基于轮毂电机的电动汽车横摆稳定性控制方法研究开题报告
2020-02-20 09:40:01
1. 研究目的与意义(文献综述)
| ①选题意义和背景 随着现代科学技术的发展,科技创新与科技研究的高速化普及,人们对交通生活的快捷性和高效性提出更高的要求。不仅如此,气候、能源和环境问题是人们长期共同面对的长期问题。因此,电动汽车代替普通燃料汽车逐渐成为一种趋势。基于轮毂电机的纯电动汽车省略了大量传动部件,节省安装空间,让车辆结构更简单,提高系统效率。对于传统燃油车辆来说,离合器、变速器、传动轴、差速器乃至分动器都是必不可少的,而且这些部件不仅较重、使得车辆的结构更加复杂,同时也存在需要定期维护和故障率的问题;另外,轮毂电机可以实现多种复杂的驱动形式。由于轮毂电机具备单个轮胎独立驱动的特性,所以无论是前驱、后驱或是四驱形式,它都可以比较容易的实现同时轮毂电机可以通过左右车轮的不同转速甚至反转实现类似履带式车辆的差动转向,大大减小车辆的转弯半径,在特殊情况下几乎可以实现原地转向;而且它还易于采用多种新能源技术,无论是纯电动还是燃料电池电动车,或是增程电动车都可以采用轮毂电机作为主要驱动力,这些优点使得轮毂电机电动汽车更加主动化和智能化。 主动安全性是汽车的重要性能之一,并且操纵稳定性直接影响着汽车的主动安全性.传统汽车通过驱动防滑系统(Traction Control System, TCS) 、车身电子稳定系统(Electronic Stability Program, ESP)、制动防抱死系统(Antilock Brake System, ABS),利用差动制动的方式实现直接横摆力矩控制(Direct Yaw-moment Control, DYC)从而改善汽车的侧向、纵向和垂直动力学特性来提高电动汽车的操纵稳定性和主动安全性,但制动系统的介入会影响车辆的驾驶人的正常驾驶感受和车辆的加速性能。然而基于轮毂电机驱动的电动汽车以其各个车轮的驱动/制动力矩来实现更精确、更快速的独立控制,因而更有利于实现车辆的直接横摆力矩控制[1]。 ②国内外研究现状 车辆的横向动力学运动决定车辆的稳定性,横摆稳定性控制系统在横向动力学控制中作用非常突出。 2002 年,日本东京农工大学 MasaoNagai 采用集中式结构研究了主动前轮转向和直接横摆控制的集成控制策略,采用模型匹配控制方法,对横摆角速度和质心侧偏角期望值进行跟踪,利用优化控制理论设计前馈和反馈补偿器给予补偿,计算控制所需的主动转向角和横摆控制力矩,与仅由直接横摆力矩控制相比,通过主动转向和直接横摆控制的集成控制提高了车辆的操纵稳定性,并在一些恶劣的行驶条件下具有较强的鲁棒性[2]。 2012 年,Cho W 等人设计了一个 AFS 和 ESP 的分层集成控制系统,其中上层监督器决策出期望的横摆角速度和纵向车速,控制器决策出期望的横摆力矩和期望的纵向力,协调器协调 AFS 和 ESC 产生期望的横摆力矩和纵向力,并通过“人-车-控制器”对其进行闭环仿真实验,验证控制策略对提高车辆敏捷性、可操作性和车辆横向稳定能力的有效性[3]。 清华大学的晏蔚光等人在线性二自由度车辆模型的基础上设计了一种前馈——反馈复合控制结构,将直接横摆力矩控制和主动前轮转向控制相结合以提高制动稳定性.控制器将前轮转向角视为输入,将外部侧向干扰力和力矩作用视为扰动,通过前馈校正补偿转向角引起的状态变化;同时建立扰动状态观测器,采用反馈控制校正消除外部扰动引起的状态误差.仿真试验证实这种控制方法在提高制动稳定性方面有良好的效果[4]. 吉林大学陈虹教授课题组在基于模型预测控制理论对主动前轮转向和直接横摆力矩的集成控制进行了深入研究,文献[5]以传统汽车为研究对象,其集成控制结构分为两层,高层控制器根据车辆实际状态与期望状态的误差决策得到附加前轮转角和附加横摆力矩,底层控制器根据最有效车轮原则将附加横摆力矩施加在单个车轮上;文献[6]以分布式电动汽车为研究对象,设计不分层的集成控制器直接根据期望车辆状态决策出附加前轮转角,并根据相应控制目标直接决策出四个车轮的轮胎力,并通过实验验证控制策略对提高车辆操纵稳定性的有效性。 吉林大学[7]在研究过程中将智能车辆底盘综合运动控制分解为纵向运动控制和横向运动控制两部分。针对纵向运动控制,设计了主动巡航控制策略。在主动巡航策略设计时,借鉴预瞄控制的思想来提高自动巡航控制的跟踪精度和安全性,并通过模糊理论实现控制参数的自整定。其次,在保证系统安全可靠的前提下,将再生制动控制考虑到主动巡 II 航控制中,提高车辆的能量利用率以延长续驶里程。采用了速度控制,车距保持控制,前车切入和前车切出四种典型工况对主动巡航策略的跟踪精度和可靠性进行了仿真验证。 在横向运动控制中,重点研究了车辆的轨迹跟踪以及直接横摆力矩控制问题。采用最优预瞄控制实现车辆的轨迹跟踪,将预瞄点处的横向误差作为反馈信号。为了提高轨迹跟踪的精度以及车辆转向稳定性,设计了基于轮毂电机差动驱动/制动的直接横摆力矩控制(DYC,DirectYaw Control)策略。同时,为了提高整车可靠性,利用 DYC 的思想实现了四轮轮毂驱动电动汽车在单个轮毂电机故障时的容错能力。通过角阶跃转向工况和双移线工况对算法的控制效果和可靠性进行了仿真验证。 对比分析表明传统汽车与四轮轮毂驱动电动汽车的集成控制思路是一样的,只是两者的实现方式不同而已。同时,对比各类集成控制方法,模型预测控制自身滚动优化的特点使其很好地应用于汽车稳定性研究,有效克服了系统中的非线性与不确定性,具有较强的鲁棒性,有利于进一步提高车辆的稳定性和主动安全性。 |
[1] 杨慎. 轮毂电机驱动电动汽车横摆稳定性集成控制方法研究. 2017.3
[2] Nagai M,Shino M, Gao F. Study on integrated control of active front steer angle anddirect yaw moment[J]. Jsae Review. 2002. 3
[3] Cho W,Choi J, Kim C, et al. Unified Chassis Control for the Improvement of Agility, Maneuverability, and LateralStability[J]. Vehicular Technology IEEE Transactions on, 2012, 3
[4] 晏蔚光, 陈全世. 一种基于前馈--反馈复合控制方式的制动稳定性控制方法[J]. 信与控制, 2005, 1
[5] Ji Y,Guo H, Chen H. Integrated control of active front steering and direct yawmoment based on model predictive control[C]. Control and Decision Conference , 2014.6
[6] Ren B, Chen H, Zhao H, et al. Integrated control of in-wheel-motored electric vehicles using a model predictive control method[C] Intelligent Control and Automation (WCICA), 2014 11th
[7] 崔祥坡. 智能轮毂驱动电动汽车底盘综合运动控制策略研究[C].2018.
2. 研究的基本内容与方案
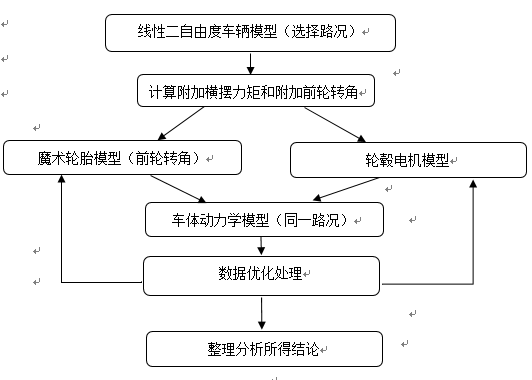
| 2.1研究基本内容 (1)国内外电动车横摆稳定性控制研究现状。 (2)建立电动汽车的车辆动力学模型,基于理想二自由度模型进行横摆稳定性的关键因素分析。 (3)基于车辆横摆稳定性的分层控制策略研究。 (4)在matlab/simulink针对不同工况进行横摆稳定性控制仿真验证研究。 2.2目标 通过对四轮轮毂电机的电动汽车横摆稳定性的研究,对其关键因素进行分析验证,对每个车轮的轮胎力进行优化分配从而发挥其动力学控制的潜力与优势,对进一步改善汽车的稳定性具有重要意义。 2.3采用的技术方案及措施 2.3.1建立电动汽车动力学模型 建立满足课题所需的包含车身纵向、侧向和横摆运动,以及四个车轮回转运动的七自由度非线性车辆动力学模型。 其中包括以下几个模型: 1.车体动力学模型:车体有侧向、纵向、横摆三个自由度,与传统的简化三自由度刚体模型一致;在 Matlab/Simulink 的环境下搭建整车模型。 2.轮胎模型:车辆系统所受的唯一外力来自于轮胎,是车辆运动的直接原因,同时车辆横摆稳定性的控制是通过对轮胎力的控制来实现的。采用由荷兰 Delft 理工大学[8]的 H.B.Pacejka 教授提出了“魔术公式”轮胎模型。 3.车轮旋转动力学模型[9]:当车辆运动时,由于纵向和侧向加速度引起的车身俯仰和侧倾运动均会导致轮胎载荷发生变化,这部分载荷为动态载荷;车辆处于静止状态时,轮胎的载荷只与车辆的质量和质心位置有关系,这部分载荷为静态载荷。轮胎的纵向载荷应由静态载荷和动态载荷两部分组成。 4.轮毂电机模型:电机模型采用能够体现其特性的简化模型。轮毂电机的具体参数需要根据整车的动力性设计指标进行参数匹配计算。汽车的动力性主要评价指标为汽车的最高车速、汽车的加速时间和汽车的最大爬坡度[10]。轮毂电机的主要特征参数有额定功率与峰值功率、额定转速与最高转速、额定转矩与最大转矩,需要满足汽车在任何行驶工况下的要求。 2.3.2横摆稳定性控制方法研究 1.以四轮轮毂电机驱动电动汽车为对象,从车辆横摆稳定性控制角度出发,对 AFS与DYC 的集成控制方法进行研究,进一步提高操纵稳定性和主动安全性。 2.采用分层控制结构形式,对主动前轮转向(AFS)和直接横摆力矩(DYC)的集成控制系统进行研究。 3.上层动力学控制算法:上层控制器以横摆角速度和质心侧偏角为控制变量,选用线性二自由度车辆模型作为参考模型,基于模型预测控制理论计算跟踪车辆期望状态保证车辆稳定性控制所需的附加横摆力矩和附加前轮转角; 4.下层控制器转矩分配算法:将上层控制器决策得到维持车辆稳定性的附加横摆力矩实时地分配给轮毂电机。 2.3.3仿真验证 进行仿真验证。为验证控制系统的有效性,分别依据 ISO 7401-2011《车辆横向瞬态响应开环实验》[11]与 GB/T 30677-2014《轻型汽车电子稳定性控制系统性能要求及试验方法》[12]进行方向盘单周期正弦输入实验和方向盘正弦延迟输入实验。三种工况如下:工况 1:高附路面正弦转向实验;工况 2:低附路面正弦转向实验;工况 3:高附路面正弦延迟转向实验。
图1.技术路线 |
[8] 喻凡,林逸.汽车系统动力学[M]. 机械工业出版社, 2005.
[9] Zhenpo Wang ; Junjun Zhu ; Lei Zhang ; Yachao Wang, et al. Automotive ABS/DYC Coordinated ControlUnder Complex Driving Conditions[C] 2018
[10] 余志生.汽车理论第5 版[M]. 机械工业出版社, 2009.
[11] ISO-International Organization for Standardization. Road vehicles — Lateral transient response test methods —Open-loop test methods. ISO 7401-2011, 2011.
[12] GB/T30677-2014. 轻型汽车电子稳定性控制系统性能要求及试验方法[S]. 北京:中国标准出版社, 2014.
3. 研究计划与安排
| 周次 | 工作内容 | 提交内容 |
| 20 7学期 | 选题,校内资料搜集 | 毕业设计任务书 |
| 8 学期第1周 | 方案构思、文献检索、完成开题报告 | 文献检索、开题报告 |
| 8学期第2-3周 | 外文翻译、资料再收集 | 外文翻译 |
| 8学期第4-6周 | 设计计算、草图绘制 | 设计计算草稿、草图 |
| 8学期第7-9周 | 图样绘制、编写设计计算说明书(论文)、预答辩 | 图样、论文初稿 |
| 8学期第10-12周 | 图样及设计计算说明书整理、资料袋整理,答辩资格审查 | 正式图样、论文 |
| 8学期第13周 | 学生提出答辩申请,并作答辩准备;教师审阅图纸、说明书 | 毕业设计资料袋 |
| 8学期第14-15周 | 参加答辩 | |
4. 参考文献(12篇以上)
| [1] 晏蔚光,陈全世.一种基于前馈--反馈复合控制方式的制动稳定性控制方法[J].信息与控制,2005,34(1):26-29,34. [2] 崔祥坡. 智能轮毂驱动电动汽车底盘综合运动控制策略研究[D].吉林大学,2018. [3] 杨慎. 轮毂电机驱动电动汽车横摆稳定性集成控制方法研究[D].重庆理工大学,2017 [4] 张志勇,张风,黄彩霞, 等.轮毂电机驱动电动汽车的转向性能优化[J].汽车工程,2018,40(10):1206-1214. [5] 余卓平,姜炜,张立军.四轮轮毂电机驱动电动汽车扭矩分配控制[J].同济大学学报(自然科学版),2008,36(8):1115-1119. [6] 余卓平,高晓杰,张立军.用于车辆稳定性控制的直接横摆力矩及车轮变滑移率联合控制研究[J].汽车工程,2006,28(9):844-848. [7] 张润生, 张伟, 张思龙等. 轮毂电机驱动汽车横摆侧倾稳定性联合控制[J]. 北京理工大学学报, 2018, 第38卷():200-204. [8] 李以农,胡一明,邹桃.轮毂电机驱动电动汽车横摆稳定性控制[J].重庆大学学报,2017,40(12):24-34 [9] 阳贵兵,马晓军,廖自力, 等.轮毂电机驱动车辆双重转向直接横摆力矩控制[J].兵工学报,2016,37(2):211-218. [10] 钟国旗,刘志远,何朕, 等.基于分布式预测控制的轮毂电机电动汽车横摆稳定控制[J].电机与控制学报,2018,22(7):107-117. [11] 赵婷婷. 基于有限时间的轮毂电机电动汽车车道保持算法及稳定性控制[D].杭州电子科技大学,2018. [12] 谢宪毅. 分布式电动汽车操纵稳定性集成控制方法研究[D].吉林大学,2018. [13] 苏朋军. 轮毂驱动汽车主动安全控制方法研究[D].哈尔滨工业大学,2017. [14] 王东涛. 轮毂电机驱动电动汽车转向工况下的转矩分配策略研究[D].长沙理工大学,2017. [15] 孙晓文. 汽车横摆力矩控制与差动助力转向的可拓协调控制[D].合肥工业大学,2017. [16]欧健,胡经庆,杨鄂川, 等.基于横摆力矩控制的电动汽车横向稳定性研究[J].机械设计与制造,2016,(4):182-185. [17] 苏健. 电动轮汽车EPS与DYC集成控制策略研究[D].江苏大学,2017. [18] 王明玉. 分布式驱动电动车直接横摆力矩控制研究[D].哈尔滨工业大学,2016. [19]汪振. 基于轮毂电机驱动电动汽车的主动悬架和驱动力分配的联合控制研究[D].东南大学,2016. [20]王超. 四轮独立驱动轮毂电机电动汽车横摆力矩控制研究[D].辽宁工业大学,2015. [21] 余志生.汽车理论第5 版[M]. 机械工业出版社, 2009. [22] Cho W, Choi J, Kim C, et al. Unified ChassisControl for the Improvement of Agility, Maneuverability, and LateralStability[J]. Vehicular Technology IEEE Transactions on, 2012, 3 [23] Nagai M, Shino M, Gao F. Study on integratedcontrol of active front steer angle and direct yaw moment[J]. Jsae Review.2002.3 [24]Farzad Tahami , Shahrokh Farhangi amp; Reza Kazemi. A Fuzzy LogicDirect Yaw-Moment Control System for All-WheelDrive Electric Vehicles[J] VehicleSystem Dynamics: International Journal of Vehicle Mechanics and Mobility.2010.8 [25]Motoki Shino amp; Masao Nagai. Independentwheel torque control of small-scale electric vehicle for handling andstability improvement[D]. 2003.4 [26] Ji Y, Guo H, Chen H.Integrated control of active front steering and direct yaw moment based onmodel predictive control[C]. Controland Decision Conference , 2014.6 [27] Ren B, Chen H, Zhao H, et al. Integrated control of in-wheel-motored electric vehicles using a model predictive control method[C] Intelligent Control and Automation (WCICA), 2014 11th [28] Yan Chen; Junmin Wang ; Design and Evaluation on Electric Differentials for Over actuatedElectric Ground Vehicles With Four Independent In-Wheel Motors; 2012.2 [29] K Sawase, Y Ushiroda, T Miura. Left-righttorque vectoring technology as the core of super all wheel control (S-AWC).2006 [30] A. Watts, A. Vallance, A. Whitehead, TheTechnology and Economics of In-Wheel Motors 2010-01-2307 [31] Feng jiaoJia Zhiyuan Liu Hongliang Zhou TingTeng, A Robust Control Invariant Set Approach to Yaw Stability of Four-WheelDrive Electric Vehicle, 2018.10 |



