无人物流车安全防撞系统开发毕业论文
2020-02-17 12:48:58
摘 要
随着社会的进步、电商行业在快速发展。这推动着仓储物流行业快速发展。传统的仓储模式无法满足电商行业的新需要。国内外许多物流企业和个人都在尝试在仓库中用AGV取代人的办法来建立新的仓储模式。
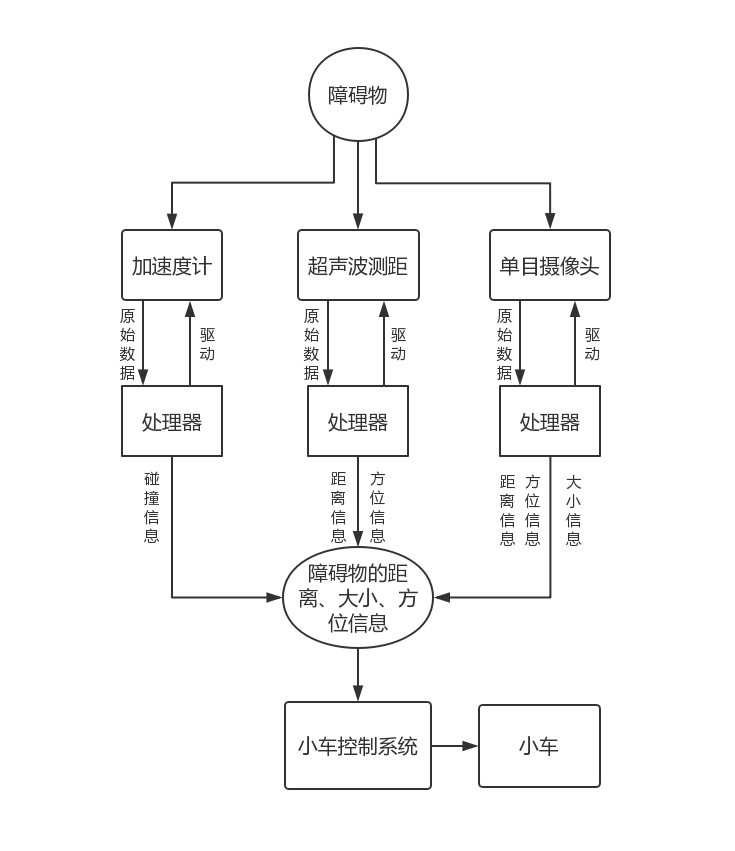
本文设计了一种基于超声波与单目摄像头测距的无人物流车安全防撞系统。该系统使用加速度计来感知碰撞,超声波测距来实现距离报警,机器视觉摄像头来获知障碍物的距离、宽度、角度信息。加速度计和超声波测距模块具体的算法为:首先获取数据;数据滤波;最后数据处理获得障碍物的信息。单目摄像头的障碍物检测算法为:首先使用摄像头获取外界信息,将包含外界信息的图像数据传给微型电脑进行处理。微型电脑对图像进行滤波处理以降低噪声,然后找出障碍物的轮廓,最后进行距离、大小和方位的计算。
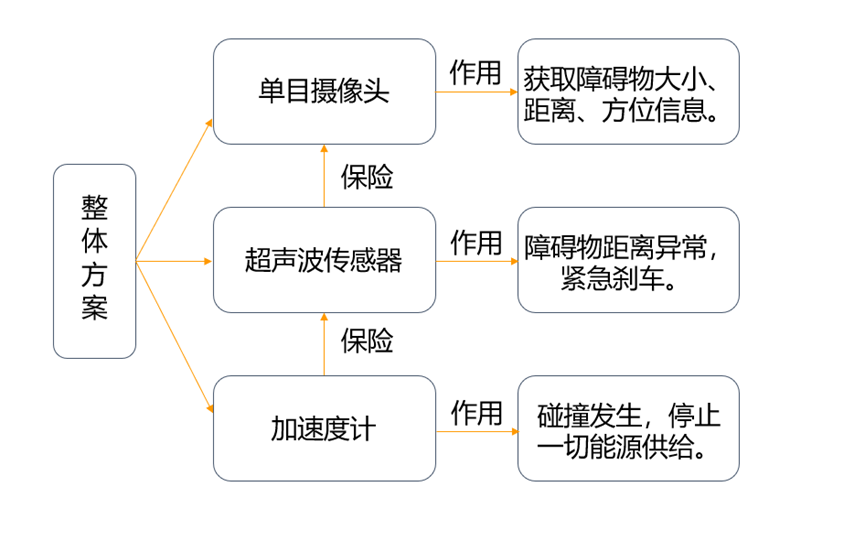
本文的特色在于使用了多种传感器。加速度计、超声波测距模块和单目机器视觉共同获取外界信息。超声波测距模块是机器视觉测距模块的保险。在机器视觉失效时,通过超声波测距,小车能获取基础的外界信息。加速度计则是在另外两种传感器都失灵,碰撞已经发生时,为小车提供碰撞信息,防止小车二次损坏。
关键词:加速度计;超声波测距;机器视觉;单目摄像头;AGV
Abstract
With the advancement of society, the e-commerce industry is developing rapidly. This promotes the rapid development of the warehousing and logistics industry. The traditional warehousing model cannot meet the new needs of the e-commerce industry. Many logistics companies and individuals at home and abroad are trying to use the AGV to replace people in the warehouse to establish a new warehousing model.
This paper designs a safety collision avoidance system for unmanned logistics vehicles based on ultrasonic and monocular camera ranging. The system uses an accelerometer to sense collisions, ultrasonic ranging to achieve distance alarms, and a machine vision camera to know the distance, width, and angle information of obstacles. The specific algorithms of the accelerometer and the ultrasonic ranging module are: first acquiring data; data filtering; and finally data processing to obtain obstacle information. The obstacle detection algorithm of the monocular camera is: first, the external information is acquired by using the camera, and the image data containing the external information is transmitted to the microcomputer for processing. The microcomputer filters the image to reduce noise, then finds the contour of the obstacle, and finally calculates the distance, size, and orientation.
This article features a variety of sensors. The accelerometer, the ultrasonic ranging module and the monocular machine vision jointly acquire external information. The ultrasonic ranging module is the insurance for the machine vision ranging module. In the case of machine vision failure, the car can obtain basic external information through ultrasonic ranging. Accelerometers provide crash information for the car when the other two sensors fail. When the collision has occurred, the car is prevented from being damaged twice.
Key Words:Accelerometer; ultrasonic ranging; machine vision; monocular camera; AGV
目录
第1章 绪论 1
1.1课题研究背景与意义 1
1.2国内外研究现状 1
1.2.1无人物流车研究现状 1
1.2.2障碍物识别研究现状 2
1.3研究内容与论文结构安排 5
1.3.1研究内容 5
1.3.2论文结构安排 5
第2章 安全防撞系统总体方案设计 7
2.1系统方案总体架构 7
2.2系统硬件平台 9
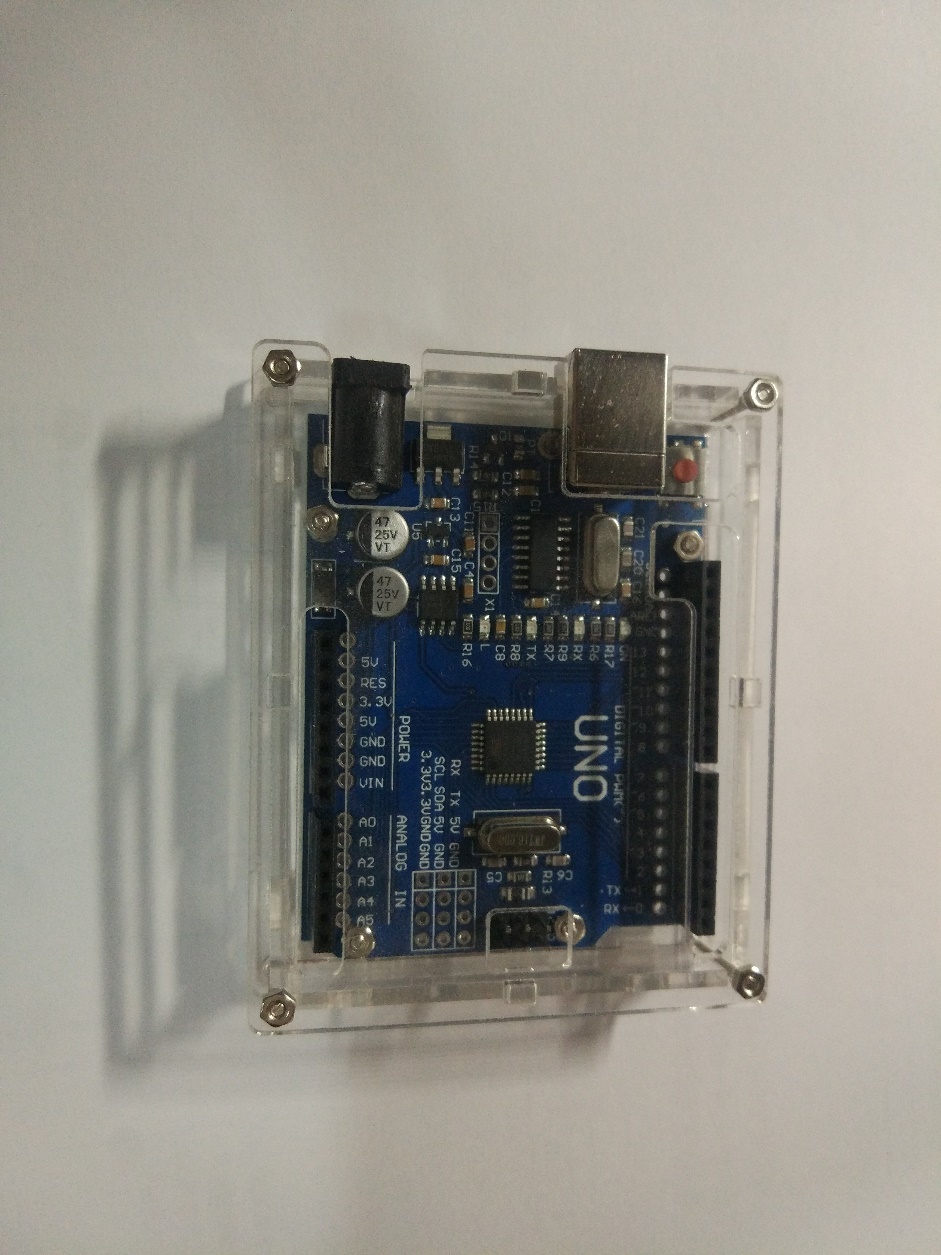
2.2.1Arduino微控制器 9
2.2.2树莓派微型电脑 10
2.3本章小结 11
第3章 加速度计模块设计 12
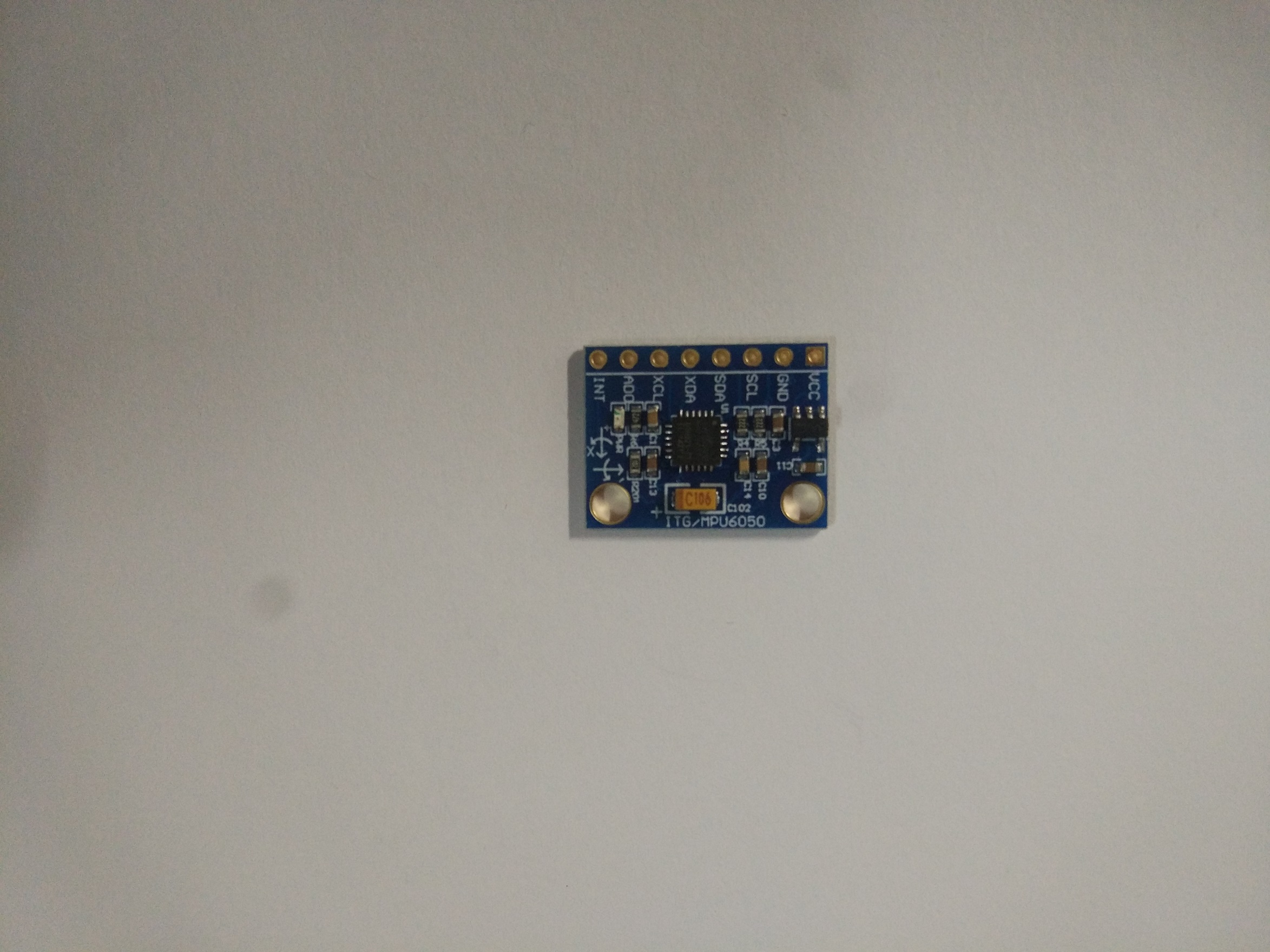
3.1加速度计模块选型 12
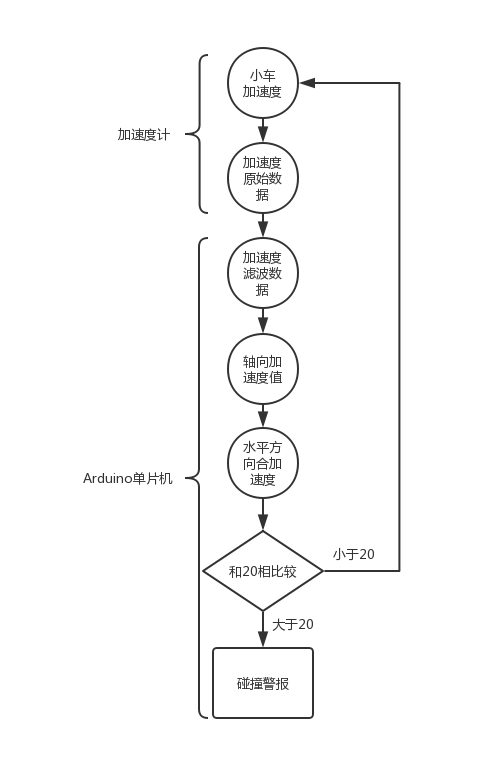
3.2算法设计与实现 13
3.3本章小结 15
第4章 超声波测距模块设计 16
4.1超声波测距模块选型 16
4.2算法设计与实现 17
4.3本章小节 19
第5章 基于单目摄像头的环境感知设计 20
5.1单目摄像头模块选型 20
5.2环境搭建 21
5.2.1树莓派之Raspbian系统烧录 21
5.2.2 Python之OpenCV环境搭建 22
5.3算法设计与实现 25
5.3.1算法概述 25
5.3.2图像获取算法 27
5.3.3图像滤波算法 27
5.3.4寻找轮廓算法 30
5.3.5几何测距算法 30
5.4本章小结 33
第6章 测试平台设计与搭建 34
6.1小车选型与组装 34
6.2实验分析 36
6.3本章小结 42
第7章 总结与展望 43
7.1总结 43
7.2展望 43
参考文献 45
致谢 47
附录A 48
附录B 53
附录C 56
第1章 绪论
1.1课题研究背景与意义
仓储活动或者说仓储的基本功能包括了物品的进出、库存、分拣、包装、配送及其信息处理等六个方面。传统的仓储活动基本是靠人工进行的,人工卸货装货、人工把货物整理入库、人工分拣与包装、再由人开车配送、甚至信息处理这块也是由人工来完成的。传统的仓储活动有计算机的参与,但实现的功能比较少,仅仅在信息处理这块发挥了一定作用。随着社会的发展、电商经济的崛起,仓储物流这一块也在快速发展。传统的仓储物流模式在货物量较少的情况下,运行起来还是得心应手的;但电商经济的发展带来了仓储物流需要处理的货物数量的井喷式增长。尤其是在一些特殊的节日,如美国等国家的“黑色星期五(圣诞大采购)”、中国由阿里巴巴等企业带起来的“双十一光棍节”、由京东等企业带起来的“京东618”等。在这些特殊的节日里,电商卖家大力促销,买家也是疯狂买货,交易金额经常是上百亿至千亿人民币的水平(据Adobe Analytics数据2018年黑色星期五当日在线销售额62.2亿美元;2018年天猫双十一全天交易额2135亿人民币;而2018年6月1日0点至6月18日24点京东全球年中购物节累计下单金额达1592亿),而货物的交易数量也是上亿的数量级。对于如此巨大的货物量,大企业处理也是很棘手,时常能听到某些仓库爆仓的新闻。
传统的仓储模式已经无法满足电商行业的需要,需要有一种新的、更高效的、处理能力更强的仓储模式来解决这一需要。许多企业和个人都尝试在仓库中用AGV取代人的办法来建立新的仓储模式。
1.2国内外研究现状
1.2.1无人物流车研究现状
最早实际应用的仓储物流机器人应该是亚马逊的Kiva机器人。从2012年开始,Kiva机器人就在亚马逊的仓库中使用了。该机器人系统的模式是“货架到人”的物流模式,具体来说是不用拣选人员,然后直接把货架运输到复核包装的人员面前,再由复核包装人员完成拣选、打包复核工作,把人员数量压到最低的一种模式。通过巡航定位技术、动力补充技术、通讯联系技术、软件系统相关技术等技术,Kiva机器人基本实现了无人监管[1]。
简单来说.Kiva机器人以及相关数据系统将业马逊的物流配送中心变成了一整套灵活的、富有生命的仓储系统。。
除了仓库里面的仓储机器人,亚马逊有一款送货机器人: Scout。目前该机器人在华盛顿州的斯诺霍米什县测试。从周一到周五,有6个Scout机器人在一名亚马逊员工的陪同下进行送货。巡航速度相当于步行。
国内也是有许多企业在这物流机器人方面下了苦工的,如阿里巴巴旗下的菜鸟网络的无人送货机器人菜鸟小G、菜鸟小G2代、菜鸟小G plus等。这些机器人能实现动态识别、障碍物避让以及短途配送等功能[2]。
阿里巴巴还有一个“曹操”仓储机器人,该机器人应用于配送仓库中。机器人接到订单后,会迅速查出商品在仓库的位置,并且筛选最优路径拣货。拣完货后机器人会把货物送到打包台。这样可以减少仓管人员的走路的距离,大大提高仓库分拣打包的效率。
京东也有自己的物流机器人。京东集团自主研发的无人配送车已经进入道路测试阶段。京东的配送车车顶有多个激光雷达,车身四周都有摄像头来检测障碍物。该车最高速度10km/h,单次充电可行驶50km以上。该车在快到客户地址附近时,会给客户发送短信。之后当车到达后,客户通过人脸识别或者短信验证码就可以拿走货物。
京东也有自己的仓储机器人。相对于亚马逊和阿里巴巴,京东的仓储机器人系统的功能更多。有货架穿梭车、搬运机器人和分拣机器人等。京东的AGV搬运机器人和亚马逊的Kiva差不多。京东的AGV搬运机器人通过地上贴的二维码来进行定位与导航。
除了上面的亚马逊、阿里巴巴、京东等大型电商公司,还有许多专门做机器人的公司参与无人物流车的研发。如木蚁机器人公司的Mooe-Core导航机器人系统。使用该系统的机器人拥有激光定位系统和很强的规划路线的能力,不需要铺设额外的设备,就能在短时间内学习工作环境。之后就能在有行人和机器人的环境下实现货物的运输任务。还有南江机器人公司仓储机器人。该公司的机器人使用二维码定位导航技术,拥有自动举升、自动搬运等功能,并且实现了多机器人的调度。该机器人内置自主算法来工作。
1.2.2障碍物识别研究现状
障碍物识别流程主要包括:包含障碍物信息的数据的获取;数据的处理:获得障碍物信息;障碍物信息的输出:将信息传给上位机做出决策。
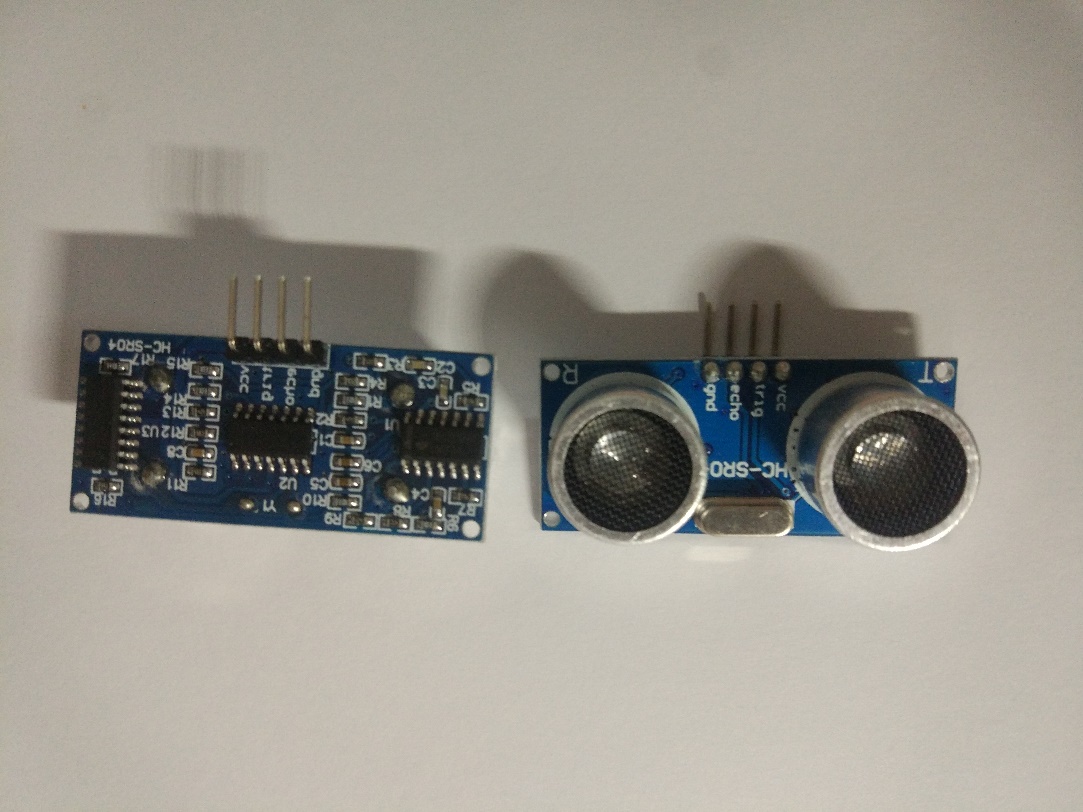
包含障碍物信息的数据的获取,主要是传感器方面的研究:使用什么类型的传感器,精度需要多少。普通的传感器如:超声波雷达,红外探测传感器,激光测距传感器,机器视觉摄像头等。主要原理都是:传感器发出某种物质,这种物质会因为障碍物发生改变,然后传感器接收返回的物质,将物质的改变情况的具体信息发给处理芯片分析,芯片根据这些信息还原出障碍物的信息。或者传感器接收障碍物发出的物质或反射的物质,再将物质的信息反馈给处理芯片,再由处理芯片分析出障碍物的信息。物质具体可以是超声波、红外线、激光、普通可见光和其它的电磁波。根据物质的不同,传感器也具体分为超声波雷达、红外线传感器、激光传感器、机器视觉摄像头、微波雷达等等。超声波是一种频率为20000赫兹以上的声波。它拥有方向性好,穿透能力强和能获得较集中的声能等特性。超声波雷达利用的物质是超声波。因为超声波的这些特性,利用超声波的原理制成的超声波雷达在短距离上具有很不错的测距效果[3]。超声波雷达具体应用在移动物体上用来测距的一个例子是:倒车雷达。超声波雷达的工作原理是通过超声波发射装置向外发出超声波,到通过接收器接收到发送过来超声波时的时间差来测算距离。常用超声波探头的频率有三种:40kHz,48kHz和58kHz。探头频率越高,测距灵敏度越高,但探测角度就越小。所以综合起来,普遍使用40kHz的探头。超声波雷达防水、防尘,即使有少量的泥沙遮挡也不影响。超声波探测范围在 0.1-3 米之间,而且精度较高,因此非常适合应用于泊车[4]。如图1.1 所示,车上的倒车雷达能很好地感知其它车的位置信息。
 图1.1 倒车雷达范围
图1.1 倒车雷达范围
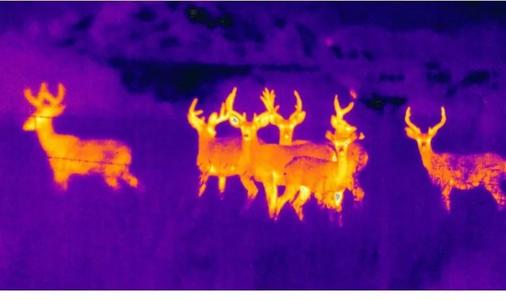
红外线传感器有两种形式:一种是自身发出红外线,然后接收被障碍物反射回来的红外线;另一种是热成像技术。前者主要是识别近距离的深浅色差别,深色对红外线的吸收更大,反射更小;而浅色对红外线的反射更大,吸收更小。根据接收到的反射回来的红外线的强度,就可以判断深浅色的边界。这个传感器在一些小型的巡黑白线的智能车上应用广泛。而作为后者的热成像传感器则是通过探测红外能量(热量),然后将其转换为电信号,之后再在显示屏上显示。不同的温度会对应不同的颜色。热成像在用于检测低温背景中的高温物体时效果非常好[5]。该方法在较暗环境下依旧能发挥很好的效果,而且还不会发射出任何其他物质,隐蔽性更强。该传感器多用于生物类型障碍物的检测。如图1.2所示,热成像下的鹿,能很轻松地从图片中获得鹿的形态信息。
激光测距使用激光器作为光源进行测距。激光具有单色性好、方向性强等特点,测距时精度更高。、激光测距仪的工作原理是:激光器向目标发射出一束激光,激光发射后碰到障碍物会被反射回来,光电元件会接收障碍物反射回的激光,然后计时器会对激光
束往返的的时间进行测定,从而通过公式计算出从激光测距仪到目标的距离[6]。激光测距
 仪拥有体积小、重量轻、操作简单等特点,并且其误差非常小,仅为其它光学测距仪的五分之一至数百分之一[7]。
仪拥有体积小、重量轻、操作简单等特点,并且其误差非常小,仅为其它光学测距仪的五分之一至数百分之一[7]。
图1.2 热成像下的鹿
机器视觉测距即使用摄像头来获取障碍物的信息,之后通过对包含障碍物信息的图像进行分析从而得到障碍物的各种信息。如距离、大小、方位等,更进一步甚至可以实习障碍物的识别等功能[8]。机器视觉测距的传感器是摄像头。摄像头的工作原理是:障碍物发射或反射的光经过镜头后,投射到摄像头的图像传感器上。然后图像传感器将光信号转为电信号,经过A/D转换后变为数字图像信号。之后数字信息被传输到数字信号处理芯片(DSP)中进行加工处理,就能得到图片或视频类的文件了。摄像头可以快速获取大量信息,并且这些信息与人眼获取的基本一致,更符合人的习惯。
超声波传感器的实际应用有张海波的基于无线传输和超声波测距的汽车防碰撞系统设计,他的设计本质上是一个倒车雷达,通过布置在车身的5个倒车雷达来获取车与障碍物的距离信息,再结合方向盘转角,当前车速来建立安全防撞模糊控制的模型[9]。还有陶凤的基于超声波测距的汽车安全防撞系统的研究,他使用嵌入式系统来处理超声波传感器的数据,并使用3G网络来传输数据实现对车的远程监控[10]。
机器视觉摄像头的实际应用有杨希的基于机器视觉的汽车安全辅助驾驶系统研究,他使用机器视觉的摄像头来完成对车道线的检测和交通标志的识别,车道线的检测用来实现偏离预警功能,在车道线的检测算法中,他提出了基于小波变换改进canny边缘检测算法,这样更好地降低了图片中的噪声[11]。还有郭宝军的基于机器视觉的移动机器人路径识别技术研究,他使用机器视觉摄像头来检测地面上的二维码以实现AGV的定位[12]。机器视觉摄像头的实际应用还有丁浩的移动机器人前景障碍物检测及避障系统设计与实现。他使用深度摄像头来获取移动机器人前方的障碍物信息,并通过滤波、障碍物轮廓提取、面积大小过滤、凸包处理等图像处理的方法获得障碍物的具体信息[13]。
1.3研究内容与论文结构安排
1.3.1研究内容
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: