部分自动驾驶五座电动轮车总体设计毕业论文
2020-02-17 17:10:28
摘 要
汽车行业在经过漫长的发展史后,呈现出来的发展趋势是丰富、多元化的,在当下和未来的一段时间内,智能化驾驶和电动化将是两个十分重要的话题。智能化旨在解放人们的双手,实现无人驾驶,电动化则是使汽车摆脱对汽油、柴油等能源的依赖。
本文旨在完成加装部分自动驾驶功能的五座电动轮车的总体设计。总体设计包括汽车类型与结构的选择、汽车主要参数的选择以及电机的选择等,这部分将基于所给参考车型进行计算设计。另外本文还利用MATLAB对汽车进行了动力性校核,使其满足动力性、最大爬坡度、加速时间的要求,并且结合CARSIM完成了操纵稳定性和平顺性的仿真。最后利用CATIA进行车身外形三维建模,利用AutoCAD完成车身外形图、底盘布置图、车内部布置图和前轮跳动图的绘制。文中还提及部分自动驾驶功能的实现,即各类传感器的选择和布置。
关键词:部分自动驾驶;电动轮车;总体设计
Abstract
After a long history of development, the automotive industry presents a rich and diversified development trend. In the current and future period of time, intelligent driving and electrification will be two very important topics. Intelligence aims at liberating people's hands and realizing driverless driving. Electrification is to make cars get rid of dependence on gasoline, diesel and other energy sources.
The purpose of this paper is to complete the overall design of five-seat electric wheeled vehicle equipped with partial automatic driving function. The overall design includes the selection of the type and structure of the car, the selection of the main parameters of the car and the selection of the motor, etc. This part will be calculated and designed based on the given reference vehicle model. In addition, this paper also uses MATLAB to check the dynamic performance of the vehicle, so that it can meet the requirements of power, maximum climb, acceleration time, and completes the simulation of handling stability and ride comfort combined with CARSIM. Finally, the three-dimensional model of body shape is built by CATIA, and the drawing of body shape, chassis layout, interior layout and front wheel jump diagram is completed by AutoCAD. The realization of some automatic driving functions, i.e. the selection and arrangement of sensors, is also mentioned.
Key words: partial automatic driving; electric wheeled vehicle; overall design
目录
第1章 绪论 1
1.1 课题研究背景 1
1.2 电动轮汽车国内外研究现状 1
1.3 部分自动驾驶汽车国内外研究现状 2
1.4 总体设计的目的、意义和基本内容 2
1.4.1 总体设计的目的和意义 2
1.4.2 总体设计的基本内容 3
第2章 汽车类型结构的选择和主要参数的确定 4
2.1 汽车类型的选择 4
2.2 汽车结构形式的选择 4
2.3 汽车主要参数的确定 5
2.3.1 汽车主要尺寸的确定 5
2.3.2 汽车质量参数的确定 6
2.3.3 汽车性能参数的确定 7
第3章 电动机和轮胎的选择及电池组容量计算 14
3.1 电动机的选择 14
3.1.1 轮毂电机的介绍与选型 14
3.1.2 轮毂电机参数匹配计算与电机的选择 14
3.2 轮胎的选择 17
3.3 电池组容量设计 17
3.3.1 动力电池的介绍与选型 17
3.3.2 由续驶里程计算电池组容量 18
3.3.3 动力电池的选择 19
第4章 底盘其他主要总成的选型与布置 20
4.1 电机与电池组的布置 20
4.2 转向系统的选型和布置 20
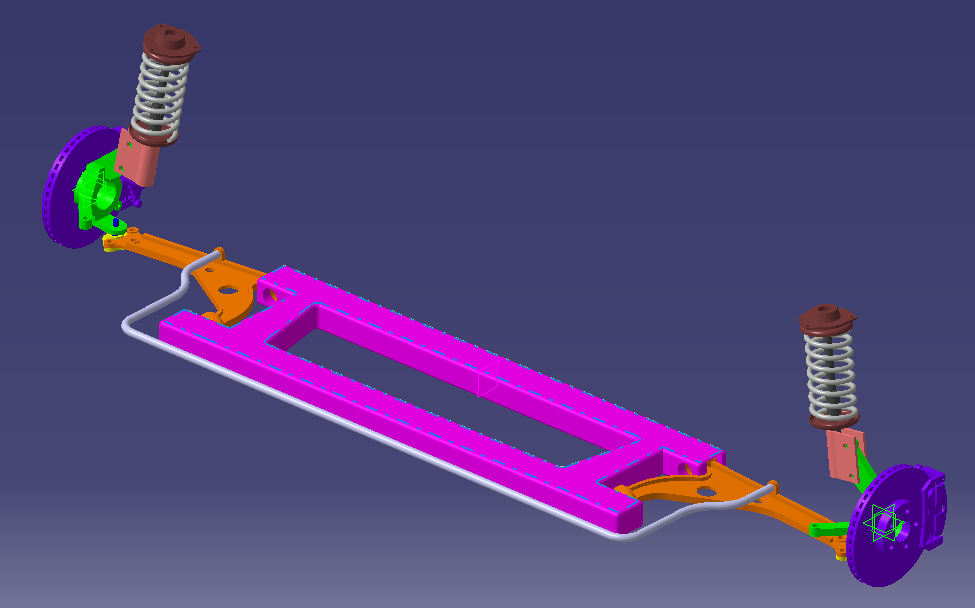
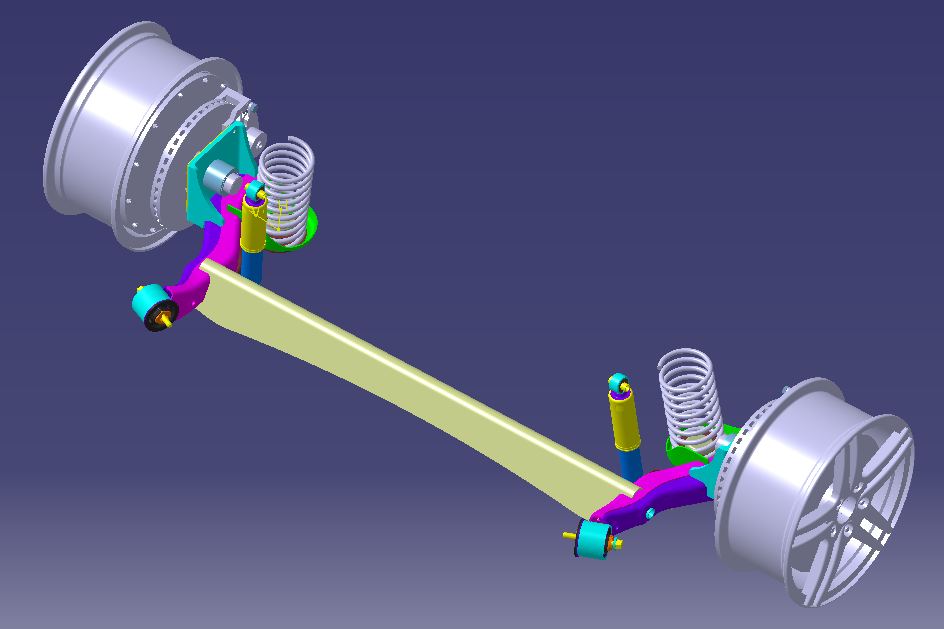
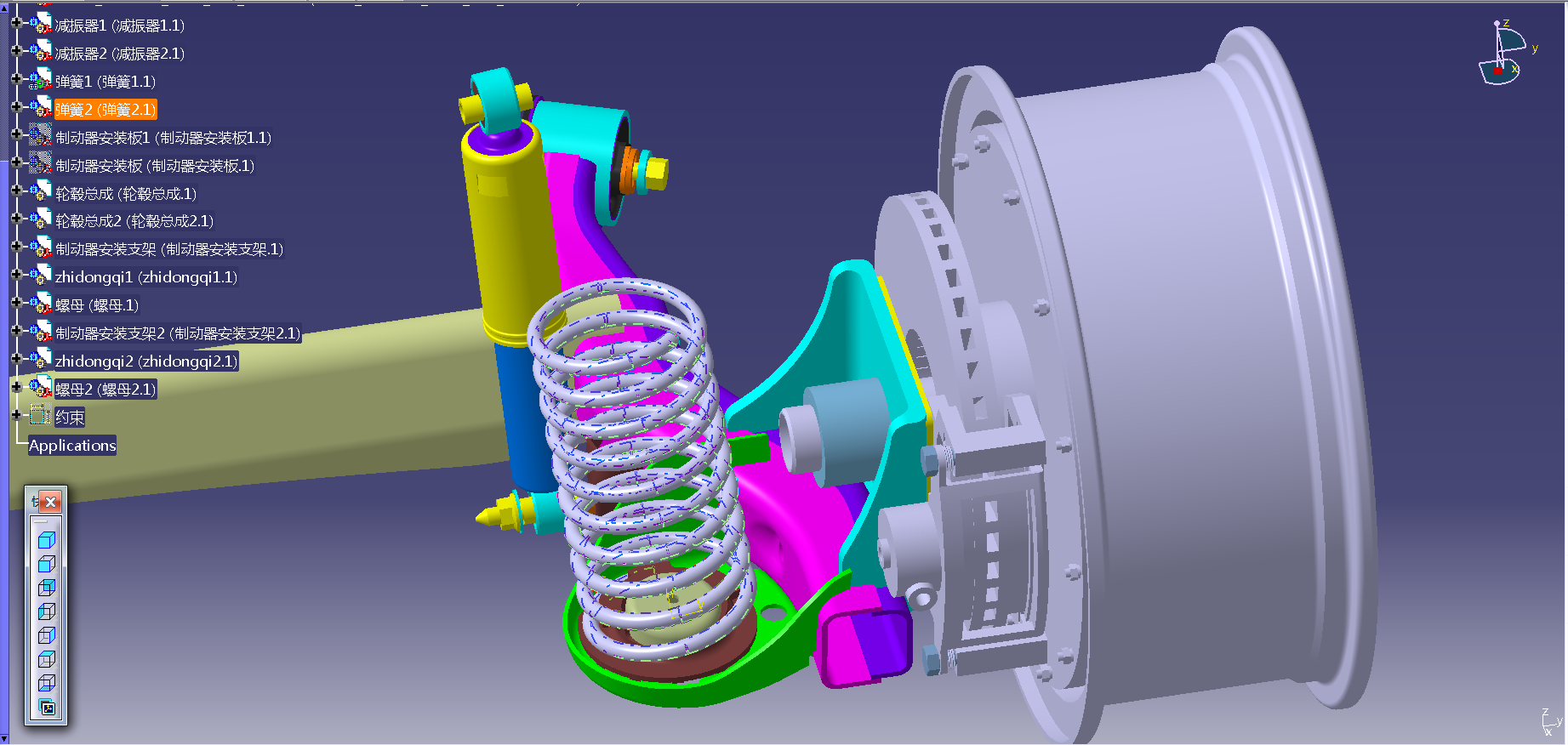
4.3 悬架系统的选型和布置 21
4.4 制动系统的选型和布置 22
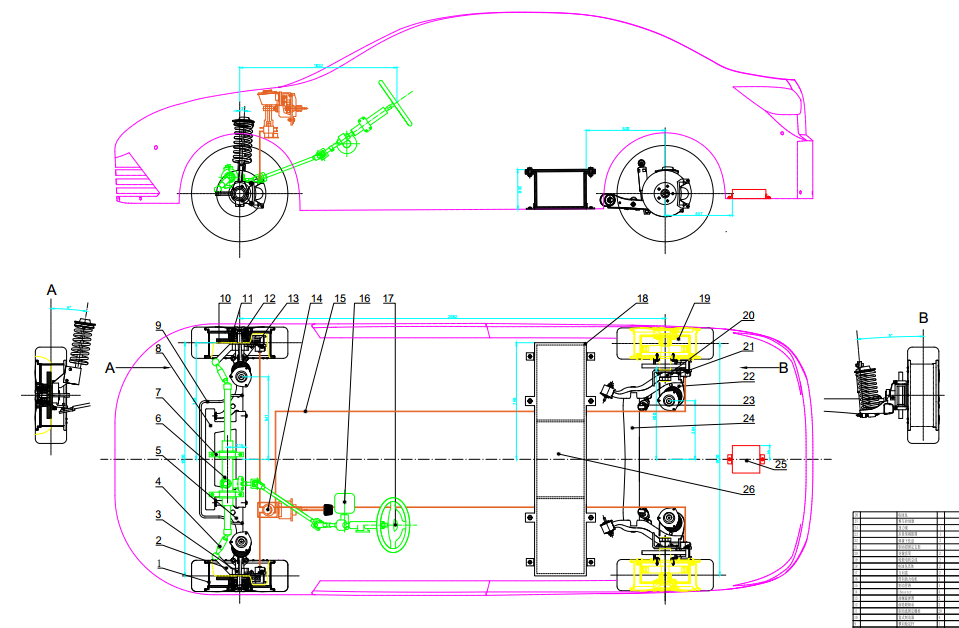
4.5 底盘布置图 23
第5章 车身外形设计与传感器的布置 24
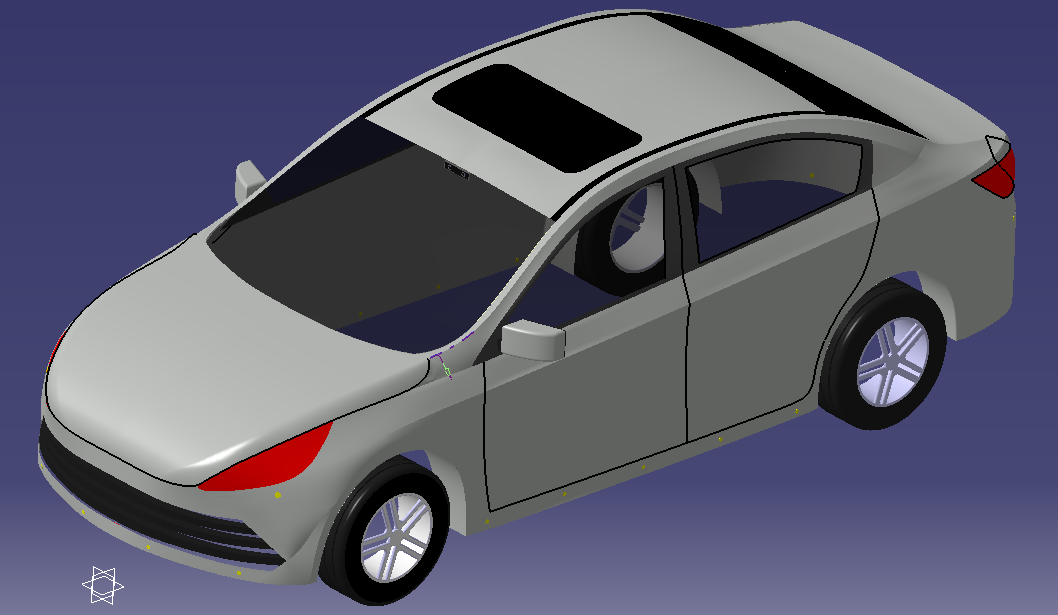
5.1 车身外形设计 24
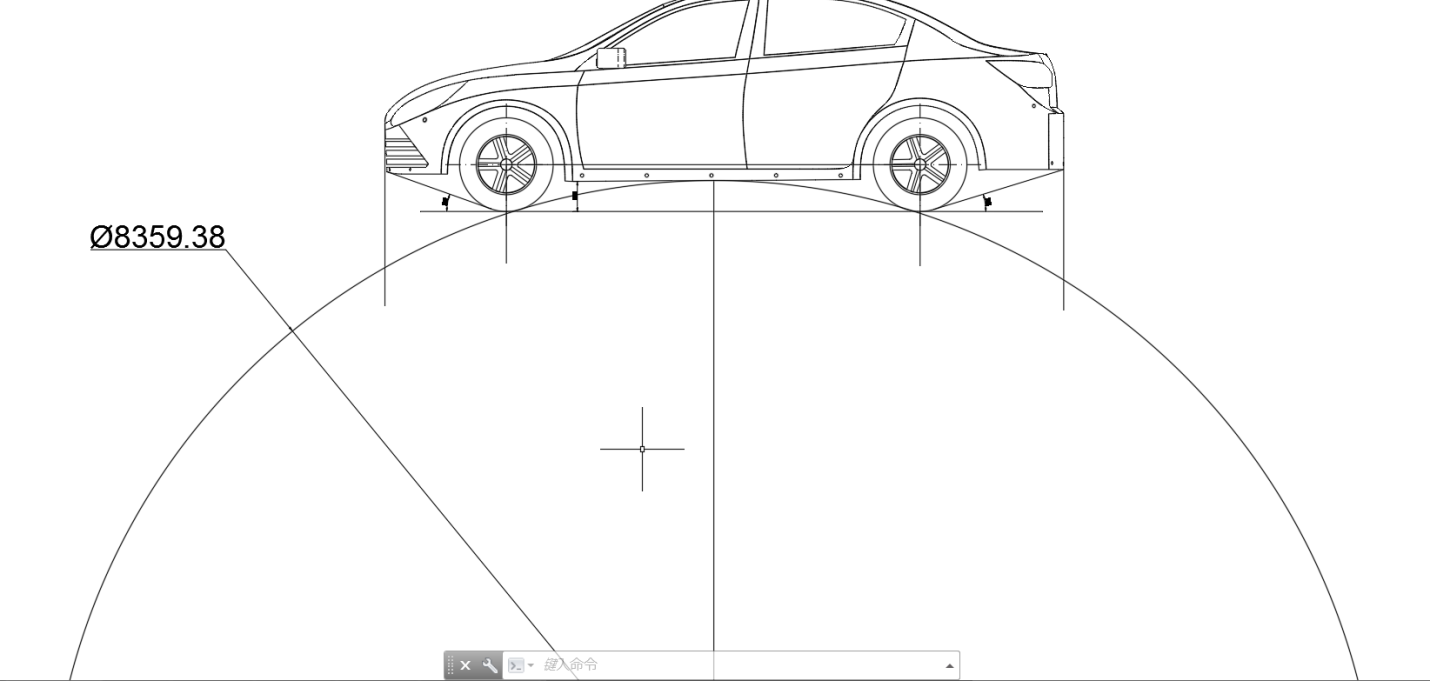
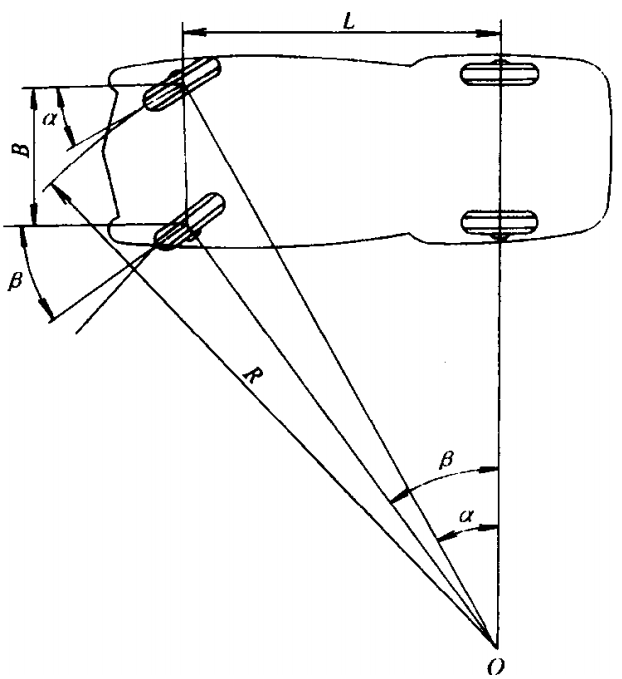
5.2 转向轮运动校核 25
5.3 车身内部布置 26
5.4 传感器的布置 27
第6章 整车性能校核和仿真 29
6.1 校核最高车速 29
6.2 校核最大爬坡度 31
6.3 校核加速时间 32
6.4 操纵稳定性仿真 35
6.5 平顺性仿真 38
第7章 总结与展望 41
参考文献 42
致谢 43
附录 44
第1章 绪论
1.1 课题研究背景
能源问题已经成为近几年来人们越来越关注并不断讨论的话题,人们在面对越来越突出的能源危机时一直不断找寻应对的方法,国家也越来越重视绿色环保的理念。回首汽车行业漫长的发展历程,汽车的发展是多元化的,为了满足人们的需求,贴合时代的标签,我们总是对汽车行业提出新的期待。面向21世纪,我们渐渐摒弃了传统的观念,内燃机汽车在能源愈发匮乏、环境愈发恶劣的今天逐渐展现出其不足之处,而与此同时,电动汽车逐渐走进人们的视线,成为新时代汽车行业引人注目的潜力股,电动汽车技术也在全球各地逐渐推广开来[1]。
自第一辆汽车诞生以来,贯穿汽车发展始终的一点就是汽车的智能化,汽车智能化就是为了便于人们驾驶,给人们带来更好的驾驶体验。智能化技术包括多个方向,在驾驶领域,其最终表现为无人驾驶技术[2]。
本文基于以上背景,提出了关于部分自动驾驶五座电动轮车的总体设计。
1.2 电动轮汽车国内外研究现状
由于石油价格的上涨和国家对排放的限制,电动汽车的发展得到极大推动[3],集中式驱动和分布式驱动是电动汽车中最主要的两种驱动形式,集中式驱动与传统内燃机汽车的差别很小,只是用电动机取代发动机,而传动系统部分几乎不变。这种集中式驱动的电动汽车技术比较成熟,较为普遍,但是其存在效率低、空间利用率低等缺陷[4]。随着技术发展,轮毂电机应运而生,它的驱动形式属于分布式,由电机直接驱动轮毂,因而具有很多优点,如传动效率高、占用空间小以及改进的车轮转矩控制[5]。
电动轮车在轮毂电机技术不断发展后展现出了其巨大的潜力,越来越多的工程师对电动轮车布置、能量管理和运动控制等进行深入研究[6],尤其是具有轮内电机的电动汽车引起了研究人员的浓厚兴趣,每个车轮都由其轮毂内的电机直接驱动,外部横摆力矩可通过两侧车轮之间的转矩差提供[7]。
保时捷在1900年生产了一款轮毂电机前轮驱动的电动汽车并展现出其种种优势所在,之后国内外各汽车行业都进行电动轮车的设计研发。日本清水浩教授的研究小组不仅开发出多种电动轮车,还在技术上取得较大突破,1991年其研究小组开发的IZA电动轮车最高车速突破176km/h。2002年至2003年期间,同济大学研发出“春晖一号”及“春晖二号”两辆燃料电池驱动的电动轮车;04年,比亚迪也发布一款锂离子电池驱动的电动轮车。此后,奇瑞汽车、吉林大学与一汽等也纷纷研发出自己的轮毂电机电动轮车[8]。
1.3 部分自动驾驶汽车国内外研究现状
对于自动驾驶汽车,我们常根据美国汽车工程师学会(SAE)的分级标准对其进行等级划分。SAE标准中将自动驾驶技术等级分为0~5级,分别是L0、L1、L2、L3、L4和L5级,它们对应的自动驾驶程度分别是:无自动驾驶、驾驶员辅助、部分自动驾驶、特定条件自动驾驶、高度自动驾驶和完全自动驾驶[9]。
我国从1980年就开始研究自动驾驶技术,我国第一辆无人车ATB-1在八五期间成功诞生,此后各高校和研究所都投入对自动驾驶汽车的研究工作之中,并收货颇丰。国防科技大学的红旗CA7460和一汽与国防科大共同开发的红旗HQ3以及军事交通学院的“军交猛狮Ⅲ号”都是我国自主研发的无人车,代表了我国自动驾驶技术的先进水平[10]。特斯拉作为无人驾驶汽车的领军人物,在2016年发布了Autopilot2.0系统,其相比于Autopilot1.0来说,增加了车身周围的摄像头和传感器布置,并对雷达进行增强,能够实现L3级别的自动驾驶,而明年即将推出的Autopilot3.0系统,其运算速度可达2.0系统的40倍,这样我们便可离无人驾驶更近一步。
随着自动驾驶技术变得更加成熟,人们不仅仅满足于其安全性或一些基本功能,而是对驾驶、乘坐舒适性和控制效率提出了更高的要求[11],相信未来自动驾驶汽车会不断发展,给人们带来全新的驾驶体验。
1.4 总体设计的目的、意义和基本内容
1.4.1 总体设计的目的和意义
何谓总体设计,即于汽车产品开发之前所做的总体性设计,例如各结构总成的选型和汽车各项参数的确定工作,其应统领汽车设计的全过程,并对各项设计工作提出总体要求。总体设计扮演的角色更像是起到一个引导和约束的作用,没有一个总体设计,其他相关工作便难以进行,这就是其意义所在。
本次毕业设计旨在完成加装部分自动驾驶功能的五座电动轮车的总体设计,目的主要包括以下几点:
(1)完成汽车类型与各结构总成的选型工作。
(2)完成汽车各主要参数(尺寸参数、质量参数和性能参数)的确定。
(3)完成相关运动学校核,保证汽车的正确运动。
(4)实现各零部件之间的合理装配关系,也就是我们熟知的总布置设计或者说总布置图。
(5)完成整车的性能仿真和校核。
1.4.2 总体设计的基本内容
总体设计的基本内容为任务书上提出的设计要求,也就是需要完成以下几点:
(1)根据设计原则以及汽车相关法规和标准,分析和确定部分自动驾驶五座电动轮车的总体设计方案;
(2)确定整车主要技术参数;
(3)进行整车设计计算并分析其动力性、续驶里程、制动性、操纵稳定性和行驶平顺性等性能;
(4)根据部分自动驾驶的性能要求确定其部分自动驾驶功能如何实现;
(5)确定底盘各主要总成的结构型式和布置方案;
(6)车身造型设计;
(7)绘制相应图纸,包括底盘布置图、车身外形图、车内部布置图和底盘主要总成运动校核图。
以上需要完成的设计任务需基于所给参考车型骏派A70E的整车参数来进行设计,由表1.1给出。
表1.1整车参数
参数名称 | 值 | 单位 |
长/宽/高 | 4610/1790/1500 | mm |
轴距 | 2652 | mm |
轮距(前/后) | 1530/1520 | mm |
整备质量 | 1450 | kg |
满载总质量 | 1800 | kg |
最高车速 | 140 | km/h |
最大爬坡度 | 30 | % |
续驶里程 | gt;280(60km/h等速) | km |
此表即为本次设计车型的参考参数,具体参数在后文第4章中会详细确定,初步预计出汽车总质量外,其他参数将不会有太大改变。
第2章 汽车类型结构的选择和主要参数的确定
2.1 汽车类型的选择
汽车的类型多种多样,分类方法也各式各样,例如以发动机排量、汽车质量、汽车总长等作为指标。本文将根据国家标准GB/T15089-2001《机动车辆及挂车分类》所提供的分类依据对目标汽车进行类型确定。
目标车型以骏派A70E为参考车型进行设计,其为五座的四轮纯电动载客汽车,故将汽车类型定为M类,再根据座位数5来确定汽车类型为类。
2.2 汽车结构形式的选择
(1)轴数
轴数的选择原则主要是汽车的总质量,针对不同质量的车型,轴数不尽相同,常见的为两轴、三轴、四轴等。之所以选择不同的轴数是考虑到道路的承载能力,当汽车的总质量很大时,若选择两根轴来支撑,那么每根轴的负荷就会相当大,当这种负荷超过了道路的承载能力,就会导致道路被破坏。所以轴数的选择十分重要,要根据设计车型的总质量来合理选择。本文设计车型质量为满载1800kg,属于常规车型,因此轴数选为两轴形式,两轴式结构简单且符合常规。
(2)驱动形式
所谓驱动形式,就是指汽车有几个车轮,有几个驱动轮。常见的汽车驱动形式有4×2、4×4、6×2、6×4等,前后两个数字所代表的意思分别为车轮数和驱动轮数。驱动形式的选择不是随心所欲,必须考虑到汽车的用途以及汽车总质量等多种因素,有时还需分析车辆的通过性能,由于本车为常规车型,车轮数选为4个。对于驱动轮的数目选择,要考虑这样几个方面,比如汽车的通过能力,汽车的制造成本等。本车属于中小型车辆,对性能要求不高,如果采用四轮驱动,不仅结构十分复杂而且成本因素也需要衡量。结构复杂体现在电子差速上,因为本车是轮毂电机驱动,不采用传统的机械差速器,采用电子差速来实现车轮差速效果,如果采用四轮驱动,则会使得电子差速变得十分复杂。综上所述,本车采用两轮驱动,由于前部需要放置转向系统,所以轮毂电机布置在后轮,驱动形式定为4×2后轮驱动。
(3)布置形式
对于传统的内燃机汽车,布置形式主要有三种,也就是根据发动机和驱动桥的布置位置来进行区别。但是本车为轮毂电机驱动的电动汽车,为分布式驱动,没有传统汽车的发动机、离合器、变速器等,布置形式采用将轮毂电机布置在后轮中的方法,实现电机对车轮的直接驱动作用,再通过电子控制器实现车速的控制和电子差速。
2.3 汽车主要参数的确定
2.3.1 汽车主要尺寸的确定
本车以骏派A70E为参考车型,主要尺寸参考其所给尺寸来确定,初步确定主要尺寸如下:
(1)外廓尺寸
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: