基于遗传算法模型的电动助力转向系统的理想设计外文翻译资料
2022-09-29 10:16:10

英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
基于遗传算法模型的电动助力转向系统的理想设计
摘要
在现代汽车中,电动助力转向系统已经逐渐取代传统汽车转向系统,电动助力转向最主要的作用就是节省人力消耗。这篇文章讨论了利用遗传PID算法工具与传统PID模型进行对比去实现减少人力消耗的潜能。将有刷直流电机安装在转向管柱上为驾驶员提供转向力矩。这种结构被称为C型电控助力转向系统。结果显示遗传PID控制器相较于PID控制器能够减少人力消耗。
关键字:电控助力转向系统(EPAS);C型EPAS;遗传PID算法;电动汽车
专业术语
|
Jm |
电机转动惯量 |
|
Bm |
电机阻尼 |
|
Kb |
电机电动势常数 |
|
Ka |
电机力矩 |
|
Km |
电机强度 |
|
L |
电机电感系数 |
|
R |
电机电阻 |
|
Js |
转向轮转动惯量 |
|
Ks |
转向柱强度 |
|
Bs |
齿条阻尼 |
|
Mr |
齿条与车轮总质量 |
|
G |
电机齿轮比 |
|
RS |
齿轮齿条比 |
|
Tc |
传感器测量力矩 |
|
Td |
驾驶员力矩 |
|
Ta |
助力力矩 |
|
theta;S |
转向轮角度 |
|
theta;m |
电机旋转角度 |
1、介绍
电池容量限制一直是电动汽车的主要关注点。因此,大量的研究人员已经做了很多努力去强调在电动汽车系统的附件上能源效率的重要性。机械转向系统或者水压助力转向都不在适应于电动汽车的应用。这是由于水泵的压力需要由电池提供持续的能量。同时需要定期对水压机械系统进行维护。同时,电动助力转向系统只在转向轮转向时消耗能量。并且电动助力转向系统不需要液体介质,更少的机械部件,减少错误力矩输出以及最重要的环境友好。一种典型的电控助力转向系统需要的有转向力矩、汽车速度以及道路情况作为输入参数来通过助力电机提供实时助动力矩。这会在各种操作情景提供最好的转向感觉。被广泛利用的电控助力转向结构有三种;分别被称为柱管型、齿轮型、齿条型。这取决于助力电机的安装部位。转向柱型结构通常装配于装载量在6KN·m的小型轿车。这三种类型的电控助力转向的装载需求见表1
表1:EPAS装载需要
|
EPAS种类 |
汽车尺寸 |
装载 |
|
C型 |
小型 |
6kN |
|
P型 |
中型 |
8kN |
|
R型 |
大型 |
12kN |
电动助力转向的主要部件是电机。所选电机应能产生少的纹波,高效率,低惯性,含有错误转矩容量,小的装载尺寸与质量的平稳转矩。不同的电机种类已经被许多电动助力转向应用的研究人员推荐了,包括直流电机、无刷电机以及永磁同步电机。
2、转向轴型电动助力转向系统的工作原理
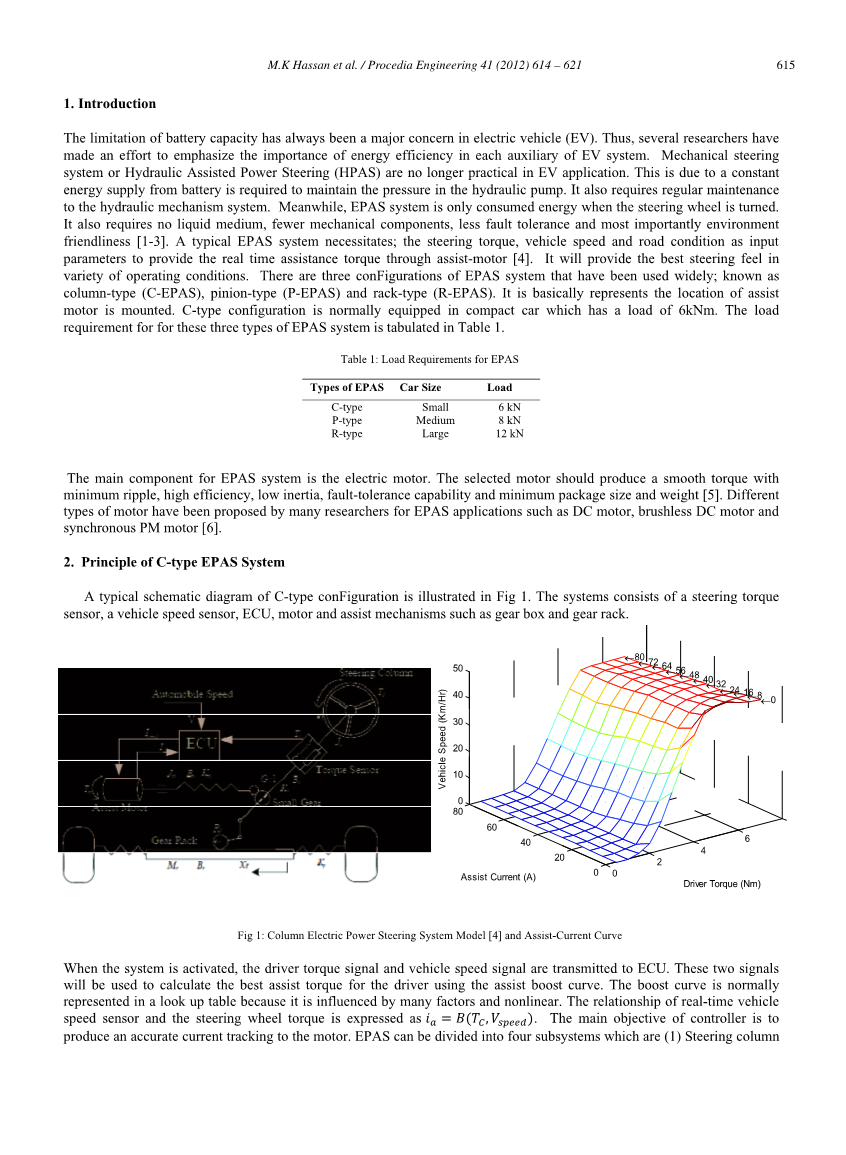
图1所示为一个典型的转向轴电控助力转向的概要图。该系统由转向力矩传感器,车速传感器,ECU,电机以及助力机械如变速箱与齿条。
车速
车速(Km/Hr)
驾驶员转向力矩(Nm)
力矩传感器
小齿轮
助力电机
齿条
转向柱
助力电流(A)
图1:列示电动助力转向系统模型和助力电流曲线
当系统运作起来时,驾驶员的力矩信号与车速信号被传输给ECU。这两个信号根据主力推进曲线用来计算为驾驶员提供的最佳助力力矩。助力曲线通常利用查找表,因为他受很多因素及非线性的影响。实时车速传感器与车轮转矩的关系用公式表示。控制器的主要目标是对电机进行准确实时跟踪。P电控助力转向系统可以被分为四个子系统,分别是转向轴及驾驶员力矩、助力电机、装载情况及摩擦、齿轮齿条。等式(1)-(9)表示每个子系统的关系。如图2所示这个模型利用MATLAB/Simulink进行仿真。图2所示的转向轴电动助力转向系统的数学模型是根据牛顿动量定理推倒及发展的。所有该仿真所用到的参数都来自参考4,在这篇文章里,BCGA-PID被运用到闭环结构。从助力曲线到电机的目标流与电机实际输出流进行对比。
图2:C型EPAS系统Simulink模型
转向柱,驾驶员力矩
|
(2.1) |
||
|
(2.2) |
||
|
(2.3) |
助力电机模型
|
(2.4) |
||
|
(2.5) |
||
|
(2.6) |
||
|
(2.7) |
||
|
(2.8) |
路面状况及摩擦
|
(2.9) |
齿条与小齿轮位置
|
(2.10) |
3、遗传算法
遗传算法是基于导致人口数结果的自然选择和遗传的一个通用的最优化算法。一个合适的容量,起源于问题的目标函数用来分配人口中的每个成员。个别表现更好的结果的函数会获得更高的匹配价值,因此能够让他们存活更多代。开始以最初的随机人口,成功的种群世代被基因遗传算子所创造,交叉与变异来得到更好的能达到问题的最优解的结果。遗传算法重复上述步骤,直到满足预定条件。在遗传算法中,所有感兴趣的变量必须被编码为二进制数(基因)和一组二进制数进一步形成串(染色体),这表示被称为二进制编码的遗传算法(BCGA)。在一个二进制码遗传算法之后,最终的二进制码被编译为原始实数。遗传算法保留一组染色体,称之为种群,去探索研究领域以及解决问题。在每一代中,根据预定义目标函数来评估每一个染色体的表现合适程度检测与结果是否接近。交叉与变异的遗传算子在二进制码遗传算法中用来产生新的个体种群。这个过程将持续直到问题解决或者达到重复次数达到最大值。更过的细节可以在参考6中找到。四个决定性的参数影响遗传算法的表现。种群大小、代数、交叉率以及变异率。大的种群规模和多的遗传代数增加获得全局最优值得可能性,但极大的延长进程时间。交叉在二进制码遗传算法中用来产生新的染色体。这需要两条染色体交换他们的部分染色体信息去产生新的染色体。交换点是随机选择的。最简单的交叉型式是单点交叉。在二进制遗传算法中变异算子与变异概率随机应用。PM保证不会出现搜寻任何一种已给选择的概率为零。同时保护优良基因在选择与交叉的过程中不丢失。二元突变翻转的位的值在选定的点突变位点。这样的变异通常统一应用于整个种群链,所以给定二进制字符串有可能多点变异。
4、PID控制器
PID控制器作为一个基因控制机器被广泛应用于工业控制系统。自介绍,传统的PID控制被广泛地应用于化学与造纸工业,有约97%的控制器有PID结构。这源于他的低成本,低的维护费用以及控制器设计与操作简单。这款控制器的广泛应用使得对寻求PID控制器参数最优解的研究继续深入,如基于追踪、错误与基点配置的PID控制器的经典谐调理论。不幸,的是,调谐PID控制器很难准确接受因为许多工业工厂经常由许多复杂问题组成,类似于更高的命令,时间延时和非线性。对于谐调PID控制器经典科技有一些缺点,对于接受信号有过多的法则、闭环动态响应不足、对非线性问题解决的困难、控制设计的数学复杂性。为了解决这些难题,许多优化传统PID控制器类型出现了,有自动调谐和只能PID控制器最近发展起来了,以改进传统模式下PID控制器参数。因此,二进制码遗传算法最优解模式能通过在闭环环境中减少摆动,提供参数谐调,如图3。
BCGA调谐
机械
PID
控制器
图3:适用于EPAS的带BCGA调谐机械的PID控制器
理想设置点与实际输出的插值被记为错误。
|
(3.1) |
Y是实际epas信号,yt是校准EPAS预期信号。均方值错误根据最优解程序目标方程,的定义。换句话说,参数应该被估计为均方值错误趋于零。
|
(3.2) |
N表示数据点的个数。有一些标准目标方程通常作为计算过程方程。在这些方程里均方值错误目标方程是最重要的。这和目标方程在评估问题使用频繁因为考虑到未知参数的无偏估计。这个目标函数为二次函数,作为数据集的平均值来估计,和减少为了优化考虑造型设计。因此,将均方值错误作为目标方程。已使用MSE作为自己作品中的计算智能优化目标函数的研究中的有。
5、结论与讨论
主要关注的是调整PID及GA-PID两种不同的控制算法的能量消耗。助力电机的控制方案结构如图4。齿条的运动是驾驶员力矩,助力电机减去路面与摩擦模型之和。路面与摩擦的模型如等式9.
初步测试是为了证明所有参数的PID控制器和修正电动助力转向系统的能量消耗的潜能。PID控制器只提供好的控制信号和对控制信号相应的能力。这个模拟是在车速40KM/H和分配随机的驾驶员力矩数值的条件下进行的。PID控制器能够控制需要的助力信号给电机。然而PID参数是根据循迹与错误模型的,需要花费长时间的过程。
因此,通过介绍二进制码来优化PID能够促进协调过程。BCGA能够比所有的PID参数有更快的的协调过程。因此在第三节出现的BCGA算法能够变为:
在研究区域随机初始化个体
评估群体的客观作用
重复
给个体赋予适当的值
使用竞争性选择(随机抽样)
应用基因发生器产生新的结果
交叉
变异
评估种群结果
知道满足收敛条件
助力电流(A)
时间(sec)
参考
非控制
图5:PID与自由系统的控制表现比较
BCGA技术在上面介绍中为为电动助力转向系统的GAPID控制器的谐调。BCGA使用的性能参数在表2展示。GAPID控制策略在图6表示,可以看出与PID控制器输出没有太多不同。但是放大后可以看出GAPID能够更好的展现出控制表现。GA-PID与P
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[150299],资料为PDF文档或Word文档,PDF文档可免费转换为Word



