微型无人驾驶电动物流车转向系统设计毕业论文
2020-02-17 10:57:16
摘 要
随着人工智能在各行各业的兴起,无人驾驶智能车将会成为人们日常生活中安全的交通工具。而无人驾驶车辆的转向系对于车辆行驶方向安全性具有关键作用,文中以微型无人驾驶电动物流车为对象,完成了其转向系统的设计,转向系以伺服电机为动力源,使用蜗轮蜗杆减速机构,转向器采用结构简单、适合微型汽车的齿轮齿条转向器,对于转向器和转向执行电机的布置方案采用平行轴式设计,改变了转向电机的安装方向,减少了转向系统沿着汽车纵轴线方向空间,排除了转向电机与前悬架弹簧等的干涉;考虑到未来转向系统的发展与设计方案的先进性,设计中采用一个整体式壳体,取消万向传动装置和联轴器,将减速器输出轴和齿轮轴使用花键连接,使得系统结构简单。本文通过对国内外微型无人驾驶电动物流车和线控转向系统现状分析,以及三种转向系统方案的对比得出适合本次设计的大体方案,然后确定此次设计方案选用的转向器和转向电机类型,通过计算转向力矩和转向角等系统参数,并利用CATIA软件完成转向系统模型的搭建。对于转向系统中容易发生弯曲折断的齿轮,计算校核了其弯曲强度,且完成了基于ANSYS的齿轮轴应力应变的有限元分析,最后绘制了此次设计的微型无人驾驶电动物流车转向系统效果图。
关键词:转向系统;无人驾驶;整体式;平行轴式设计;
Abstract
With the rise of artificial intelligence in all fields of life, driverless cars will become a safe ways of transportation in People's Daily life. And unmanned vehicle steering system plays a key role for vehicle safety, this paper takes with the miniature unmanned electric car as logistics, completed the design of steering system, the steering system takes servo motor as power source, uses turbine reducer, steering with simple structure, is suitable for the steering gear and rack, mini car for steering gear and dc motor of the layout scheme with parallel shaft type design, changed the direction of the installation of the steering motor, reduces the space in the direction of the vehicle longitudinal axis of the steering system, and eliminates the interference of steering motor and the front suspension springs, etc; Considering the development of the steering system in the future and the advanced design scheme, an integral housing is adopted in the design, the universal drive device and coupling are cancelled, and the reducer output shaft and gear shaft are connected by spline, making the system structure simple. Logistics at home and abroad based on miniature unmanned electric car and wire control steering system present situation analysis, and three comparison of steering system scheme is suitable for the design of general plan, and then determine the design scheme selection type steering gear and motor, by calculating the steering torque and steering Angle and so on system parameters, and using CATIA software to complete the construction of the steering system model. For the gear in the steering system that is prone to bending and breaking, so the bending strength was calculated and checked in the paper, and the finite element analysis of the stress and strain of the gear shaft based on ANSYS was completed. Finally, the rendering diagram of the steering system of the miniature unmanned electric logistics vehicle was drawn.
Key Words:Steering system;Unmanned vehicles;integral;Parallel axis design;
目 录
第1章 绪论 1
1.1 研究背景 1
1.2 目的和意义 1
1.2.1 研究目的 1
1.2.2 研究意义 1
1.3 国内外研究现状 2
1.3.1 无人驾驶平台 2
1.3.2 无人物流车现状 2
1.3.3 线控转向系统现状 4
1.4 主要研究内容 5
第2章 转向系统方案 6
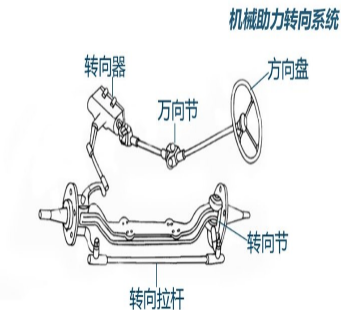
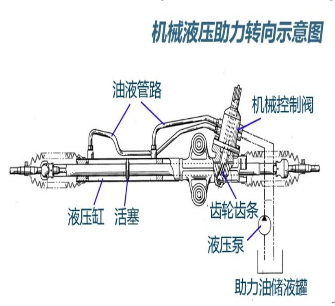
2.1 转向系统 6
2.2 转向器 7
2.2.1 转向器类型 7
2.2.2 齿轮齿条布置形式 8
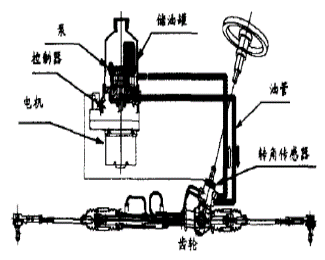
2.3 转向电机类型 9
2.4 转向系统方案 9
2.4.1 三种方案对比 9
2.4.2 确定转向系统设计方案 11
第3章 转向系统设计 12
3.1 转向系统设计要求 12
3.2 转向系统主要性能参数 12
3.2.1最小转弯半径 12
3.2.2最大外轮转角 13
3.2.3转向器传动比计算 14
3.2.4额定转向力矩 14
3.2.5额齿轮齿条模型 16
3.3 整体模型设计 19
第4章 齿轮轴弯曲强度校核 20
4.1 齿轮弯曲强度校核 20
4.2 齿轮轴有限元分析 21
4.2.1 齿轮受力分析 21
4.2.2 划分网格及添加约束 22
第5章 基于GUI的转向系参数化计算 23
5.1 参数化界面设置 23
5.2 输出界面及验证 24
第6章 总结 25
参考文献 26
附录A 基于GUI转向系参数化计算程序 28
附录B 转向系统爆炸图 37
致谢 38
第1章 绪论
1.1研究背景
无人驾驶汽车在未来有着广阔的发展前景,未来会成为人们日常生活中安全的交通工具。因此,无人驾驶技术倍受人们关注。无人驾驶技术是计算机技术,智能控制和视觉识别联合发展的产物,集视觉计算,人工智能,自动控制,体系结构等多种技术于一体,可以用来体现国家工业水平和科研实力。而无人驾驶技术正在应用与科研探索、火灾救援和军事作战等环境恶劣,危险的情况下,例如之前美国利用火星车在火星表面上的探索[15];在民用方面,无人驾驶智能车也具有很大的开发空间与广阔的应用前景,因为工作高效、安全、可靠以及方便的性能优势,可以提高有人驾驶的安全性和智能化,在未来将无人驾驶车辆和城市交通指挥部门实现联网,可以为用户规划最优路径,避开堵车路段,节省用户时间也确保了交通流畅。比如谷哥公司研发的无人驾驶车辆已经通过加州的法律,不久将投入市场[18]。游客在上海世博会公园的入口处只需要按下一个按钮,一辆无人驾驶的四座敞篷汽车就会来到你身边,随后游客可以乘坐它前往想去的景点。随着物流业的订单逐年增加,而物流就业人员有限的条件下,未来将无人驾驶技术应用于物流配送各个环节,将有致于减少人力成本,提高物流的配送效率,从而使物流成本大为降低,而无人驾驶物流车的转向系统是保证行驶方向稳定性的关键,对于其研究设计具有重要意义[19]。
1.2 目的和意义
1.2.1研究目的
物流业呈现出爆发式的增长,研究出一种能自动驾驶的微型电动物流车,减轻物流配送人员的压力,给消费者提供多样化、个性化的物流配送服务,将货物安全、准确的送到指定位置。
1.2.2研究意义
(1)减轻物流配送人员的压力。全国邮政管理工作会议在2018年提供的一组数据表明,在2017年物流从业人员仅有250万的情形下,而全国普通快递件数已经超过400亿件,相比前一年增长了28%;2018年各邮政、快递企业在“双十一”购物节当天共处理订单4.16亿件,同比增长25.12%,而主要电商企业当天更是产生超过13.52亿件快递物流订单,同比增长25.68%。在物流配送人员有限,而物流订单逐年增长的同时,将无人物流车应用于物流的各个场景后,在未来将有致于减轻物流配送人员的压力。
(2)为消费者提供多样化、个性化的物流配送服务。去年以来,不管是物流行业还是相关上下游企业,都在积极地开发无人技术,并将其应用到物流的各个场景中。国内的百度、京东、苏宁AGV、阿里小G、美团、顺丰和国外的英特尔、达美乐、Nuro等企业已经开发了新一代的无人配送人物流车[12]。已经实现辨别红绿灯和躲避障碍物,还能自动驾驶、 主动换道、自主泊车、路线规划、车位识别等。用户可以扫描二维码、输入密码、面部特征识别,也就是刷脸等形式实现快速取件和取餐,无人车配送将会给消费者一种眼前一亮的体验。
(3)无人物流是未来物流业发展趋势。无人物流是物流行业向智能化、自动化发展的一大趋势,它是将来物流业发展的金典代表之一,无人物流减少了人工物流在雨雪天配送的不便,可实现连续派送,而且方便高效在未来将有致于降低物流配送成本;将使后端供应链物流发生改变,提高效率,减少错误,能够降低商品成本,继而减少消费者的成本;并且便捷的运输可以给运输增值,为消费者带来更加愉悦的体验、提供创新服务。从各方面来说无人物流比人工物流更能满足人们日益增长的个性化需求。
所以本文拟以微型无人驾驶电动物流车,进行其专属的转向系统设计。
1.3 国内外研究现状
1.3.1无人驾驶平台
无人驾驶平台可以安全的实现无人车在多种复杂环境下算法的实验验证,且成本较低,为用户匹配和提供无人驾驶解决方案。现有的无人驾驶平台如百度的Apollo,全球开放数据量第一,拥有海量数据的仿真引擎,提供高自动化的高精度地图服务;百度的RoadHackers自动驾驶开放平台,提供无人驾驶算法的演示与中国驾驶数据;国外的三星DRVLINE自动驾驶平台[16]:提供车道偏移警告、适应式定速巡航、碰撞警告与行人侦测等;“英特尔GO”无人驾驶平台,经过英特尔凌动处理器、英特尔至强处理器、英特尔Arria10 FPGA 相互组合,可执行一系列无人驾驶功能,包括决策、融合和感知[13];还有正在起步阶段的谷歌Waymo, 福特等
1.3.2无人物流车现状
国内外微型无人驾驶电动物流车现状如表1.1所示。对于国内外微型无人驾驶物流车的总结,对于此次设计微型无人驾驶电动物流车初步确定为长1200mm,宽700mm,高500mm,车速10KM/h,整车整备质量500kg的无人电动物流平台,对其专属的转向系统设计。
表1.1 国内外微型无人物流车现状
公司 | 产品 | 参数 | 车型 | 应用 |
百度 | 2018年7月4日,新石器L4级无人驾驶微型物流车首次亮相 | 20公里/小时 高1.5m,宽1m,约2.5m; 装载量2.4 |
| 主营业务为半径5公里的配送餐饮和货物快递,已经在雄安和常州实现了落地 |
京东 | 2018年5月29日,在北京JD CUBE大会上出现的小型无人物流车 | 载重100公斤 续航20公里 一小时可实现18个包裹的配送 |
| 6月在杭州、西安、北京等6所高校内,测试给学生们送快递;“6.18”期间,在人民大学成功完成了首单配送。 |
阿里巴巴 | 2018年3月,L4级别的菜鸟小G,专为解决快递行业末端最后一公里配送 | 15公里/小时 续航60公里 载重是100公斤 |
| 小G已经在阿里巴巴杭州西溪园区附近往返10.5公里完成路测。 |
AutoX | 2018年AutoX与中通合作的小型无人物流车 | 10-15千米/小时 1立方米 |
| AutoX已经在中通上海本部园区内实现试运营,完成园区点对点的包裹运送服务。 |
苏宁 | 2018年4月16日,苏宁无人驾驶快递车——“卧龙一号” | 1公里30分钟、3公里1小时 续航8小时 |
| 国内首个可以和电梯信息交互的无人车,从户外到室内无缝切换,解决了社区复杂场景的配送需要。 |
中云智 | 2018年无人车底盘“中云1.0”、“中云1.1”,中型底盘“中云2.0” | 15公里/小时 长1.4m宽0.9m 以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。 相关图片展示:
您需要先支付 80元 才能查看全部内容!立即支付
最新文档

|