小部分。因此,假设一个恒定的系统压力是有效的。同样的道理也适用于压强,因此它也被假设为常数。
电液先导阀(EPV)
EPV是一个电液3/2比例压力控制阀,它产生一个与流过电磁铁线圈的电成比例的压力,如图1所示。输入压力由RPV提供。然后输出的压力被CPV进一步放大。
EPV实现了对的相对快速的闭环控制(带宽可达200Hz),而其余的液压离合器控制路径则慢得多(带宽在10Hz范围内)。因此,可将上的瞬态变化看作离合器控制的奇异摄动,这对目前研究的来说是次要的。相反,为了获得较好的模型精度,需要考虑磁化损耗和摩擦引起的准静态滞后。
为此,我们扩展了Prandtl-Ishlinskii模型,参见Al Janaideh等(2009),来描述当前与产生的压力之间的关系,即
(1)
参数表示定义的操作阈值,是第j个操作的权值,用常数来补偿压力死区,因为只有压力gt;才会导致离合器压力gt; 0。操作阈值的运算定义为
(2)
时间的离散化形式为,kisin;。更详细的描述可以在Krejci and Kuhnen(2001)以及Al Janaideh等(2009)中找到。总的来说,我们选择了N=5个操作阈值,这使得模型的复杂度较低,并且可以轻松地计算出逆模型,参见Zhang等(2014)。这一点,举个简单的例子,在未来使用逆系统模型进行前馈控制设计时非常重要。
离合器压力阀(CPV)——液压子系统
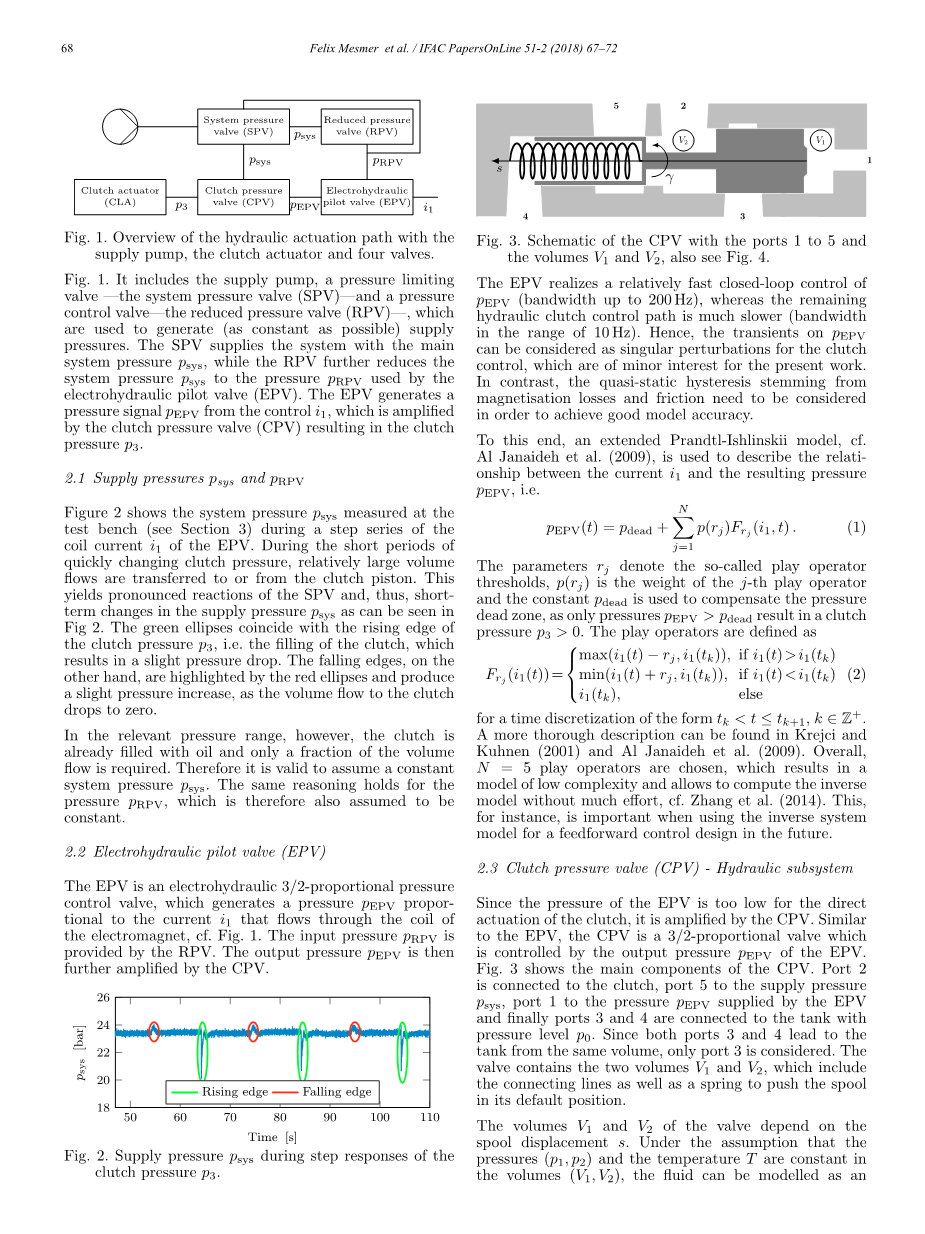
图3 CPV的1-5油口的和,容积示意图
由于EPV的压力过低,无法直接驱动离合器,所以需要使用CPV进行放大。与EPV类似,CPV是一个3/2比例阀,由EPV的输出压力控制。图3为CPV的主要组成部分示意图。油口2连接离合器,油口5连接压力源,油口1的压力由EPV作为压力源,并且最后的油口3和油口4连接压力级为的油箱。由于油口3和油口4从相同的容量通向油箱,因此只考虑油口3。该阀包含两个容积和,其中包括连接管路和将滑阀推到其默认位置的弹簧。
阀的容积和取决于阀芯的位移s。在假设体积(,)和压力(,)和温度T恒定的情况下,可以将流体建模为具有非恒定体积弹性模量的等熵流体。由于相对较低的压力范围和降低模型复杂性,假设密度为常数。基于质量守恒,可以得到两个容积中的压力的常微分方程
(3)
(4)
其中和为滑阀位置s在初始位置的两腔容积,即此时s=0。取决于s的体积变化可由面积和算出。体积弹性模量beta;的详细描述如下且流量已与本节的末尾得出。
文献中常见的假设是油的体积弹性模量恒定,例如Merritt(1967);Murrenhoff and Linden(1998),但由于油中夹带空气和相对较低的驱动压力,这种假设不适合本文所讨论的液压驱动油路。一般来说,油液/空气混合物的体积弹性模量beta;取决于压力、温度和残留空气的比例。由于离合器系统在重型机械领域的应用很广,因此油温可以假定为恒定的。这里使用一个足够精确的体积弹性模量模型(Beater,1999)
(5)
在参考压强下的体积弹性模量,等熵指数kappa;,残留空气比xi;假定为常数。对于不同体积弹性模量模型及其有效用的概述,请参见Gholizadeh等(2011,2012)。
图3中油口3和油口5处的流量q3和q5由于存在尖锐的边缘而被建模为湍流。3、5油口的面积位移特性通过小开口得到增强,平滑了从封闭到开放腔室边缘的过渡,如图4所示。图4显示了油口3和5从开放到封闭的阀芯的位移s产生的各个角度gamma;,角度gamma;是围绕轴线上的轴向位移s旋转的(见图3)。由于复杂的几何形状,没有与之有直接关系的区域位移特性可以被发现。
图4 当量化的几何形状(即从打开到关闭的过渡过程)和CPV的油口3和5的面积(s)
假设油中剪切应力可以忽略,则通过油口3和油口5的流体可以被建模为无穷小湍流体路径上的积分,根据
(6)
式中,,压力的差值,,并且收缩系数的自变量为轴向位移s和转动角度。函数的描述阀在点的开口过程,其自变量为轴向位移s和转动角度(见图3)由此表示流量的最小开度面积。
图5 CPV的油口3和5d 标准化几何函数和
两油口3和5的函数为图5所示。在假设恒定的质量密度rho;和压差下,通过节流阀完整的打开过程(参见每个gamma;数值),可以计算流量体积
(7)
当的值很小时,湍流变为层流。这尤其适用于以下情况:如果一个油口(几乎)是关闭的,并且由阀门的泄漏流量决定。为了解释这种效应,文献中提出了不同的收缩系数模型,如Wu等(2002, 2003)。然而,在给定的情况下,没有解析表达式可以被推导出来,这是因为阀门的复杂的几何形状。因此,需要将(7)中的整体积分项重新表述为
(8)
式中,平均收缩系数符合时,可以定义为
(9)
这个二次定义允许分离几何面积的计算的平均收缩系数而没有计算外显函数。每个油口的都可以通过来源于阀的几何数据进行数学计算,其中,参见图4,而则是在试验台的液压系统中确定的。
阀剩下的流量体积()比()小得多,并且在阀的油口附近没有尖锐的几何部件或边缘。因此,这些流量可以建模为层流
(10)
(11)
式中,层流系数、及对应的水力管路连接压差,参见图1。
离合器压力阀(CPV)-机械子系统
CPV机械部分包括铸铝块和在铸铝块的孔洞中移动的质量为m的滑阀组成。牛顿第二定律说
(12)
式中,轴向位移s和力的描述如下。右边的第一项表示的是与弹簧刚度的有关的弹簧力,如图3所示。压力是作用于和区域的压力和的压力的差值,即
(13)
在(12)的右手边的第三项是使用形式为LuGre模型的阀芯的轴向摩擦力
(14a)
(14b)
式中,阻尼参数(sigma;0、sigma;1sigma;2)。此外,Stribeck效应被捕捉为
(14c)
式中,库仑摩擦力和粘着力。选择delta;参数为delta;=1,参见Johanastrom和Canudas-De-Wit(2008),减少定义的变量。
模型(12)的后两项运算符描述的是在3和5油口处的喷射力,这是由于油液通过阀门的体积流动方向的变化或滑阀的快速移动造成的(Zhang,2011)。在下文中,只有固定喷射力(见例Kemmetmüll(2008))被视为体积流量的大小不会在离合器考虑的压力范围内过分改变,并且滑阀的移动足够缓慢。然后可以对喷射的力量进行建模,根据
(15)
式中,喷射角,这取决于阀的几何形状。注意作用于阀门开启的相反方向,因此总是作用于关闭各自的控制边缘。角度假定为常数,由于对径向间隙的依附性仅与接近重叠的情况有关,因此忽略了它。它们将在测试台中被识别(见3.1节)。喷射角的标称值可以在Von Mises(1917)中找到。
离合器压力及小结
离合器液压缸容积一般取决于离合器的位移。然而,由于假设离合器已经移动到接触点(例如,开始换挡),可以假设为充分近似的常数。此外,从CPV到离合器的液压管路中的油液的速度足够慢,就可以假设其为层流。这就得到了离合器压力的微分方程
(16)
其中
(17)
式中,为离合器泄漏的层流系数。
总之,整个液压驱动油路的动力学模型包含状态向量和微分方程(12),(14),(3),(4)和(16)。
结果
本节首先讨论参数识别,然后给出仿真结果,并与试验台实测数据进行对比。所有没有相应单元的测量和仿真结果都当量化为各自的最大值。
参数定义
虽然液压系统动力学模型的大部分参数都可以通过设计量来计算,但仍有一些模型参数需要通过实验来确定。一个积极的副作用是,模型设计中的简化或假设在一定程度上被实验结果所补偿。为此,进行了多个实验(如阶跃响应、三角波、小信号阶跃),覆盖了换挡的整个动力学过程。由于采用重载荷应用,油温需保持恒定,见第2.4节。
待确定的主要参数涉及层流系数,由于泄漏间隙的确切几何结构未知(阀芯可能未完全居中),以及摩擦参数严重依赖于制造公差。进一步未知的参数是油中夹带空气的比例xi;和喷射力(15)的角度。此外,离合器压力阀的平均收缩系数,为试验台轴位移s资料编号:[4254]



