轻型环卫车垃圾桶自动捕捉装卸机构设计毕业论文
2020-02-17 17:51:06
摘 要
随着经济的进步、社会的发展、人口的增长,生活垃圾日益增多,垃圾处理的形势变得日益严峻起来。环卫工作与我们的日常生活息息相关,垃圾的高效、清洁的运输更是其中重要的一环。
本文是针对现在广泛使用的挂桶式垃圾车的一个缺陷,装卸过程对人工依赖很大,设计了一种可以用于轻型环卫车上的自动捕捉和装卸机构。主要研究了机构的结构设计,分析实现自动捕捉的途径,并将二者结合起来,实现装卸过程的机械自动化。最后,用ANSYS软件对设计的机构进行简单的静力学仿真分析,得到设计的机构符合强度要求,也为机构的优化提供了思路。
所设计的机构只需要在布置上进行细微的调整,就可以很好地与现有的提升倾倒装置配合使用。与现有的挂桶式垃圾车的工作方式相比,本机构的设计可以在一定程度上减轻环卫工人的工作强度,也缩短了垃圾桶的清运周期。
关键词:挂桶式垃圾车;测距定位;自动装卸;液压驱动;机械臂
Abstract
With the progress of economy, the development of society and the growth of population, the situation of garbage disposal becomes increasingly serious.Sanitation work is closely related to our daily life, and the efficient and clean transportation of garbage is an important part of it.
This paper is aimed at a defect of the widely used dumpster truck. The loading and unloading process relies heavily on human labor. A kind of automatic capture and loading and unloading mechanism can be designed for the light sanitation vehicle.This paper mainly studies the structural design of the mechanism, analyzes the ways to realize automatic capture, and combines the two to realize the mechanical automation of loading and unloading process.At last, the static simulation analysis of the designed mechanism is carried out with ANSYS , and the results show that the designed mechanism meets the requirements of strength, which also provides ideas for the optimization of the mechanism.
The designed mechanism needs only minor adjustments in layout to be able to work well with existing lifting and dumping devices.Compared with the existing working mode of bucket garbage truck, the design of this organization can reduce the working intensity of sanitation workers to a certain extent, and also shorten the cycle of garbage collection.
Keyword:Hanging bucket garbage truck; ranging and positioning; automatic loading and unloading; hydraulic drive; Robotic arm
目 录
目 录 1
第 1 章 绪论 1
1.1 前言 1
1.2 国内外研究现状 1
1.3 本设计基本参数 3
第 2 章 总布置方案设计 4
2.1 技术路线 4
2.2 提升倾倒机构的调整 4
2.3 机构布置 5
2.4 机械臂动作设计 6
第 3 章 机械臂设计 7
3.1 夹持机构设计 7
3.1.1 参数选取 7
3.1.2 设计要求验证 9
3.1.3 液压马达和减速机选型 9
3.1.4 夹紧控制 10
3.2 伸缩支撑臂设计 10
3.3 旋转辅助件设计 11
第 4 章 液压系统设计计算 13
4.1 液压泵的选择 13
4.2 液压缸选型 14
4.2.1 伸缩液压缸 15
4.2.2 旋转液压缸 16
4.2.3 升降液压缸 16
4.3 拟定液压系统原理图 17
第 5 章 结构建模与仿真 19
5.1 结构建模 19
5.2 ANSYS仿真分析 20
5.2.1 模型导入与预处理 20
5.2.2 模型受力状态设定 22
5.2.3 模型的求解与分析 23
第 6 章 垃圾桶捕捉装置控制系统方案设计 26
6.1 超声波测距 26
6.1.1 测距技术 26
6.1.2 超声波测距方法 27
6.2 图像处理定位 28
6.3 控制系统方案设计 29
结论与展望 31
参考文献 32
致谢 33
绪论
前言
随着经济的进步、社会的发展、人口的增长,生活垃圾日益增多,垃圾处理的形势变得日益严峻起来。环卫工作与我们的日常生活息息相关,垃圾的高效、清洁的运输是其中重要的一部分,因此一种高效、清洁的垃圾车是必不可少的。
 随着垃圾处理工作的日益频繁,现在对收集与运输工具提出了越来越高的要求,运输工具的高效、便捷成为了决定它能否被广泛采用的因素之一。本课题所研究的对象的载体就是一种目前被广泛采用的的垃圾收集与运输工具——挂桶式垃圾车(如图1.1)。在此基础上,我们希望可以将挂桶式垃圾车设计的更加高效、清洁。本课题研究的对象——轻型环卫车垃圾桶自动捕捉装卸机构,装卸机构是环卫车完成其多种功能的重要部分,作为核心功能部件,对其进行研究和优化具有十分突出的现实意义;垃圾桶的自动捕捉可以大大提升垃圾处理工作的效率,帮助环卫车高效准确的完成垃圾桶装卸。
随着垃圾处理工作的日益频繁,现在对收集与运输工具提出了越来越高的要求,运输工具的高效、便捷成为了决定它能否被广泛采用的因素之一。本课题所研究的对象的载体就是一种目前被广泛采用的的垃圾收集与运输工具——挂桶式垃圾车(如图1.1)。在此基础上,我们希望可以将挂桶式垃圾车设计的更加高效、清洁。本课题研究的对象——轻型环卫车垃圾桶自动捕捉装卸机构,装卸机构是环卫车完成其多种功能的重要部分,作为核心功能部件,对其进行研究和优化具有十分突出的现实意义;垃圾桶的自动捕捉可以大大提升垃圾处理工作的效率,帮助环卫车高效准确的完成垃圾桶装卸。
图1.1 挂桶式垃圾车
国内外研究现状
环卫车主要有压缩式垃圾车、挂桶式垃圾车(自装卸式垃圾车)、摆臂式垃圾车、拉臂式垃圾车、密封自卸式垃圾车(密封式垃圾车)以及对接式垃圾车。

 在国外发达的国家,垃圾车的机械自动化程度很高。对于与本课题同类型的垃圾处理,即垃圾桶垃圾处理,在美国,家家户户门前都会整齐的放置着垃圾桶,这种垃圾车非常明显的一个特点就是车身侧面的叉臂,环卫车司机只需准确的控制好侧面的叉臂,就可以通过它将垃圾箱举起,将垃圾倒入环卫车车厢内,然后将空桶放置到地面上。整个垃圾桶垃圾的倾倒过程不到一几分钟,这样的倒垃圾设计,不仅速度快,而且节省了人力物力(如图1.2)。在其他国家,有的垃圾车的前部会放置着一个大的垃圾桶,当处理路边垃圾的时候,在车头处就会伸出一个手臂将垃圾先倒在前置的垃圾桶里,当前置垃圾桶内装满垃圾时,再将前置的垃圾桶一并举起倒入垃圾仓中(如图1.3)。
在国外发达的国家,垃圾车的机械自动化程度很高。对于与本课题同类型的垃圾处理,即垃圾桶垃圾处理,在美国,家家户户门前都会整齐的放置着垃圾桶,这种垃圾车非常明显的一个特点就是车身侧面的叉臂,环卫车司机只需准确的控制好侧面的叉臂,就可以通过它将垃圾箱举起,将垃圾倒入环卫车车厢内,然后将空桶放置到地面上。整个垃圾桶垃圾的倾倒过程不到一几分钟,这样的倒垃圾设计,不仅速度快,而且节省了人力物力(如图1.2)。在其他国家,有的垃圾车的前部会放置着一个大的垃圾桶,当处理路边垃圾的时候,在车头处就会伸出一个手臂将垃圾先倒在前置的垃圾桶里,当前置垃圾桶内装满垃圾时,再将前置的垃圾桶一并举起倒入垃圾仓中(如图1.3)。
图1.2 国外侧面叉臂垃圾车 图1.3 国外前置垃圾桶垃圾车
 我国的挂桶式垃圾车装载垃圾需要依靠垃圾桶提升倾倒装置,目前,市面上的提升倾倒装置有很多种类型、规格,比较主要的两种方式,一种是依靠安装在垃圾箱顶部的液压缸同时实现提升和反转倾倒,还有一种通过链条来实现对垃圾桶的提升,再通过液压油缸来实现对垃圾桶的翻转。这样挂桶式垃圾车就可以实现将多处垃圾箱内的垃圾收入车厢,并到目的地一次性自卸出来,具有全密封,自装自卸功能,液压操作。但将垃圾桶挂上和取下提升装置的过程需要依赖人工(如图1.4)。
我国的挂桶式垃圾车装载垃圾需要依靠垃圾桶提升倾倒装置,目前,市面上的提升倾倒装置有很多种类型、规格,比较主要的两种方式,一种是依靠安装在垃圾箱顶部的液压缸同时实现提升和反转倾倒,还有一种通过链条来实现对垃圾桶的提升,再通过液压油缸来实现对垃圾桶的翻转。这样挂桶式垃圾车就可以实现将多处垃圾箱内的垃圾收入车厢,并到目的地一次性自卸出来,具有全密封,自装自卸功能,液压操作。但将垃圾桶挂上和取下提升装置的过程需要依赖人工(如图1.4)。
图1.4 人工挂桶和取桶
在我国,从垃圾车发展历程来看,尽管在我们在技术上逐渐有了很大的突破和进步,但是还有很大的一个缺陷在于,在节约人力劳动方面仍显得相当不足。需要依赖人工将垃圾桶挂上可取下,我们常常看到,坐在车上的环卫工人需要在车辆停稳后下车将垃圾桶推到提升机构附近然后将它挂上,等待垃圾桶倾倒完成后,再将其取下,归置原位,再回到车上前往下一个待清理地点。前面介绍的国外的前卸式和侧装卸式垃圾车具有机械化、自动化程度高的优点,而且环卫车司机一个人就可以完成操作,只需要在驾驶室拨动操纵杆就能完成垃圾的清运过程。而目前我国现在广泛使用的垃圾车暂时还没有使用这样的技术,大部分的垃圾车都需要人工完成装卸过程。
从国外的垃圾车发展史和国内目前的垃圾车发展现状来看,我国垃圾车未来的发展将是朝着机械化、自动化及智能化方向发展。
本设计基本参数
根据毕业设计任务书,本设计的车辆基本参数如表1.1。
表1.1 车辆基本参数
整车 | 整备质量 | 4365kg |
总质量 | 6495kg | |
轴荷 | 2595/3900 kg | |
轴距 | 3300 mm | |
轮距(前/后) | 1506/1466 mm | |
悬架形式(前/后) | 钢板弹簧非独立悬架(6片)/钢板弹簧非独立悬架(8 4片) | |
轮胎 | 7.00R16 | |
参考外形尺寸 | 5600×2000×2400 mm | |
发动机 | 4102柴油机,功率70kw | |
查挂桶式垃圾车配套垃圾桶的规格如表1.2。
表1.2 挂桶式垃圾车配套垃圾桶规格
容量 | 长(mm) | 宽(mm) | 高(mm) |
240L(挂车) | 730 | 590 | 1080 |
总布置方案设计
在设计本机构时,首先确定设计的技术路线,然后按照拟定的技术路线对机构整体进行总布置,使之合理有效,初步确定总布置方案。对环卫车原有的提升倾倒机构和箱体需要配合机构的布置做一些调整,然后将机构布置在环卫车上。最后,根据总布置方案设计机构的主体机械臂的动作。
技术路线
根据环卫车收集垃圾桶中垃圾废物过程,将挂桶式垃圾车的工作过程主要分为以下三个部分:分别为搬运挂桶、提升倾倒和卸下归位。其中提升倾倒过程依靠提升机构和翻桶倾倒机构,另外两个部分目前都依赖于人工。本设计的技术方案是保持原有的提升机构和翻桶倾倒机构实现提升倾倒过程不变,仅在布置时改变其布置结构,设计的机构取代装卸过程的人工部分进行优化。为了提升其工作效率,所设计的是一种装卸机械手,由执行系统,驱动系统和控制系统组成,其组成示意图如图2.1所示。
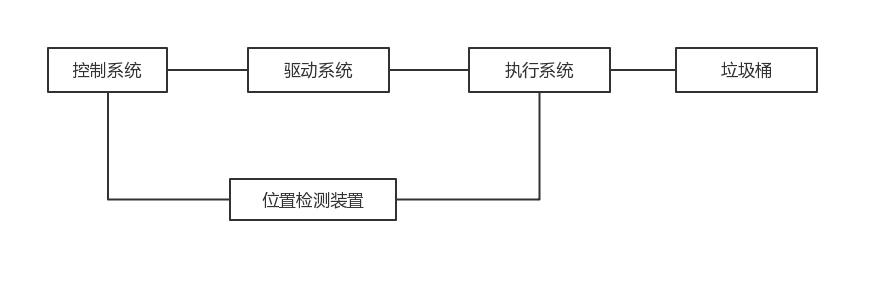 图2.1 机械手总体形式简图
图2.1 机械手总体形式简图
根据其组成和动作特点,超声波定位精度较高,足够应用于该机构,且相较于其他定位方式价格便宜,故位置检测装置采用超声波定位;机械手具有动作灵活、运动惯性小、能够接受指令,精确地定位到三维(或二维)空间上的某一点进行作业的优点,故执行系统采用机械手;液压驱动具有布局安置灵活方便,工作平稳,快速性好,易于实现往复直线运动的优点,驱动方式选择液压驱动。
提升倾倒机构的调整
本设计在设计时不改变原有的提升倾倒原理,考虑到目前市场上有不同种类、不同原理的、不同厂家生产的提升倾倒机构,所以本设计在进行整体布置时仅对原有的提升倾倒机构做细微布置上的改动,不改变市面上各种提升倾倒机构的原理。
于是,本机构对提升倾倒机构的设计加工提出如下要求:
(1)本自动捕捉装卸机构在布置时是从提升倾倒机构内伸出和缩回的,为保证本机构与提升倾倒机构不发生干涉,故将提升倾倒机构的液压缸、链条等部件设计布置在两侧。
(2)由于夹持机构在行驶过程中是缩回到提升倾倒机构内侧,保持在张开状态,此时夹持机构的最大宽度在夹持爪,宽度预计达到850mm,所以,提升倾倒机构的两侧的内侧距离应加宽至900mm以上。
(3)夹持机构有一定高度,同时又要保证能够夹持到垃圾桶,提升倾倒机构的垃圾桶挂桶小支架与下方留有550mm的距离来布置本机构。
机构布置
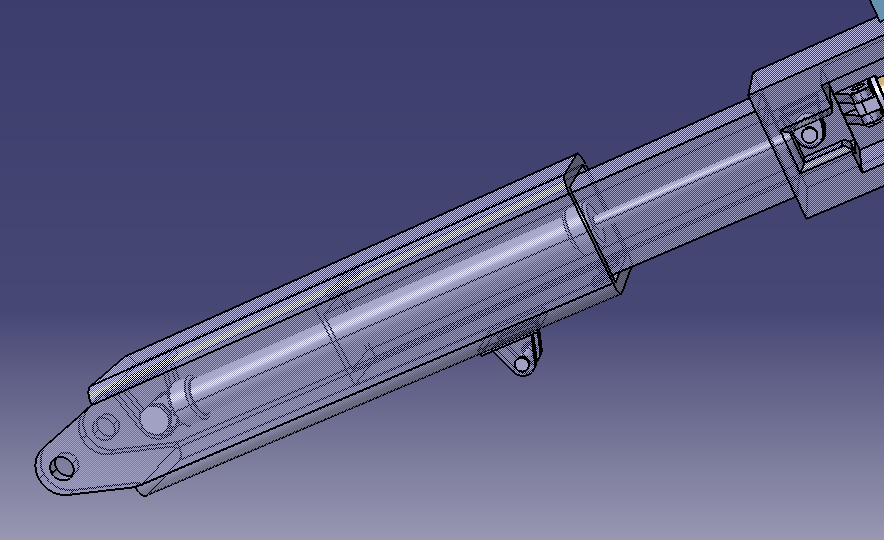
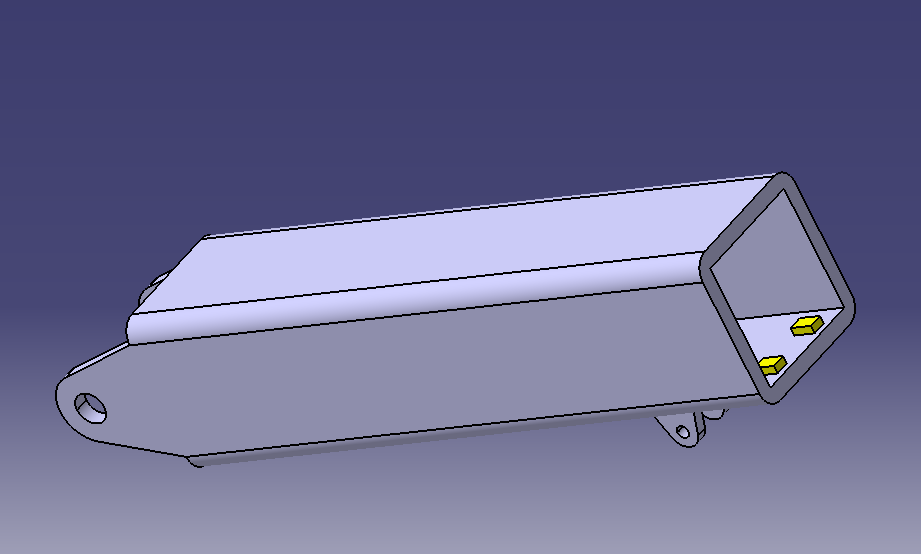
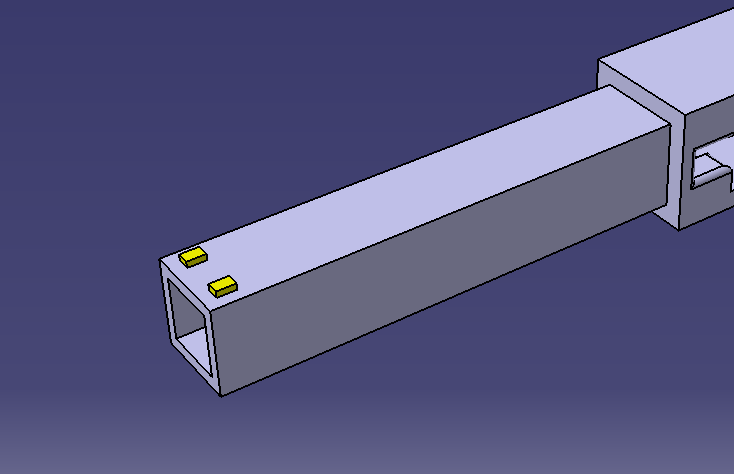
 提升倾倒机构经过以上调整后,本机构的布置就变得简单了。将设计的夹持机构、旋转机构和伸缩机构装配完成后,通过伸缩支撑臂的外梁后端和升降液压缸的耳环将整体固定在一支座上,支座与车架固定在一起。机构的布置图如图2.2和2.3所示。
提升倾倒机构经过以上调整后,本机构的布置就变得简单了。将设计的夹持机构、旋转机构和伸缩机构装配完成后,通过伸缩支撑臂的外梁后端和升降液压缸的耳环将整体固定在一支座上,支座与车架固定在一起。机构的布置图如图2.2和2.3所示。
图2.2 机构在环卫车上的布置图
 图2.3 机构在环卫车上的布置俯视图
图2.3 机构在环卫车上的布置俯视图
机械臂动作设计
根据总布置方案设计机构的主体机械臂的动作。一个清运周期内机械臂的动作可以分为两部分——搬运挂桶和卸下归位。
搬运挂桶的动作流程为:伸长并旋转到目标位置—gt;夹紧—gt;抬起—gt;旋转回正—gt;收至挂桶机构—gt;下降挂桶—gt;松开—gt;全部收回;卸下归位的动作流程为:伸至挂桶机构—gt;夹紧—gt;升起卸桶—gt;伸长—gt;下降放桶—gt;松开—gt;全部收回。
机械臂设计
在轻型环卫车垃圾桶自动捕捉装卸机构中,机械臂是其关键的一部分。机械臂的动作实现依靠液压系统,所以机械臂与液压系统的设计是相互对应的。在整套机构中,机械臂需要实现的功能及设计要求有:夹紧和松开垃圾桶;夹回和送出垃圾桶;微抬和放下垃圾桶;在垃圾桶提升、倾倒过程以及环卫车行车过程中机械臂不伸出车身侧面。
将机械臂按照其功能划分为夹持机构、伸缩支撑臂和旋转机构。根据以上待实现的功能和设计要求,设计机械臂的这三个部分。
夹持机构设计
夹持机构的功能作用:夹紧和松开垃圾桶。
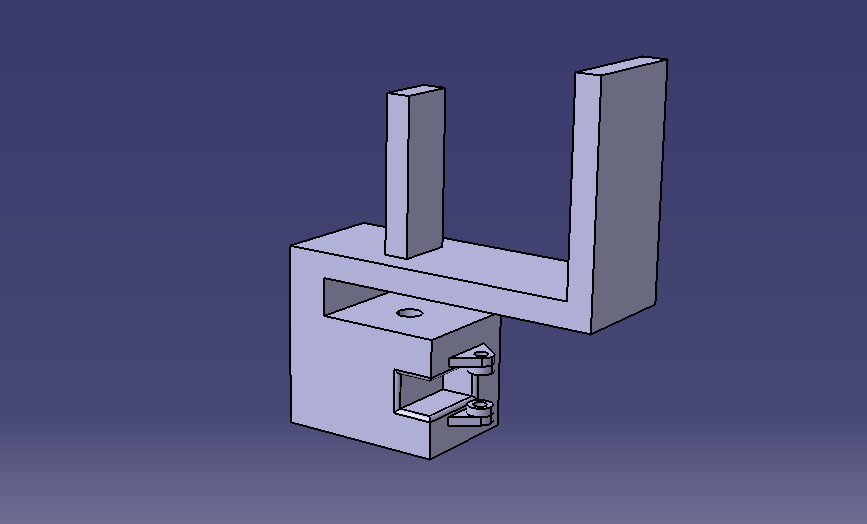
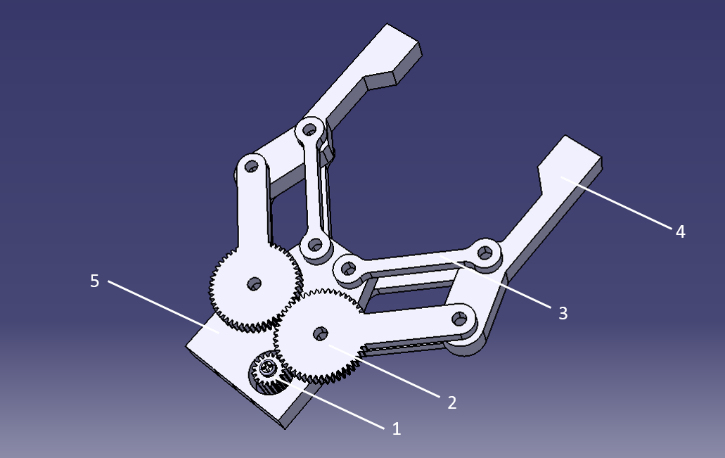 由表1.2挂桶式垃圾车配套垃圾桶规格知,240L挂车垃圾桶的尺寸为730mm*590mm*1080mm,夹持爪动作的实现拟设计一种铰链四杆机构,相对的两杆平行且长度相等,即平行四边形机构,也是一种双曲柄机构。原动件以齿轮传动的方式输入,夹持杆为从动件。夹持机构有两个爪,设计两对称的夹持爪机构。两对称的四杆机构原动件之间通过两齿轮摆上的轮齿外啮合。以液压马达带减速机驱动小齿轮旋转,小齿轮与右侧齿轮啮合带动其转动,左右侧齿轮通过外啮合转动带动两爪夹紧或松开(如图3.1)。
由表1.2挂桶式垃圾车配套垃圾桶规格知,240L挂车垃圾桶的尺寸为730mm*590mm*1080mm,夹持爪动作的实现拟设计一种铰链四杆机构,相对的两杆平行且长度相等,即平行四边形机构,也是一种双曲柄机构。原动件以齿轮传动的方式输入,夹持杆为从动件。夹持机构有两个爪,设计两对称的夹持爪机构。两对称的四杆机构原动件之间通过两齿轮摆上的轮齿外啮合。以液压马达带减速机驱动小齿轮旋转,小齿轮与右侧齿轮啮合带动其转动,左右侧齿轮通过外啮合转动带动两爪夹紧或松开(如图3.1)。
图3.1 夹持机构
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: