可全向弯曲的软体驱动设计与运动仿真毕业论文
2020-03-13 09:41:22
摘 要
近年来,软体机器人成为机器人学科探索的最前沿的热点,结合了材料、生物、机电等多学科多领域,在救援、探测特别是医疗康复领域等方面表现出很大的潜力。因此,开展关于软体机器人的各方面的研究是十分必要的。
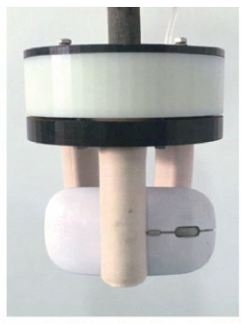
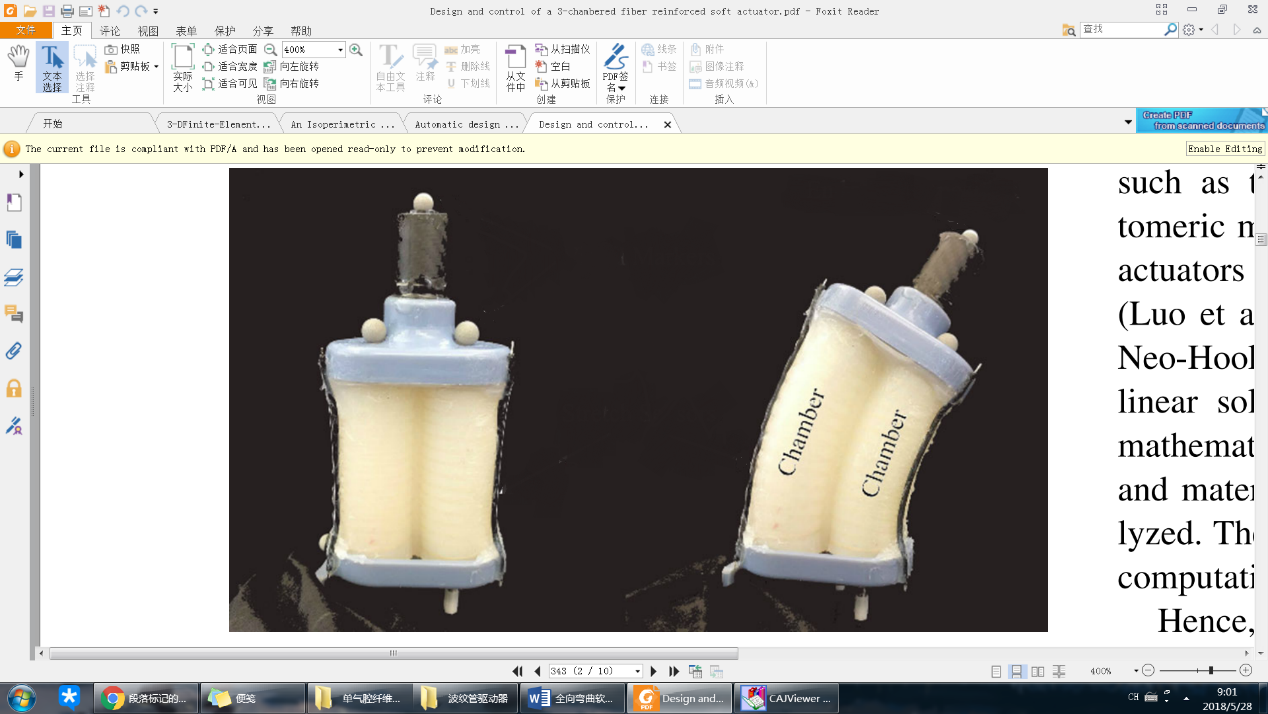
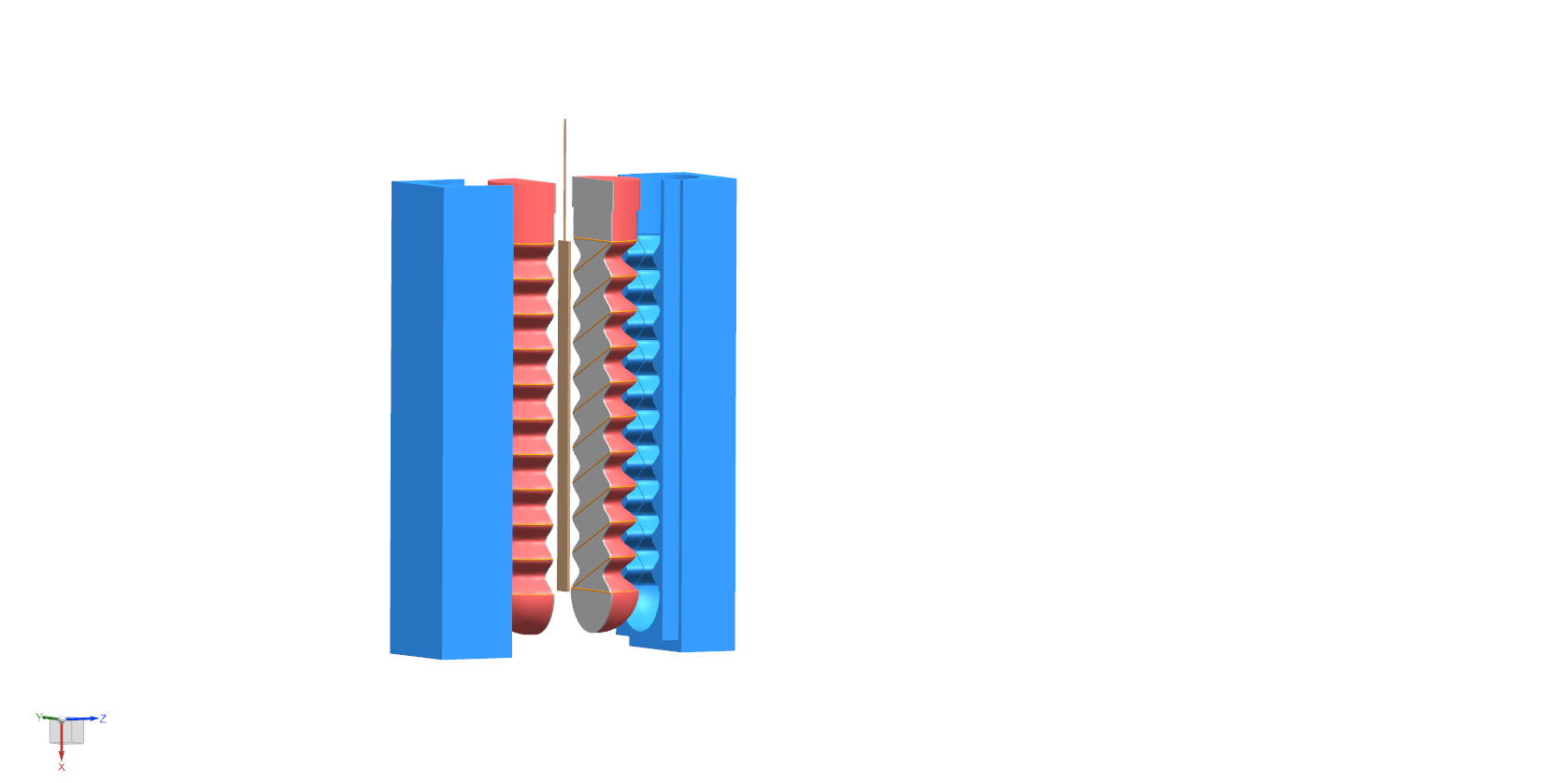
论文主要研究了一种新型的可全向弯曲的软体驱动器,具有三个扇形气腔,呈辐射状均布在软体驱动器内部。中心处设置有型芯结构,用来提高驱动器轴向刚度。在驱动器外壁缠绕有成一定角度的纤维线圈,用作对驱动器径向膨胀的限制。
通过总结现有的研究进行软体驱动器运动原理设计,并针对手腕型外骨骼的思路提出结构设想,进行软体驱动器模型建立与制作。通过有限元分析软件ABAQUS对软体驱动器进行运动学及力学分析,并进行多组对比得出不同结构参数对于驱动器运动模式的影响。
关键词:软体机器人;驱动器;有限元
Abstract
Software robot is the most advanced research in the field of robotics which is gradually rising up in recent years. Combining with many disciplines and fields such as materials, biology, and electromechanics, soft robot shows great potential in the field of rescue, detection, especially medical rehabilitation. Therefore, it is very necessary to carry out research on all aspects of soft robot.
This paper mainly studies a new type of omnidirectional bending soft actuator, which has three fan-shaped air chambers distributed radially inside the soft actuator. A core structure is set at the center to increase the axial stiffness of the actuator. Fiber coils at a certain angle is wound around the outer wall of the actuator to serve as a limit to the radial expansion of the actuator.
By summarizing the existing research, the principle of the soft actuator movement is designed, and the idea of the structure of the wrist exoskeleton is proposed, and the soft actuator model is established and manufactured. The kinematics and mechanics of the soft actuator were analyzed by the finite element analysis software ABAQUS, and several groups of comparisons were made to obtain the influence of different structural parameters on the actuator motion mode.
Key Words:soft robot;actuator;finite element analysis;
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: