驻车制动器在线装调设备系统设计毕业论文
2020-04-09 14:03:04
摘 要
AbstractThe parking brake is a braking device that is used to stabilize the vehicle and prevent the car from sliding when the vehicle is parked. The reliability of the vehicle brake system is the main indicator to evaluate the performance of the car, and its using performance directly affects the safety of the car when parking brake. If the adjustment process is unreasonable, it will lead to insufficient vehicle parking brake force, or the automatic adjustment clearance of the brake caliper is too small, and then bring about problems such as the wheel brake force is too large, brake delay and other issues, affecting vehicle reliability. The use of automatic adjustment equipment can reduce the drag torque of the vehicle and improve the fuel economy and power of the vehicle. It has important economic value. It is an inevitable trend and objective need to develop a parking brake on-line installation and adjustment system that meets the requirements of automobile assembly and production. At the same time, the system can improve the quality of automobile products, reduce the failure rate, improve the safety of vehicles, and has practical application value.
By analyzing the structure and working principle of the parking brake system and parking brake handle, comparing the manual adjustment process of the parking brake and analyzing its defects, an on-line parking brake adjustment system was designed. The paper mainly studied several aspects:
(1) Introduce the structure and principle of the parking brake system. Through understanding and analyzing the manual adjustment method of the brake system, the defects existing in the brake system are found out, and the basic conception of the design of on-line installation and adjustment equipment system of parking brake is carried out.
(2) According to the requirements of the on-line installation and adjustment equipment system and the calculation of the torque required in the adjustment process of the parking braking system, the servo motor, reducer and torque sensor used in the equipment are selected.
(3) According to the structure of brake handle and automobile inner bottom plate, non-standard parts such as handle gripper, ratchet lock release device, special support for adjusting nut operation mechanism and fixing device for torque sensor are designed. At the same time, the turning problem of the steering mechanism is found through the force analysis of the brake handle control mechanism, and the corresponding solution is put forward. Finally, the handle gripper is analyzed by using WORKBENCH, and the structure of the handle gripper is improved according to the analysis results.
(4) On the basis of the LabVIEW platform, the software realization of the installation and adjustment system is completed, which mainly includes the motion control of the brake handle, the adjustment of the adjusting nut and the storage and reading of the data. At the same time, starting from the whole workflow, the necessity of sudden stop and the corresponding strategy are considered, and the control strategy of automatically terminating the program in the case of torque overload is also considered.
The research results show that the on-line installation and adjustment system of parking brake can make up for the defects of poor consistency and low precision in manual adjustment, and greatly improve the quality and efficiency of installation and adjustment, so it has a high engineering application value.
The characteristics of this article: hierarchical, reliable data, simple text, thorough explanation, rigorous reasoning, correct argument.
Key words: Parking brake,Online adjustment, LabVIEW ,Control strategy
目 录
第一章 绪论 1
1.1 研究背景 1
1.2 目的及意义 2
1.3 国内外研究现状 3
1.3.1 国外研究现状 3
1.3.2 国内研究现状 4
1.4 课题研究内容 6
1.5 预期目标 6
1.6 本章小结 6
第2章 驻车制动在线调整设备系统的理论研究 7
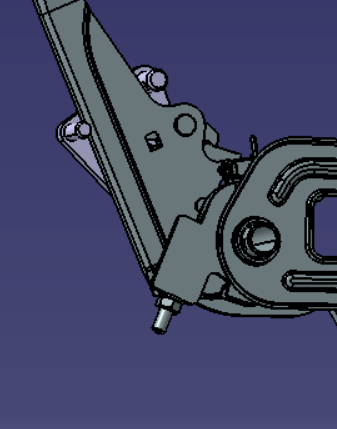
2.1 驻车制动系统的研究 7
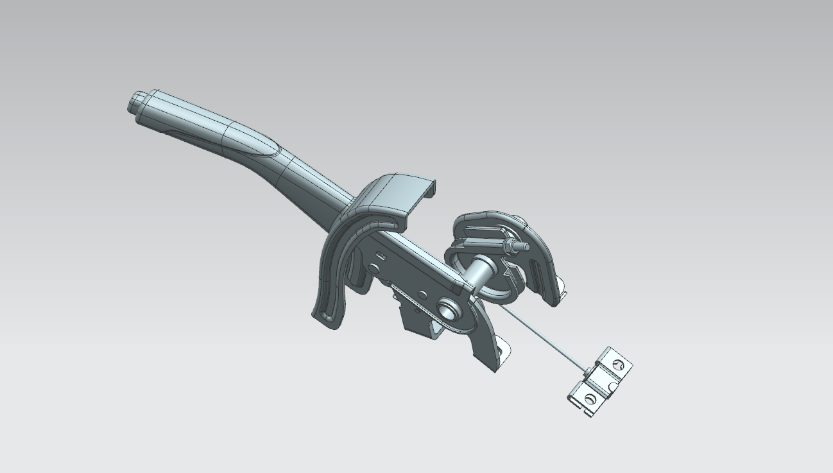
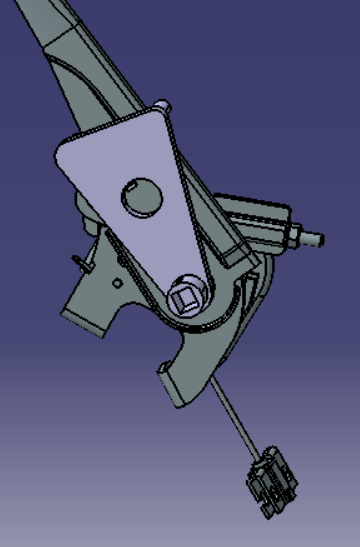
2.2 驻车制动手柄的研究 8
2.3 驻车制动系统人工调整工艺的研究 9
2.4 在线装调系统的设计方案 10
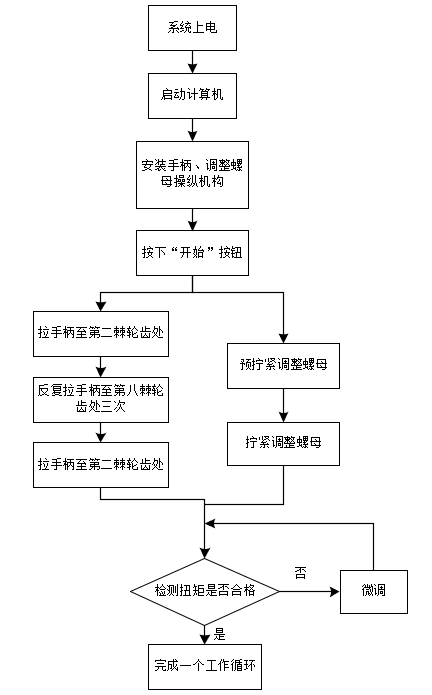
2.4.1 在线装调的工艺流程 10
2.4.2 驻车制动器在线装调设备 10
2.4.3 驻车制动在线装调系统工作流程 11
2.5 本章小结 12
第3章 在线装调系统的硬件 13
3.1 在线装调系统的要求 13
3.2 标准件的选型 13
3.2.1 伺服电机 13
3.2.2 减速机 16
3.2.3 扭矩传感器 17
3.3 非标准件的设计 18
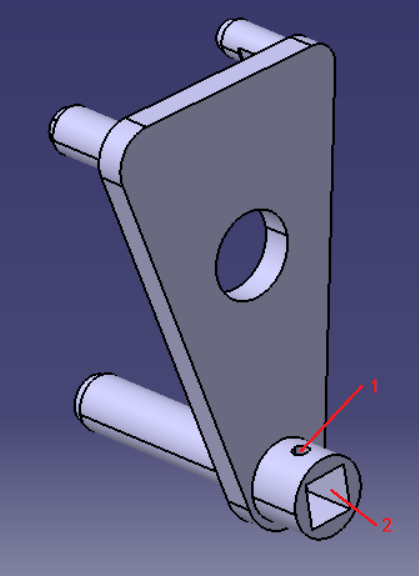
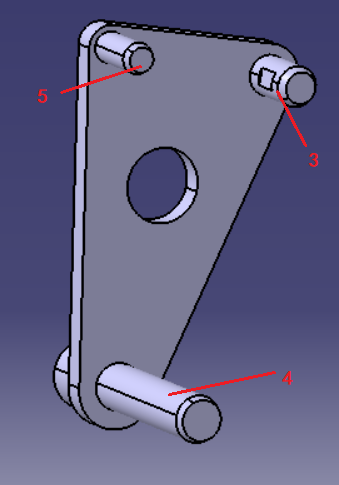
3.3.1 驻车制动手柄抓持器 18
3.3.2 驻车制动手柄棘轮锁释放器 20
3.3.3 扭矩传感器固定支架 21
3.4 调整螺母的操纵机构固定支架 23
3.5 手柄抓持器的各项分析 25
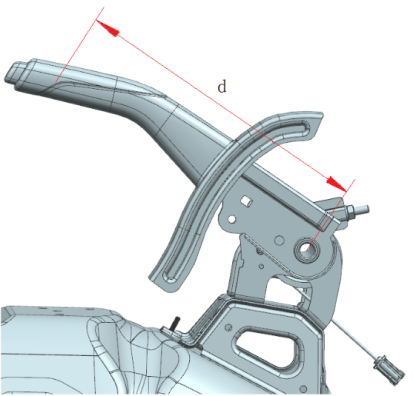
3.5.1 驻车制动手柄转动角度误差分析 25
3.5.2 驻车制动手柄抓持器的有限元分析 27
3.6 驻车制动手柄操纵机构的翻转分析 28
3.7 本章小结 33
第4章 在线装调设备系统的软件开发 34
4.1 后面板介绍 34
4.2 前面板介绍 42
4.3 本章小结 42
第5章 结论 44
5.1 研究总结 44
5.2 研究展望 45
致谢 46
参考文献 47
第一章 绪论
研究背景
根据国家统计局发布的《2017年国民经济和社会发展统计公报》显示,2017年国内生产总值(GDP)达到827122亿元,比上年增长6.9%。全年人均GDP为59660元,比上年增长6.3%。近年来国民经济的飞速增长刺激着人民的物质需求不断提高,汽车已经成为各家各户必不可少的工具,汽车产品的需求与销量也是水涨船高。
在刚刚过去的2017年,全球汽车市场持续保持景气,销量一举突破9000万辆大关,其中中国和美国构成第一世界,日本、印度、德国、法国和英国等市场的销量也轻松超过100万辆。前十大市场份额超过全球份额四分之三,中国更是独占全球市场的三分之一,成为市场的真正统治者。图1.1显示了2017年全球汽车销量国别份额比例。
图1.1 2017年全球汽车销量国别份额比例示意
根据中国汽车工业协会发布的统计数据,从2008-2017年,我国的汽车产销量不断增长,并在2017年达到新高,全国汽车产销2901.5万辆和2887.9万辆,连续九年蝉联全球第一。图1.2显示了2008-2017年中国汽车产销量情况。
随着交通越来越发达,人民越来越富裕,各家各户都开始有了自己的汽车,相比于之前,如今汽车的社会保有量持续的快速增长,截止2017年底,我国的机动车保有量已经达到惊人的3亿多。同时随着汽车数量的增多,交通变得越发复杂,由汽车造成的危险事故也越来越多,其中许多事故是由于汽车本身的安全性能所引起的,不仅对财产安全造成影响,更对车主的人身安全造成侵害。当今社会越来越强调安全的重要性,各行各业都是保证安全第一,汽车行业也是一样,必须先保证汽车的安全性能,才能更好的为车主展示其产品性能。
德国政府提出“工业4.0”战略,并在2013年4月的汉诺威工业博览会上正式推出,工业4.0迅速成为德国的另一个标签,并在全球范围内引发了新一轮的工业转型竞赛。在新的国际国内环境下,中国政府立足于国际产业变革大势,作出了全面提升中国制造业发展质量和水平的重大战略部署,即中国制造2025。中国制造2025 中,汽车产业是不可或缺的。想要成为汽车强国就必须加强技术创新,着力突破关键技术,例如在新材料、新工艺、新装备上的突破。在人们对汽车需求量的增加和中国制造2025战略部署的双重背景下,汽车企业一方面需要提高汽车的生产效率,满足人们日益增长的需求量;另一方面需要在工艺装备等方面不断创新,提高自身产品质量的一致性与可靠性,不断提升企业品牌的市场上的满意度。在这样的大环境下,汽车研究人员必须不断的对当前落后的设计、制造工艺以及生产方法进行创新与完善,同时不断地优化制造工艺路线,进一步实现各种落后的手工工艺流程向现代化的机械自动化转型,逐步迈入实现工业2.0的强国之路。
图1.2 2008-2017年中国汽车产销量情况
目前,某汽车公司工艺路线上的驻车制动系统采用的是人工调整方式。根据该公司提供的大量数据显示,驻车制动系统调整的劳动强度大,因而该工位是提高生产效率的瓶颈工位,且由于调整质量涉及的影响范围广而重,而调整质量受人为因素影响大。为了避免驻车制动系统的调整因这些因素的影响而带来产品质量一致性的问题、以及因影响阻滞力进而影响燃油经济性的问题等,开发一种驻车制动系统的自动调整系统用于总装线上驻车制动系统的调整,成为了该公司生产线上丞待解决的重要课题之一。
1.2 目的及意义
驻车制动系统作为汽车上必不可少的部件,对汽车的安全性和燃油经济性有着重要的影响,因此在设计与装调时必须保证其可靠性,否则会给汽车的停驻、坡道起步等带来一定的安全隐患。装调质量的好坏对驻车制动性能的影响主要体现在车轮阻滞力上。如果装调过程不合理,可能会导致制动卡钳自动调整间隙过大,驻车制动器拉索的预紧力过小,制动摩擦片难以与制动盘产生摩擦,进而造成停驻的不可靠;还可能会导致制动卡钳自动调整间隙过小,驻车制动器拉索的预紧力过大,使得在非制动状态下制动摩擦片与摩擦盘之间扔产生较大摩擦力,此时出现车轮阻滞力以及制动拖滞,造成发动机额外的功率消耗,降低汽车的燃油经济性和动力性,同时还会加剧摩擦片的磨损,降低制动器的寿命。
目前,部分车企仍采用手工装调的方式,该方式不仅过程繁琐,工作效率较低,较大的增加了工人的劳动强度,而且受人工因素的影响大,难以保证装调的一致性和质量的稳定性。装调质量会影响阻滞力的大小,进而带来汽车安全性、动力性和燃油经济性等问题,严重影响了汽车产品的质量。因此设计开发一种驻车制动器在线装调设备系统应用于车企总装线上驻车制动器的调整,具有重要的工业应用价值。
1.3 国内外研究现状
由于驻车制动器的在线装调过程涉及对交流伺服电机的控制,因此本文针对交流电机的控制策略和技术的发展进行相应的国内外发展现状的介绍。
1.3.1国外研究现状
20世纪70年代,基于对交流电机动态模型的研究,由于动态模型的参数较多,参数变化不是线性,因此人们对交流电机的动态模型的控制投入了很大的精力,此时Blasehke.F经过长时间的研究,基于获得更好的动态特性的目的,他研究并提出了矢量控制方法,通过矢量控制的方法,可以将参数多且复杂的交流电机转变成对直流电机的控制,以此来达到对交流电机的控制[1]。矢量控制法由于其优越的控制效果,得到了极大的发展,如今已经广泛的运用于电机控制领域[2]。由于矢量控制法的核心是对坐标的转换,因此它有着很高的精度,所以能在对电机的控制上有着很好的表现,当时由于坐标变换对数据参数的变换以及精度要求较高,因此在电机的参数发生变化时,容易导致在坐标变换时出现不确定的情况,从而使得对电机控制的不准确[3]。
20世纪80年代,在当时电机控制技术还发达的情况下,由于人们还无法掌握对交流电机这个非线性对象的直接控制,因此较多的研究在对电机传统控制方法上,即对交流电机的线性控制方法。在这样的时代特征下,Garcia和Motari提出了内模控制,这是一种基于模型的控制方法[4]。相比于矢量控制法,电机参数的变化对内模控制法的影响较小,不会因为电机参数的变化而导致对电机控制的不准确,换言之就是内模控制法的调节能力较强,不易受到其他不确定因素的影响[5]。但是由于它是一种基于内部模型的控制方法,因此必须要匹配获取内部模型,否则很难达到预期的控制效果[6]。
在矢量控制法的提出之后,人们依然坚持着对控制理论的研究,希望能找到新的控制理论来解决矢量控制法存在的缺陷,经过不断的研究,德国的Depenbrock.M提出了直接转矩控制,直接转矩控制法放弃了对坐标的转换,而是直接将其看成整体并对其转矩进行控制,其好处就是省去了坐标变换中的复杂计算,简化了控制过程[7]。这种新提出的控制理论看似十分完美,但是通过对其实际的应用发现直接转矩控制法在对高速情况下的控制效果十分好,但是在低速情况下的控制效果却不尽如人意[8]。在发现其缺陷之后,对其的改进措施也很快被发现,及将直接扭矩控制法与其他控制方法相结合,既然直接扭矩控制法在低速情况下的控制效果不尽如人意,那么可以使得在低速情况下采用其他的控制方法,以此来弥补该缺陷[9]。由于直接控制法的优秀效果以及对其缺陷的弥补,如今直接扭矩控制法已经大量的用于对交流电机的控制[10]。
随着电子与微处理器领域的快速发展,人们对复杂算法的研究越来越深刻,因此人们不再拘泥于传统的对电机的线性控制,而是开始进行复杂的交流电机的非线性控制。在这个研究热点下,Ortega.R提出了无源性控制,这是一种非线性的反馈控制法 ,由于它符合交流电机的非线性特征,因此可以直接反馈输出,使得其控制策略设计简单,但是在实际的运用中发现其Lagrange结构常常会遭到破坏,从而导致无源性控制法对电机的控制的稳定性不够,无法较好的满足要求[11]。在这个的基础上,Ortega.R等人提出了端口受控的耗散哈密顿,这种方法能较好的解决无源性控制法中出现的Lagrange结构遭到破坏的问题[12]。但是由于端口受控的耗散哈密顿的提出时间相比较短,目前仍在研究阶段,因此还不够完善和成熟。
由于交流电机具有多变量,非线性等特征,使得无论是线性控制方法还是非线性控制方法都无法完成对交流电机的精确控制,因此基于对这交流电机精确控制的思考以及人工智能领域的快速发展,对交流电机的智能控制已经成为了一大热点[13]。比如为了解决参数变化以及数学模型难以建立等情况下的电机精确控制,人们研究了仿造人类大脑思维的方式来对其进行控制,提出了模糊控制法,这样就能省去对模型的建立以及许多的计算,但同时因为其对对象的模糊处理,使得精确度较差[14]。基于对人工智能的研究,人们也提出了神经网络控制法,对于交流电机的控制问题,它可以进行自学,因此这种控制方法可以适应于绝大部分的不确定情况,但是由于人工智能等技术的限制,使得这种方法的学习能力无法达到很高的水准,同时其学习速度也不尽如人意[15]。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: