电动汽车差动助力转向系统控制研究毕业论文
2020-02-17 10:56:14
摘 要
在环境问题亟待解决、石油等不可再生资源日趋紧张的大环境下,电动汽车研发逐渐成为汽车工业发展的潮流。轮毂电机驱动电动汽车使用安装在各个车轮的轮毂电机取代传统内燃机作为动力源,不仅使得整车的机械结构更为简单、空间布置更加灵活,而且这种分布式的驱动形式可以独立、精确地控制各个车轮的驱动转矩,可以轻松实现车辆底盘动力学控制。上述优势为轮毂电机驱动电动车提供了一种全新的助力转向思路,即差动助力转向。
因此本文针对了差动助力转向系统控制进行了如下几个方面的研究:
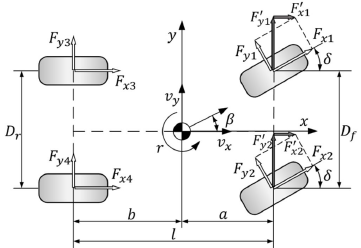
(1)建立轮毂电机驱动电动车整车动力学参考数学模型。其中包括三自由度(纵向、横向及横摆)车体动力学模型、车轮模型、魔术公式轮胎模型、轮毂电机模型、转向系统模型等,为控制策略推导、计算仿真铺垫。同时,在Carsim和Simulink软件中搭建上述各个模型。
(2)差动助力转向控制策略研究。充分分析差动助力转向基本原理的基础上,依据易于实现、参数调整方便的直线型助力曲线设计理想差动助力特性,并基于理想差动助力特性设计差动助力转向系统控制策略。
(3)Carsim/Simulink联合仿真。在低中高三种不同车速以及不同转向盘转角输入工况下进行了对比仿真实验。
研究结果表明:所设计的DDAS系统兼顾了转向灵敏性和转向轻便性,有效地减小了驾驶员方向盘手力,同时在车辆高速行驶时,助力效果相应减弱,使驾驶员能获得较好的路感信息反馈,满足了理想的助力特性。
本文的特色:本文建立的汽车动力学模型不仅满足精度要求而且足够简化;设计控制策略思路创新,考虑周全;采用Carsim/Simulink联合仿真的方式进行实证,结果分析严谨。
关键词:差动助力转向;轮毂电机驱动电动车;助力特性;Carsim/Simulin联合仿真
Abstract
Under the circumstances that environmental problems need to be solved urgently and non-renewable resources such as oil are running out, research on electric vehicle has gradually become a trend in the automobile industry. In-wheel Motor Electric Vehicle(IEV)replaces the traditional engine by motor installed in each wheel as the power source, which not only makes the mechanical structure of the vehicle simpler and the space arrangement more flexible, but also can control the driving torque of each wheel independently and accurately. So it is easy to control the dynamics of the vehicle chassis. The above advantages provide a new power steering idea for IEV, namely Differential Drive Assisted Steering(DDAS). Therefore, this paper has carried out the following researches on the control of DDAS system.
(1) Establishing a reference mathematical model for the dynamics of IEV. For the control strategy derivation, calculation and simulation, The model includes three degrees of freedom (longitudinal, lateral and yaw) car body dynamics model, wheel model, magic formula tire model, in-wheel motor model, steering system model, etc. At the same time, the above models are built in Carsim and Simulink software.
(2) Research on control strategy of DDAS. Based on the analysis of the basic principle of DDAS, the ideal differential assist characteristic is designed based on the linear assist curve which is easy to implement and convenient to adjust parameters. And The control strategy of DDAS is designed based on the ideal differential assist characteristic.
(3) Carsim/Simulink co-simulation. Contrast simulation experiments were carried out under conditions of different speeds (low, medium and high) and different steering wheel angle input. The results show that the designed DDAS system does well in both the steering sensitivity and steering portability, and can effectively reduce the driver's hand force. when the vehicle is driving at a high speed, the power-assisting effect is correspondingly weakened, so that the driver can get a better road Information feedback, which meets the ideal power-assisting characteristics.
Key Words:Differential Drive Assisted Steering;In-wheel Motor Electric Vehicle;power-assisting characteristics;Carsim/Simulin co-simulation
目 录
第1章 绪论 1
1.1 课题研究背景与意义 1
1.2 国内外研究现状 2
1.2.1 轮毂电机驱动电动车发展概况 2
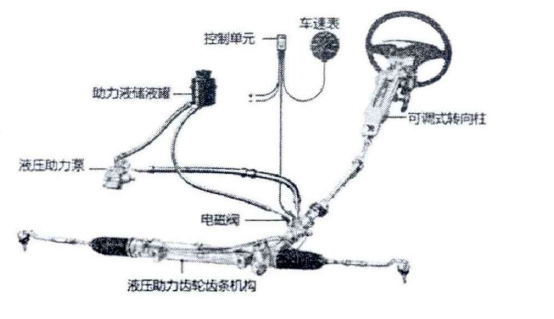
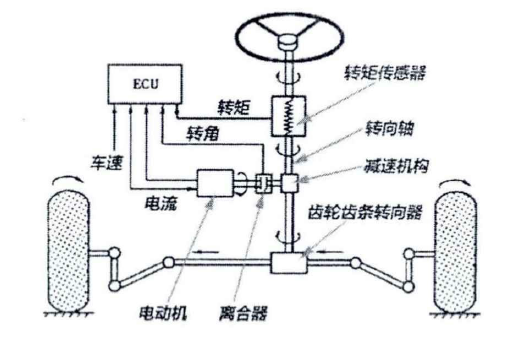
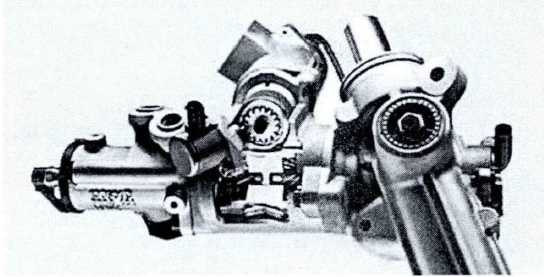
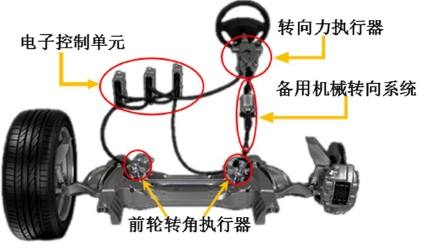
1.2.2 现有助力转向技术发展综述 5
1.2.3 差动助力转向国内外研究现状 9
1.3 本文研究目的和主要内容 12
第2章 轮毂电机驱动电动汽车动力学模型与仿真 13
2.1 整车动力学模型 13
2.2 车轮模型 14
2.3 轮胎模型 15
2.3.1 魔术公式轮胎模型 15
2.3.2 滑移率和侧偏角 17
2.4 轮毂电机模型 18
2.5 转向系统模型 20
2.5 驾驶员车速保持模型 22
2.6 基于Carsim的模型搭建 23
2.6.1 Carsim软件介绍 23
2.6.2 Carsim车身模型 24
2.6.4 Carsim转向系统模型 25
2.6.3 Carsim轮胎模型 26
2.7 本章小结 26
第3章 差动助力转向技术控制研究 27
3.1 差动助力转向基本原理 27
3.2 差动助力特性的设计 28
3.2.1 助力特性介绍 28
3.2.2 助力特性曲线 29
3.2.3 差动助力特性的确定 30
3.3 基于理想助力特性的差动助力转向控制策略 32
3.3.1 车轮滑移率控制 32
3.3.2 基于PID控制的转向轮转矩差直接控制 35
3.3.3 转向盘回正控制策略 36
3.4 本章小结 37
第4章 差动助力转向控制策略仿真验证 38
4.1 Carsim/Simulink联合仿真 38
4.2 轮毂电机驱动电动车差动助力转向系统仿真结构 40
4.3 差动助力转向控制系统仿真验证与分析 43
4.3.2 低速工况转向盘转角斜坡输入 43
4.3.2 中速工况转向盘转角正弦输入 44
4.3.3 高速速工况转向盘转角正弦输入 46
4.3.4 转向盘撒手回正工况 48
4.3 本章小结 49
第5章 全文总结 51
5.1 全文总结 51
5.2 工作展望 51
参考文献 53
致 谢 56
第1章 绪论
1.1 课题研究背景与意义
随着我国经济近几十年来的不断发展,人民生活质量相较以往上升了很多档次,大部分民众都有足够的经济实力购入汽车,人们在日产生活中也越来越与汽车密不可分,公安部交通管理局2018年7月16日发布,截至6月底,全国机动车保有量达3.19亿辆。汽车让人们出行更加方便、工作生活更加轻松,人们在享受便捷的同时,如此庞大数目的汽车,也造成了不可忽视的环境问题,例如汽车尾气带来的空气污染问题。同时,我国属于石油资源短缺国家,我国对石油资源进口率高到60%,其中80%用在汽车上[1]。
在各类环境问题亟待解决、石油等不可再生资源日趋紧张的大环境下,各大汽车厂商和汽车研究所都将目光聚焦在了低排放、低污染的电动汽车(Electrical Vehicle,以下称EV)上。电动汽车以电池作为动力源,电池给电机供电,然后驱动车辆行驶。电能属于可再生能源,电动车的普及可有效缓解石油等不可再生资源短缺的问题,同时,电能也是清洁能源,使用电动车能够有效减少传统燃油汽车的尾气排放,极大地缓解温室效应、城市雾霾等环境问题。现如今,一些混合动力汽车或者纯电动汽车已涌入市场且取得了不错的销量,诸如普锐斯、特斯拉、宝马i8等等。电动汽车动力来源于电能,电能属于清洁能源,又是可再生能源,其来源形式多种多样,不会像使用化石能源如石油一样产生污染且受到储备量的限制,所以电动车在新能源汽车的发展中占据了主导地位。国家政府也十分看中电动汽车的发展,国家制定的七大战略性新兴产业,电动车便位于其列,政府还先后发布了诸多政策措施来引导和刺激电动车国内产业的发展,如《节能与电动汽车产业发展规划》和《电动汽车“十二五”专项规划》等[2]。
根据动力设备在汽车上安装位置和分布形式的不同,纯电动汽车可以分为集中驱动电动汽车与轮边驱动电动汽车。集中驱动电动汽车仅是以电动机替换了内燃机,保留了传统内燃机汽车的传动系统,即离合器、变速器、万向传动装置、主减速器、差速器等,虽然这种集中驱动方式已经应用了很长时间,相应的技术也比较成熟,但是仍无法避免该驱动方式动力传输路线复杂、传动效率低下的弊端,并且各个车轮无法独立控制,没有完全发挥电动车的优势。而轮边驱动电动汽车采用安装在车轮中的轮毂电机直接驱动车轮的方式,摒弃了传统的传动系统,使得整车质量下降、传动效率很高、结构紧凑使得多出的空间可以用在其他地方。轮毂电机驱动电动汽车的轮毂电机即是执行器又是信息单元,可以通过检测电机的实时电压或者电流来获得四轮转矩信息,同时又可以独立精确地控制其各个车轮的转矩,据此特点可以实现利用左、右转向轮转矩差助力的新型差动助力转向或者四轮转向,还可以合理分配四轮转矩,提高汽车的操纵稳定性,具有广泛的应用前景。因上述各种优势,其被认为是电动汽车最理想的驱动方案[3]。

图1.1 装有轮毂电机的车轮
驾驶员在操纵车辆转向的过程中,由于汽车复杂的转向机构和很大地面与轮胎之间的摩擦力而十分费力,影响了驾驶的舒适性。对于传统汽车而言,基本都配备了一套助力转向系统来辅助驾驶员操纵汽车转向,如电动助力转向系统、液压助力转向体统等。而对于轮毂驱动电动汽车来说,由于其各个车轮的转矩可以独立控制,且其保留了传统汽车的转向系统,所以在转向时,可以分别控制其两侧转向轮的转矩,形成一个转矩差,该转矩差通过转向系统,传递到转向盘上,体现为一个助力转矩,由此可以减轻驾驶员转向盘手力,辅助驾驶员完成转向操作。该系统结构简单,并不需要额外增加动力装置和机械结构,利用电动汽车的驱动装置和控制系统便可以实现,极大地节省了空间和成本,很好适应了轮毂电机驱动汽车的特点,是助力转向未来的发展方向,也是本文研究的重点。
1.2 国内外研究现状与概况
1.2.1 轮毂电机驱动电动车发展概况
最早的轮毂电机驱动电动车于1900年问世,是由保时捷公司研发的Lohner Porsche,它采用轮毂电机驱动双前轮的驱动方式 [4]。而轮边驱动方式则可追溯到更早的十九世纪末,那时便有相关结构理念和专利问世,在1896年就出现了轮毂驱动的柴油机汽车。但是由于当时电机技术比较落后,电驱动技术水平有限,再加上电动车续航里程不足,该驱动形式的汽车没有得到进一步发展,被兴盛的内燃机汽车所取代。随着近年来轮毂电机技术的发展和电动汽车的推广,分布式驱动电动车又重新回到了人们的视线,国内外很多高校和研究机构等都搭建了自己的电动车实验平台来对其进行研究工作,主要集中于轮毂电机转矩控制和开发合适的底盘控制系统等。
电动轮(即将电机、减速器和制动器集成于一体的车轮)这个概念最早是由美国人罗伯特在20世纪50年代初提出。在此之后日本学者们对电动轮方面的研究取得了出色的成果[5]。日本Nagai教授所带领的科研团队开发了后轮轮毂电机驱动的试验用电动汽车Novle, Nagai 教授在试验车前部安装了雷达传感器,并由此进行主动避撞方面的研究,基于该试验车该团队还进行了驱动力协调控制的研究[6]。日本的Fujimoto 教授的科研团队研发了四轮驱动并采用四轮转向系统的轮毂电机驱动汽车Kanon,基于此研究车辆状态估计和节能驾驶[7]。
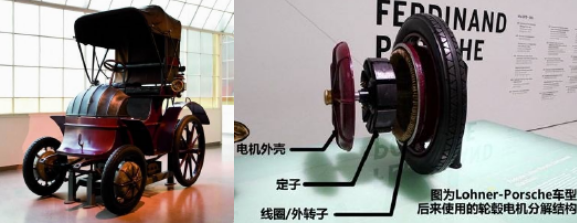
图1.2 Lohner Porsche电动汽车及其电动轮结构

图1.3 Novel(左)和Kanon(右)电动车
日本应义塾大学的清水浩教授所领导的科研团队在过去几十年间与日本多家汽车公司、科研机构都有过密切合作,开发出了ECO、IZA、Eliica、KAZ等多款电动汽车。其中轿车KAZ、 Eliica采用的是八电动车轮独立驱动。在良好工况下,KAZ最高时速可以达到311km/h,而Eliica最高车速可达400km/h ;KAZ的0~100km/h 加速时间为 8s,而Eliica0~60km/h 加速只需 4s。除了高校研究之外,日本各大汽车公司也先后推出了采用轮边驱动方式的车型,比如三菱公司先后推出的ColtEV和Lancer Evolution MIEV电动汽车,前者驱动方式采用的是后轮轮边驱动,而后者采用的是四轮轮边驱动;本田公司研发的燃料电池汽车FCX,它的驱动方式较为特别,前轮是依靠一个电机集中驱动,而后轮则是由两个电机在轮边分别单独驱动;丰田公司则陆续发布了FINE-X、FINE-T等四轮轮边驱动电动车 [8]。

以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: