电动小车自动起停跟随实验研究毕业论文
2020-02-17 10:53:13
摘 要
如今各大车企,研究单位越来越重视高级驾驶辅助驾驶系统的研究,同时市场对于高级驾驶辅助系统的需求旺盛。在此背景下,本文进行了起停自适应巡航系统控制策略研究,了解了起停巡航控制系统及ACC自适应巡航控制系统的研究历史及国内外研究现状,并说明了系统的基本原理,组成,结构及其具体功能。经过研究,本文将起停巡航系统控制器设计为分层式结构,分为顶层运动决策层,底层执行控制层。
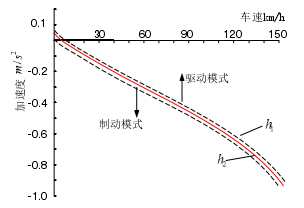
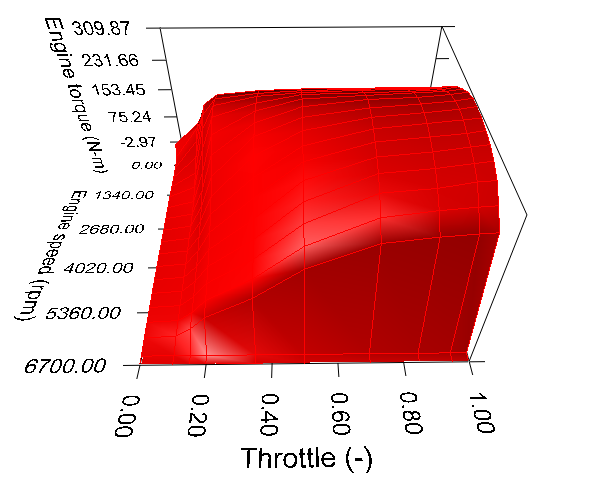
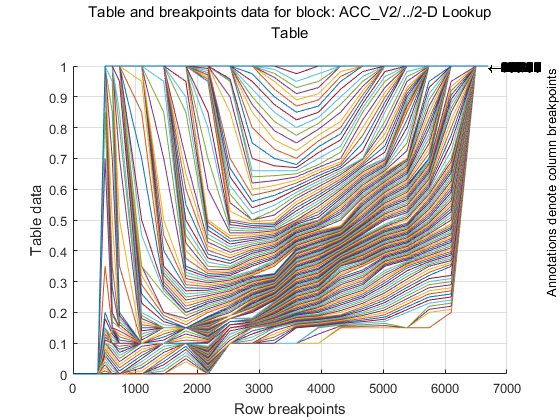
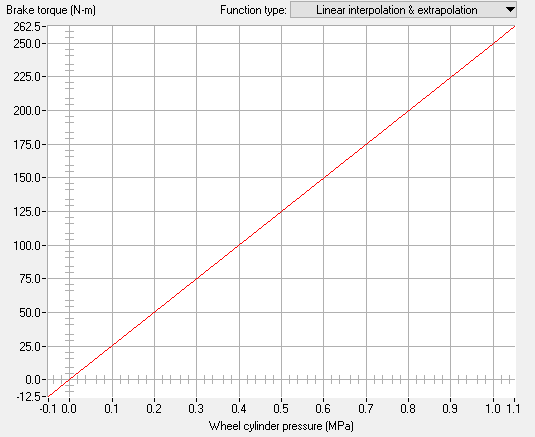
顶层运动决策层,通过可变安全距离模型,PI速度控制算法,线性二次型最优控制算法决策出期望的加速度。底层执行控制层建立汽车纵向动力学方程计算期望的驱动力矩,并通过发动机逆查询表查找该时刻期望的发动机节气门开度,进行驱动控制。基于汽车纵向动力学方程计算期望的制动力矩,并转换为制动主缸压力,进行制动控制。同时还设计了驱动制动控制模式切换策略。
为对起停巡航系统控制算法进行仿真,验证其有效性。本文搭建了Matlab/Simulink与Carsim的联合仿真平台。通过对系统典型运行工况的分析,其结果表明本文所设计的起停巡航系统控制策略能够实现自动跟随前方目标车辆起步停车,稳态跟随前方目标车辆等运行工况,并能有效且及时的应对复杂的交通场景,控制算法鲁棒性较好。同时通过调成控制参数能够实现不同驾驶风格的跟车模式 。
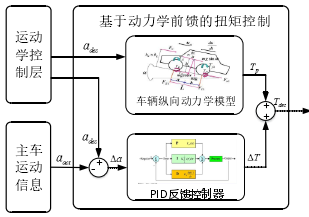
经过软件联合仿真验证后,在进行实车验证前,为尽量模拟现实场景,同时降低实车试验成本,将汽车动力学模型修改为模拟电动小车的汽车动力学模型,再次进行仿真验证。其仿真结果准确无误,随后进行实车试验。通过自动起停,跟随工况试验后发现控制效果在动力响应方面不够理想,并在底层控制器中加入前馈加反馈PID扭矩控制算法,并再次进行实车试验,实验结果较为理想,有效验证了设计的控制策略。
关键词:
汽车、高级驾驶辅助系统、起停巡航控制系统、线性二次型最优控制、扭矩控制
ABSTRACT
Nowadays, the research institutes of major automobile enterprises pay more and more attention to the research of advanced driving assistant system, while the market demand for advanced driving assistant system is strong. In This paper, the control strategy of start-stop adaptive cruise system is studied. The research history and research status of start-stop adaptive cruise control system and ACC adaptive cruise control system at home and abroad are understood. The basic principle, composition, structure and specific functions of the system are explained. After research, the controller of start-stop cruise system is designed as a hierarchical structure, which is divided into top-level motion decision-making layer and bottom-level execution control layer.
At the top level, the expected acceleration is determined by variable safety distance model, PI speed control algorithm and linear quadratic optimal control algorithm. The bottom executive control layer establishes the vehicle longitudinal dynamics equation to calculate the desired driving moment, and finds the desired engine throttle opening at that time through the engine inverse query table for driving control. The desired braking moment is calculated based on the vehicle longitudinal dynamic equation and converted to the main cylinder pressure for braking control. At the same time, the switching strategy of driving and braking control mode is designed.
In this paper, a joint simulation platform of MATLAB/Simulink and Carsim is built to validate the control algorithm of start-stop cruise system. Through the analysis of typical operating conditions of the system, the results show that the control strategy designed in this paper can achieve automatic starting and stopping, steady-state Car-Following and other operating conditions, and can effectively and timely respond to complex traffic scenarios, and the control algorithm has good robustness. At the same time, different driving styles can be achieved by adjusting control parameters.After the joint simulation of the software, in order to simulate the real scene as much as possible and reduce the cost of the real vehicle test, the vehicle dynamic model was modified to simulate the vehicle dynamic model of the electric car, and then the simulation was carried out again. The simulation results are accurate, and then the vehicle test is carried out. Through automatic start-stop and follow-up test, it is found that the control effect is not ideal in dynamic response. Feedforward and feedback PID torque control algorithm is added to the bottom controller, and the vehicle test is carried out again. The experimental results are ideal, which validates the designed control strategy effectively.
Key Words:
Automobile,Advanced Driver Assistance Systems, Stopamp;Go Cruise System, Linear quadratic optimal control, Toque Control
目录
摘要 I
ABSTRACT II
第1章 绪论 1
1.1 研究的背景及意义 1
1.2 起停巡航控制算法研究现状 2
1.3 主要研究内容 4
第2章 起停巡航系统控制策略设计 6
2.1起停巡航系统架构 6
2.2顶层控制器算法设计 6
2.3底层控制器算法设计 14
2.4本章小结 20
第3章 起停控制策略仿真分析 22
3.1系统仿真平台 22
3.2系统软件仿真平台 25
3.3典型工况仿真分析 34
3.4本章小结 41
第4章 起停巡航系统实车试验研究 42
4.1起停巡航系统实车试验平台搭建 42
4.2实车试验 45
4.3本章小结 47
第5章 结论与展望 48
5.1全文总结 48
5.2工作展望 48
参考文献 49
致谢 52
绪论
如今,随着国民经济的发展,人民的生活水平不断提高。汽车人均保有量的日益提高,汽车已经成为千家万户出行的首选,同时汽车扩大了人们的活动范围,生活方式,但随之而来的便是能源消耗、交通事故、道路阻塞、环境污染等一系列社会问题。为了降低这些问题产生的影响,研发人员不断改进车辆技术,使汽车更加智能,更加环保,其中高级驾驶辅助系统(Advanced Driver Assistance Systems,ADAS)产生的作用尤为突出。作为ADAS的重要组成部分,汽车自适应巡航控制系统(Adaptive Cruise Control,ACC)又称智能巡航控制系统、自动智能巡航控制等。起停巡航系统在原有的定速巡航控制系统的基础上进一步发展,升级,除了具备定速巡航功能,汽车前方的道路交通环境也可以通过感知层中雷达、摄像机等传感器进行检测。当发现当前主车的行驶车道前方有其他车辆时,系统控制器将根据感知层车载传感器返回的一系列数据,如:主车和前方目标车之间的相对距离,相对速度等,通过调节发动机节气门开度或制动主缸压力,对车辆进行驱动或制动控制,使本车与前车实际距离收敛于期望的安全距离,从而避免交通事故发生,缓解驾驶员驾驶疲劳,减轻驾驶员工作负担,降低汽车燃油消耗,同时提升公路通行效率,减少交通拥堵情况发生[2]。
研究的背景及意义
汽车的诞生极大地影响了人们的生活方式,让人们的出行时间,出行方式发生了极大的转变,人们的活动范围从点扩大到面,提高了人们的生活半径。汽车作为21世纪最有影响力的发明之一,它无时不刻不影响着人们的社会生活,这也使得汽车产业能够迅猛发展。随着我国汽车产量及汽车保有量急剧增加,根据公安部交通管理部门公布的统计数据,到2017年底,我国国内汽车保有量达到了惊人的209.067亿辆,其中载客量约为1.854万辆,货车保有量约为233885万辆。2018年,全国新增的机动车达到3172万辆,机动车数量达到3.27亿辆,其中汽车达到2.4亿辆,小型客车数量首次突破2亿辆,创下历史新高。机动车驾驶人数达4.09亿,其中机动车驾驶人数3.69亿。截至2018年底,全国车辆总数达到2.4亿辆,较2017年增长2.85亿辆,增长幅度高达惊人的10.51%。其中私家车继续快速增长,2018年私家车数量达到1.89亿辆,过去5年均增长1952万辆。但是汽车保有量的不断增加,交通事故频频发生、能源消耗与日俱增,环境污染严重,空气质量下滑,交通堵塞等一系列社会问题也日益凸现出来。
据统计,2017年全国发生的交通事故达到惊人的203049起,共计死亡人数达63772。其中,交通事故和汽车死亡人数最多,其中139412起交通事故中造成了46817人死亡,139180人受伤。比2016年交通事故总死亡人数34292,增加了12525人。 由此可见,机动车的保有量的剧增,不仅造成了交通拥堵,空气质量下滑,也使得我国因交通事故而死亡的人数也在逐年激增,同时也造成了大量经济损失。
汽车保有量的增加带来的另一个问题便是交通拥堵,道路利用率低。据统计美国城市地区,因交通堵塞造成的能源浪费,时间浪费,损失折合1210亿美元;北京市由于交通堵塞造成的经济损失达45.2亿元[3];香港每年因车辆拥堵而造成的经济损失高达3亿多美元。
同时汽车尾气作为大气污染物的主要来源,一直备受人们关注。研究结果显示,汽车尾气含有多种化合物,其中的污染物有固体形态的颗粒物、氮氧化合物NOX、金属铅、硫氧化合物SOX、一氧化碳CO、二氧化碳CO2、碳氢化合物CHX、等。一辆汽车一年的尾气排放量高达自身重量的三倍。英国环境保护协会曾发表研究报告称,英国每年由于空气污染造成死亡的人要比交通事故遇难者多出13倍。同时,还有结果表明全球城市大气污染约60%来自汽车的尾气排放。汽车尾气危害人体健康的同时还造成酸雨及光化学污染,对人们生活的环境产生巨大威胁,因此,尾气污染成为备受当今社会关注的问题之一。
通过以上的数据,能够明显看出汽车为人们带来便利的同时也会造成一定的危害。为缓解以上问题产生的影响,电动汽车以及汽车主动安全已成为如今汽车行业关注的重要领域。其中高级驾驶辅助系统是各个科研机构的研究重点。高级驾驶辅助系统主要包括车道偏离预警系统、车辆碰撞预警系统、车道保持系统、自适应巡航系统等[4]。
起停巡航控制算法研究现状
起停巡航系统由自适应巡航控制系统发展而来,自被提出以来,已有许多企业,科研机构进行研究,国外的主要研究单位有韩国汉阳大学[5],意大利都灵大学[6],德国BOSCH公司[7]等,国内的科研单位代表有清华大学[8],吉林大学[9],北京理工大学 [10],武汉理工大学等。
现阶段起停巡航系统控制器主要分为两种:分层控制[11]及分工况控制[12]。分层控制结构主要分为:感知层,顶层决策层,底层执行层。其中感知层通过雷达,摄像头,GPS等传感器感知周围交通环境及自车运动状态信息,并捕捉目标车辆。顶层运动决策层根据感知层传送的数据进行合理规划,决策出最优控制目标。并将数据传送给底层执行控制层,将最优控制目标转变为执行命令,传输到执行器中,实现车辆的起停巡航控制。
意大利都灵大学的Canale[13]设计的ACC起停巡航系统架构为分工况结构,共分为三个工况:自动起步,自动停车,稳态跟随。在每个工况下进行驾驶员驾驶行为数据采集,并根据数据进行驾驶员加行为分析,寻找驾驶行为规律。其控制器控制算法采用前馈加反馈的控制器。
Sang-Jin Ko[14]采用模糊控制对汽车发动机节气门以及制动系统进行控制,并由实验数据分析得出,虽然节气门和制动系统的输入响应性低,同时存才一定的噪声及波动,但主车在进行定速巡航时具备良好的稳定性。
韩国Yi.K[15]设计的起停巡航控制系统的顶层控制器控制算法采用先行最优控制,同时设置加速度饱和限制,防止加速度幅值变化过大,引起舒适性降低。同时底层控制器建立车辆逆动力学模型,用通过PI扭矩控制实现车辆驱动制动控制。
英国金斯顿大学的Payman Shakouri等人采用线性模型预测控制算法设计顶层控制器,可以通过前方目标车辆的纵向位置自动切换定速巡航模式及距离控制模式[16]。
Van den Bleek等人采用线性模型预测控制算法设计顶层控制器,该模型的输入参数包含主车车速,辆车相对速度及相对距离[17]。
美国伯克利大学S.G.KIM等人改变巡航控制算法中的加权比例系数,其能够根据不同目标进行实时调整,大大改善了驾驶舒适性[18]。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: