基于相机标定的相机固有参数计算的新方法外文翻译资料
2022-09-24 10:28:47
A NOVEL TECHNIQUE FOR ESTIMATING INTRINSIC CAMERA PARAMETERS IN
GEOMETRIC CAMERA CALIBRATION
基于相机标定的相机固有参数计算的新方法
Swapna P., N. Krouglicof and R. Gosine
摘要:在机器视觉领域,对于一个给定的机器视觉系统的分析模型,摄像机标定指的是一组描述图像形成过程的参数的实验测定,。一套完整的校准参数包括描述镜头-相机-构架整套捕获工具的内在参数以及使相机的位置和方向和固定坐标系关联的外在参数。在本文中,针对相机标定提出了一种新的方法,在该方法中对像素中心和焦距进行了独立于光学畸变的计算。本文进行了一个可行的实验用于证实这个方法。实验结果表明,这种技术有潜力提升标定的精度。本文还比较了通过新技术获得的结果和应用Heikkila提出的常用的相机标定算法获得的结果,两次都使用的同一套设备。
关键字——相机标定;准确性;3D球形目标;参数估计;试验台
介绍
机器视觉(Machine Vision)是当前时代的先进技术之一。在机器视觉领域,相机标定是指一组描述对于给定的机器视觉系统分析模型的图像形成过程的参数的实验测定。一套完整的标定参数包括相机的内部(室内射影)参数和相机的外部(外部投影)参数。内在参数指的是那些描述镜头-相机-构架捕获工具的组合,外在参数指的是那些使相机的位置和方向与固定参考系关联的参数。假如你透彻理解了图像的形成过程,那么就会知道相机参数估算所需的精度要求在许多机器视觉的应用中是至关重要的,即3D对象坐标和相应的2D图像坐标之间的关系。如果相机标定技术是自治的、精确的、通用的和高效的尤其是在用低成本的现有的相机系统和镜头时,那么从2D图像中推测其3D的信息的目的就能够很好地满足。
本文针对相机标定提出了一种新的方法,该方法在忽略镜头失真的情况下分别精确地计算某些相机固有参数包括图像中心和焦距。通过分析一个可行的实验证明了该研究的结论。以前的相关研究工作解决在几何相机标定中的安全性问题[2]通过系统地评估Heikkila提出的相机标定技术[3]。试验设计(DOE)用来更好地理解影响相机标定过程的准确性的主要因素。早期研究展示了该项技术背后的基本原理。试验分析的结果表明,某些相机固有参数如焦距和图像中心与径向和切向畸变强烈耦合(即非常显著的交互作用),从实用的观点来说这使实验的相机标定的执行非常困难。基于这些研究结果,我们提出了一种新技术在忽略镜头失真的情况下估算焦距和图像中心。
本文的内容结构如下:第二章主要是通过对试验方法学的综述描述提出的方法和对使用的实验设备详细的说明。第三章解释了几何和数学的模型和用于估算图像中心和相机焦距的技术。然后是试验的结果的记录,最后得出的相关结论。
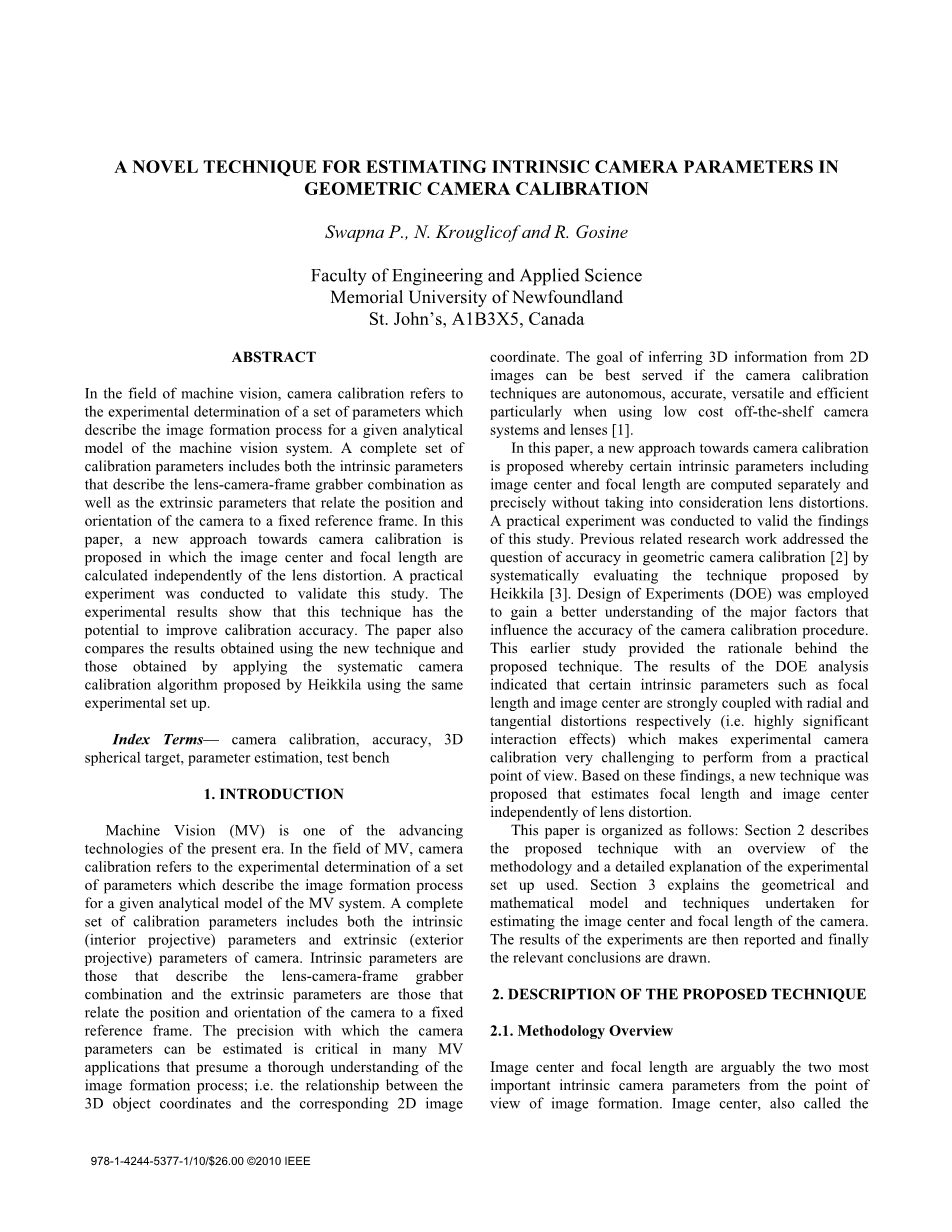
图1.实验装置
第二章 所提出技术的说明
2.1.方法概述
从成像的观点来看,图像中心和焦距无可争议地可以说是两个最重要的相机固有参数。图像中心,也被称为主点,是镜头的光轴穿过像平面的交点。焦距是指像平面和镜头的投影中心之间的垂直距离。所研究方法的目的是分别精确地在忽略透镜畸变的情况下计算图像中心和焦距。这是通过在镜头光轴附近的地方测量焦距和图像中心来完成的,因为镜头光轴附近的畸变很小。该技术采用精密陶瓷球体(3D物体)作为校准的对象。图1展示了用来验证该方法的完整实验设备。
2.2.实验设备
实验设备包括由一个精密的x-y工作台、固体成像相机和LED(发光二极管)照明系统组成的校准实验装置和由连接到电脑的单片机控制通过滚珠螺杆机构操纵工作台移动的步进电机驱动装置。测试平台是使用挤压铝型材构造的,带有一个工业相机(Lumenera公司的 Lm135,140万像素的USB2.0工业相机)该工业相机被牢固地安装在测试平台顶端附近,并将方向对准x-y工作台。x-y工作台的位置由两台步进电机驱动步进分辨率达到0.0005英寸/0.0127mm的滚珠螺杆机构来进行控制。在整个操作过程中,该工作台的最大允许位置误差被确定为25mu;m。
基于PIC的单片机板作为测试平台和个人电脑之间的一个接口。该单片机接口的具体功能是精确控制步进电机驱动x-y工作台在测试平台上的移动。这两个电机的是顺时针旋转还是逆时针旋转取决于单片机接口电路的输出信号。图形用户界面(GUI),包括数据采集软件和Lumenera相机驱动程序,该图形用户界面是在MATLAB平台开发的用于获取和处理校准目标的图像。该应用软件不仅使相机校准程序完全自动化而且还有着根据用户的指令去定位x-y工作台和在预定的网格位置获取目标图像的特点。最后图像被存储在用户指定的目录中等待进一步处理。
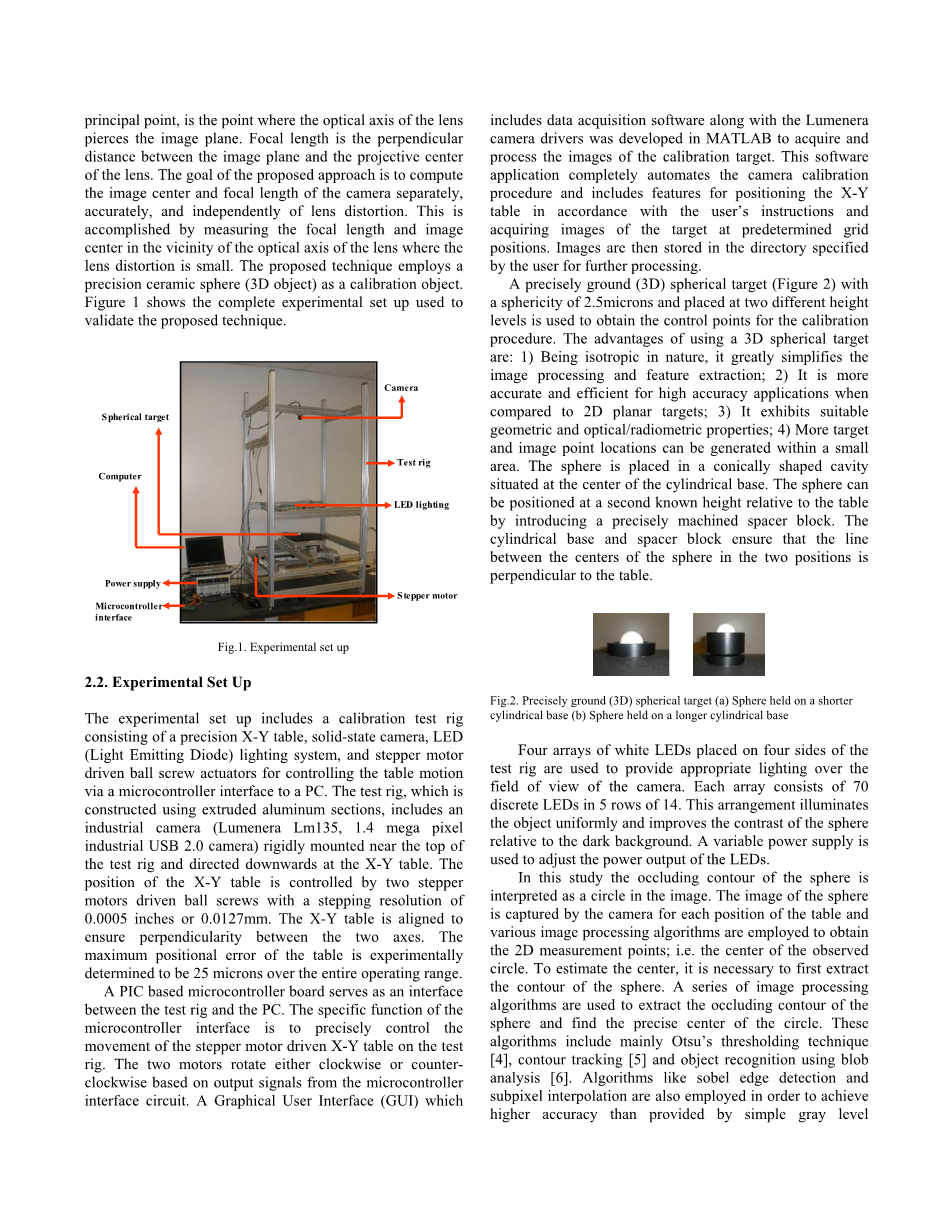
将一个精确的圆球度公差为2.5mu;m的地面球形(3D)目标(图2)放置在两个不同的高度水平用来获取校准过程的控制点。使用三维球形目标的优点是:1)各向同性的性质,它极大地简化了图像处理和特征提取过程;2)和二维平面的目标对比,在高精度的应用中它更精确和高效;3)它展示了良好的几何和光学/辐射特性;4)在小范围内可以产生更多的目标和像点位置。该球体是放置在一个锥形形状的空腔内,该空腔位于圆柱形基座的中心。该球体定位在相对工作台的第二个已知高度通过引入一个机加工过的精确的垫块。上述的圆柱形基座和垫块需要保证两个不同高度的球体中心点连线与工作台是垂直的。
放置在测试平台四周的四组白色LED光源是用来给相机的视野范围提供合适的照明。每组LED光源包含70个独立的发光二极管,分为5行每行14个。这种照明方式能够均匀的照亮物体,还能提升球体与黑暗背景的对比度。一个可变输出电源用于调节LED的输出功率。
在本项研究中,球体的封闭轮廓在图像中被看做为一个圆。对于工作台的每一个位置的球体的图像都被相机获取,使用多方向图像的处理算法来获得二维平面的测量点,即观察到的圆的中心。为了得到中心点,首先需要提取球体的轮廓。一系列的图像处理算法用来提取球体的封闭轮廓曲线,找到圆的精确的中心点。这些算法主要包括大津阈值技术[4],轮廓跟踪[5]和使用blob分析进行对象识别[6]。为了得到比简单的灰度阈值法更高的精度,本文还使用了Sobel边缘检测和亚像素插值法。通过MATLAB平台利用非线性最小二乘法分析匹配一个非线性模型上的试验数据点。文献[7]综述了以上所使用的图像处理技术。
该方法的第一步就是调整球体的位置使之位于两个不同的高度水平从而确定相机的大致图像中心。第一步可以通过使用一个更短的圆柱体基座获取球体的图像而在相同的x-y坐标位置使用更高的圆柱体基座获得更高高度水平的球体图像来实现。计算每个图像里的圆心位置,然后基于这些结果,用系统的方式反复地调整工作台的X和Y坐标直到这两个图像的圆心是一致的。如果像平面是和x-y工作台平行的,那么由简单的几何学原理可知两圆之间的一致点和相机的图像中心是相同的;即在球体所在空间的圆心是在相机的光轴上。需要注意的是,在这个特殊的位置,由于对称性可以有效地忽略径向畸变。如果像平面和x-y工作台不平行,那么需要添加额外的球体位置和稍微复杂些的几何模型才能计算出准确的相机图像中心和焦距。
第三章 相机图像中心和焦距的估算
3.1.几何和数学模型
在现实世界中,物体平面(即x-y工作台)和图像平面可能不是完全平行。因此如图3所示,一旦这些球体被放置好,获得的结果仅仅提供相机的图像中心的近似值(图像中心的X坐标,X0)。本文中提出的方法还涉及考虑到球体的n个方向的正或负的相对于已调整好的球体的位移。为了解决图像中心的X轴向分量,将球体沿着工作台的X方向移动已知的增量距离W取代之前预定的对齐的球体位置。同样的,为了消除图像中心的Y轴向分量,通过重复上述过程,将球体沿着工作台的Y方向移动。为了更高效地产生数学模型,球体的位移要准确的沿着工作台的X方向,如图3所示。在这种情况下,像平面被假设成为一维的,并且图像上的点的X坐标落在一条直线上。在像平面上的每一个坐标代表了圆的中心,即通过像章节2.2中的描述的一样处理每一幅图像,那么球体的图像就能够被确定。
如图3所示,通常情况下我们假定像平面相对于工作台是不平行的,并有一个小角度称之为lsquo;alpha;rsquo;。投影中心到点X0的距离称作lsquo;Lirsquo;,该距离比真实焦距fnof;要稍长。镜头的投影中心到顶部的已对齐球体中心的距离称为lsquo;Lwrsquo;。两个球体的中心的距离是已知的,在此称之为高度lsquo;Hrsquo;。顶部球体的轴线相对于进行位移lsquo;Wrsquo;后的垂直面的角度称作lsquo;airsquo;,而底部球体与上述垂直面所形成的角度称之为lsquo;aiˊrsquo;。
从数学角度来讲,对于像平面上的沿着工作台的X轴的每一个点alpha;i(i=1......n)都能建立四个方程式:
|
|
(1) |
|
|
(2) |
|
|
(3) |
|
|
(4) |
通过计算球体两个位置的圆轮廓获得二维平面图像上的中心点并称作Xi和Xiacute;,在上述方程中未知的参数是Li、Lw、alpha;、U0、ai和aiacute;。对于每个位移Wi=1..n都有对应的角度ai和aiacute;(i=1..n)。因此对于每一个位移量,都有额外的未知参数ai和aiacute;被添加到已有其他四个未知参数的列表里,即Li、Lw、alpha;、U0,以上四个参数对于所有位移量都是不变的。因此,总的来说,如果有n个位移量,那么对应的就有4n个方程和2n 4个未知参数。如果位移朝向负方向,这四个方程同样有效的。考虑到方程的数量和未知参数的数量,为了解出未知参数,两个位移量是充分必要的。然而,由于数据是有测量误差的。添加更多的位移量是有利于解出所有可获得数据的最佳拟合的参数,为了将一个非线性模型和一组超定的实验数据点匹配(即位移量),我们应用了非线性最小二乘法分析问题。同样的,当工作台沿着Y轴移动时(即垂直于上述工作台的移动),我们用四个非线性方程解出未知参数。点Xi和Xiacute;用Yi和Yiacute;替换,U0也替换成V0。那么方程(3)和方程(4)也就变成了:
|
|
(5) |
|
|
(6) |
在上述方程中,Yi和Yiacute;表示对于Wi=1..n位移量图像点相对应的的Y坐标。V0代表图像中心的Y坐标值。一旦Li和alpha;被计算出来,那么焦距fnof;也能通过方程(7)计算出来。
在上述方程中,要想解出未知参数,2个位移量是充分且必要的。但是考虑越多的位移量,那么参数值计算得更加精确。因此,基于这个观念,我们通过考虑在正反两个方向的各50个位移量来验证结果,通过仿真我们得出了比较好的未知参数值。然后将这个结论应用在实验上。
3.2.实验
就像之前说描述的,提出的方法的第一步是将球体放置在两个不同的高度来确定相机图像中心的近似位置。我们发现当球体对齐摆放好后,底部和顶部球体的像素点近似坐标分别为(712.6894,429.8865)和(712.5424,429.4762)。一旦球体对准完毕,程序将在同一个X-Y点重复执行几遍来确认结果正确。表1给出了几次实验运行的结果。X0和Y0表示(近似)图像中心的X和Y图像坐标值,R表示在像平面上获得的圆的半径。结果大致一样,但由于图像的噪声会出现小变化。事实表明,多个图像能够有效降低噪声,这是下一步实验的基础。
采取的下一步是将球体沿着X和Y轴的正负方向移动。球体同样地被放置在两个不同的高度水平。根据早先说明的,对于两个高度我们都相对于初始位置沿着X和Y轴的正负方向各移动了50次。
相机在各个位置都要拍一张图像,因此总共有400张图像。这些图像被存储在电脑里待进一步的处理,这些处理包括一系列的处理算法另外还有计算图像坐标中心的数值算法[7]。然后将有着亚像素精度的像素中心坐标乘以相机的像素尺寸来获得Xi、Xiacute;和Yi、Yiacute;坐标。这400个点之后用来计算未知参数。(即Li、Lw、alpha;、U0、ai和aiacute;,位移量Wi=1..n在X方向上;Li
剩余内容已隐藏,支付完成后下载完整资料
英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[147952],资料为PDF文档或Word文档,PDF文档可免费转换为Word



