基于自动代码生成的无人车辆运动控制毕业论文
2021-12-06 20:44:58
论文总字数:42646字
摘 要
随着科技水平的提升,汽车的功能日趋多样,汽车电控软件的代码量也急剧增加,自动代码生成技术以其产品开发周期短、后期维护成本低等显著优势,一经出现便成为市场主流;运动控制,作为当前对无人车辆研究的重要领域之一,形成的诸多控制理论有效地推动了无人车辆的发展,为智能交通体系的构建提供了理论基础和技术支持。本文是围绕将自动代码生成技术应用于无人车辆运动控制器的嵌入式开发中而展开的。
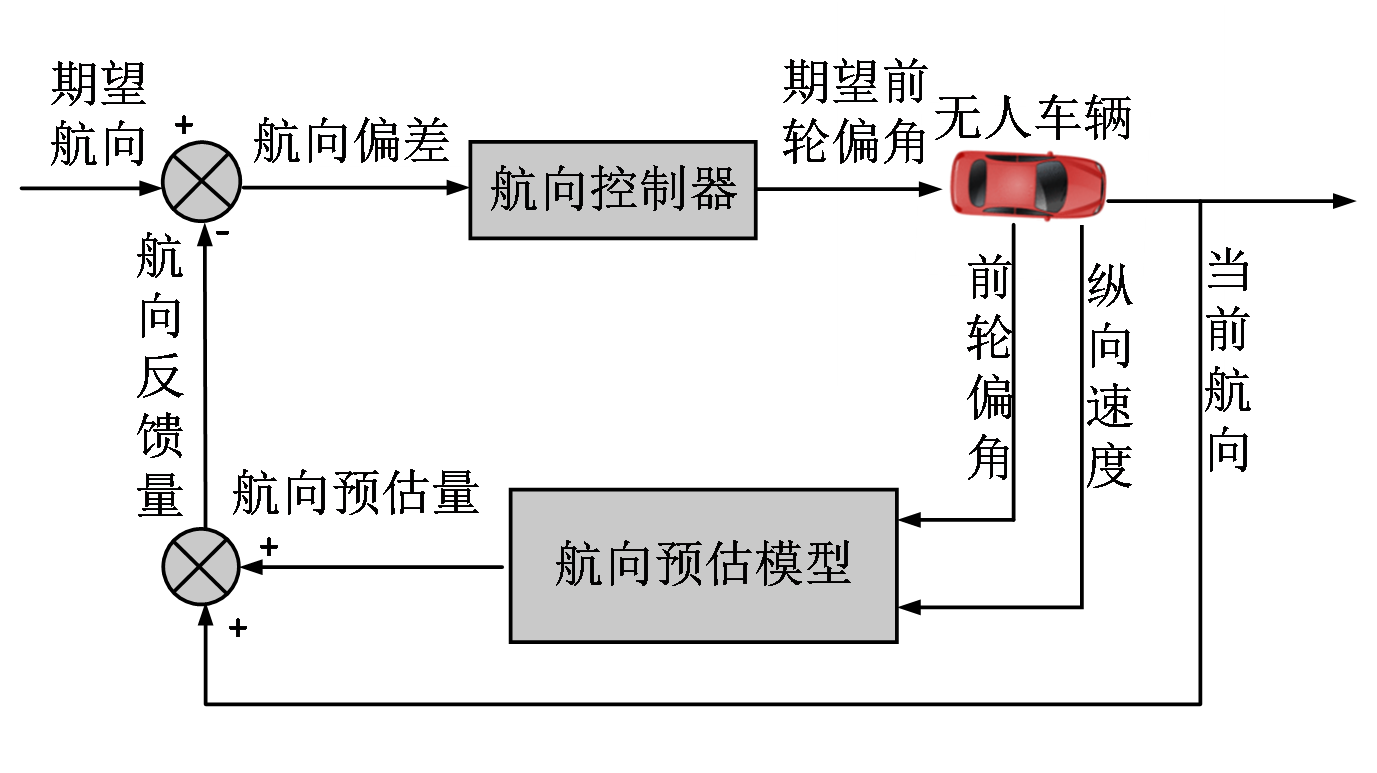
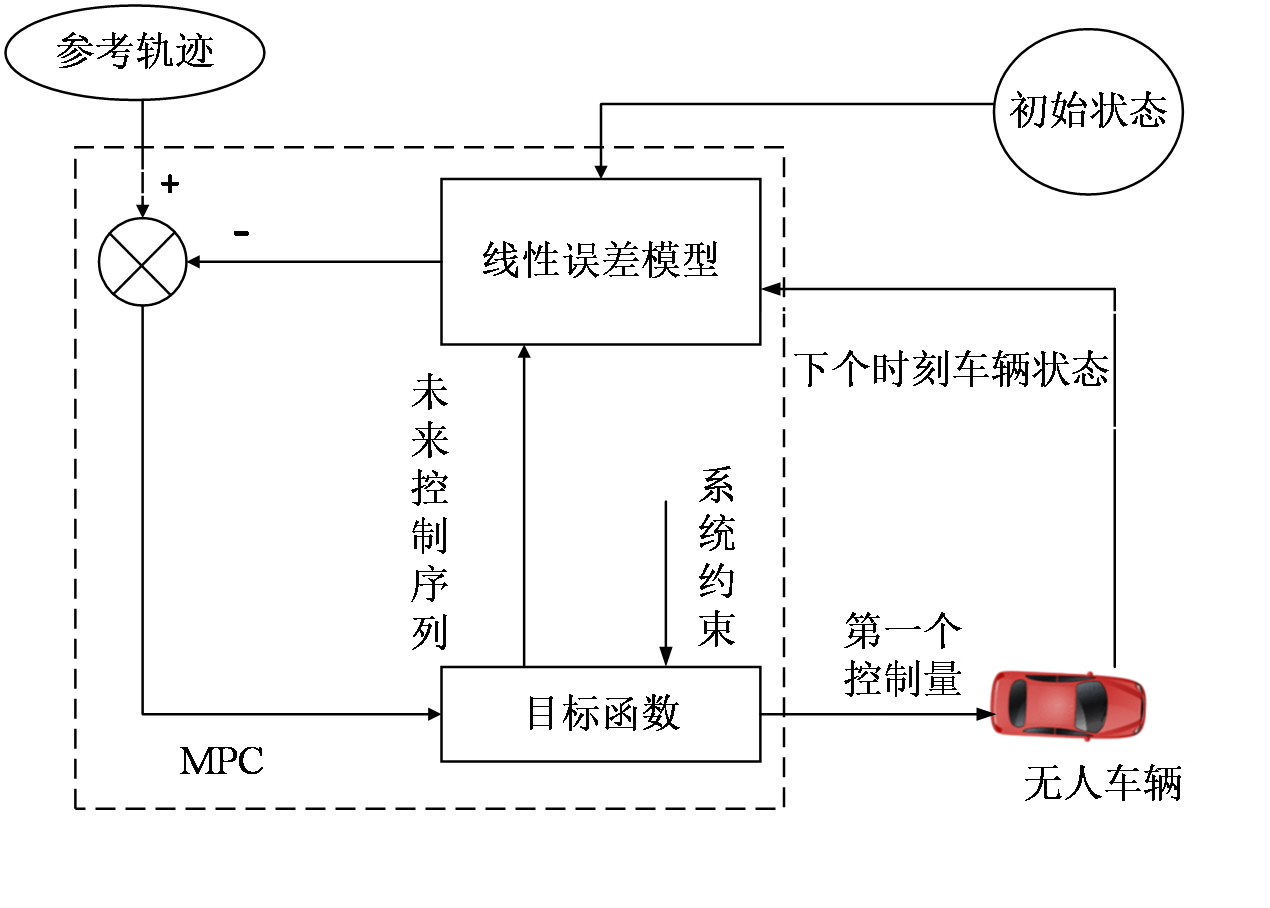
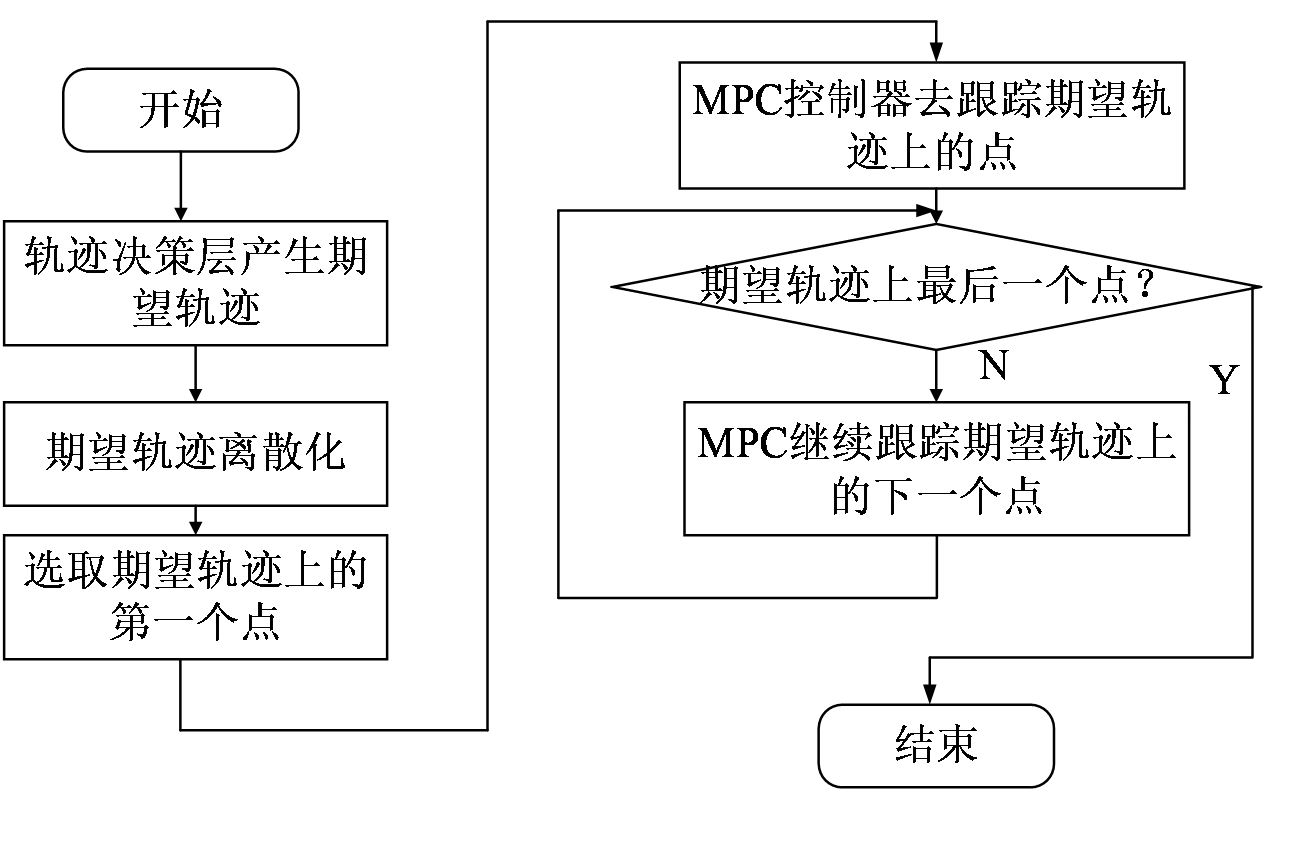
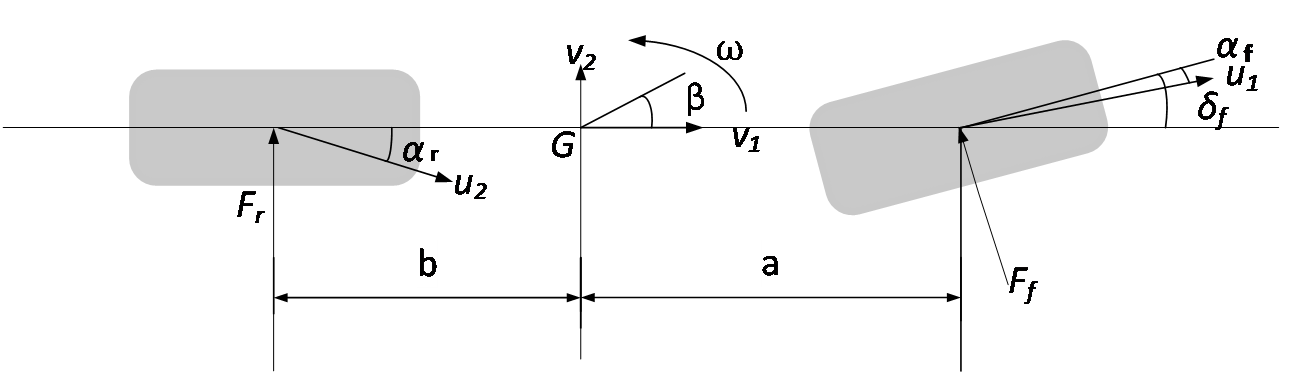
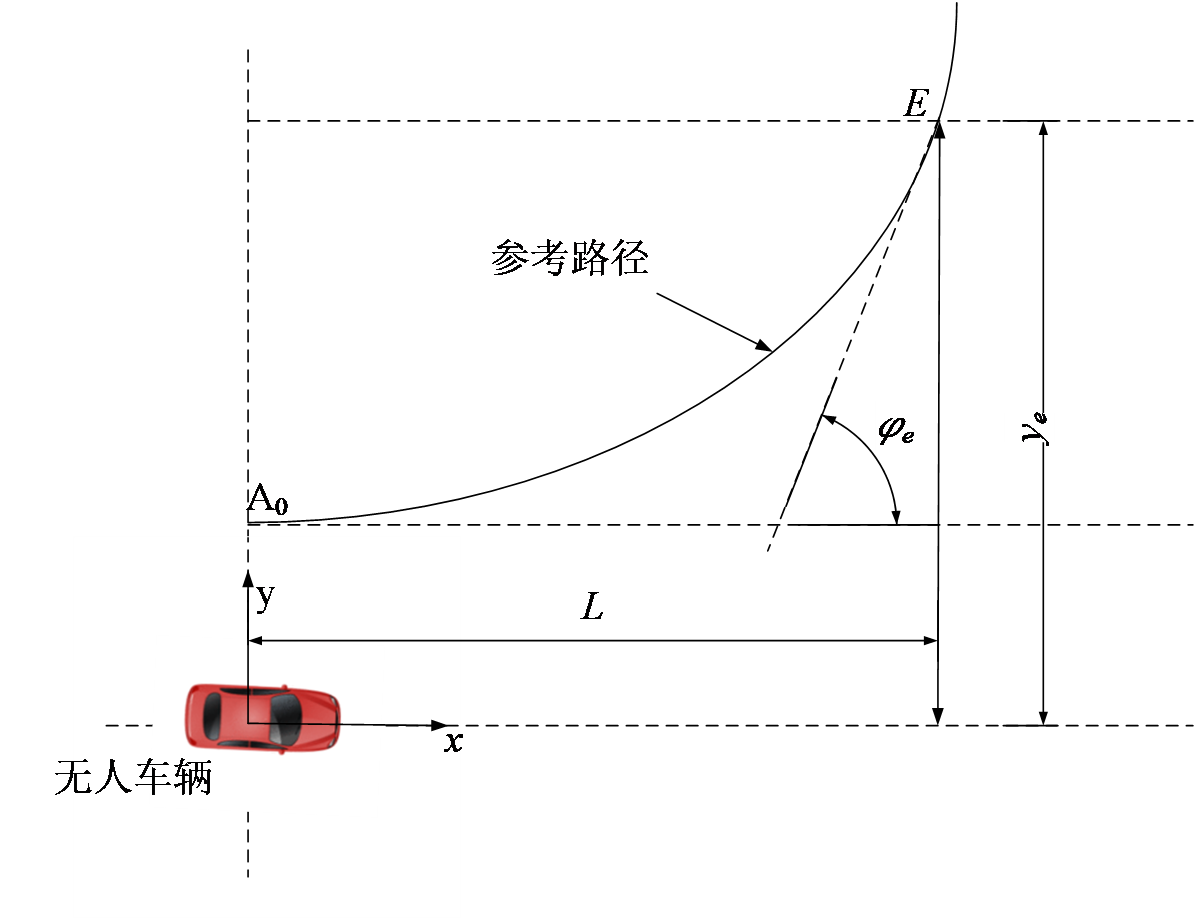
本文首先针对无人车辆的横向运动控制问题,设计了基于航向预估算法的路径跟踪控制器,将当前采样周期内的航向预估量反馈到控制器的下一个采样周期,通过仿真验证了该算法能够有效提高控制器对无人车辆参数变化的自适应性能;同时设计了基于MPC模型预测控制的轨迹跟踪控制器,采用带有控制量增量的目标函数形式,并利用二次规划方法对其进行求解,通过仿真验证了该算法对于给定轨迹跟踪的有效性。
接着,针对无人车辆的纵向运动控制问题,设计了基于经典PID理论的分层式速度跟踪控制器,引入加速度反馈环节,较好地消除了下层控制器的控制精度需依靠无人车辆精确动力学模型的弊端,通过仿真验证了该算法有效地实现了加速度和速度的跟踪控制。
最后,充分发挥自动代码生成技术的优势,将航向预估控制器和PID分层式速度跟踪控制器进行了代码生成、优化、测试等工作。初步完成了无人车辆运控控制器的嵌入式开发。
将自动代码生成技术与无人车辆的运动控制的研究相结合,具有很好的理论研究性和工程实践意义。
关键词:无人车;运动控制;自动代码生成
Abstract
As the level of technology improves, the functions of automobiles are becoming more and more diverse, and the amount of code for automotive electronic control software has also increased dramatically. Automatic code generation technology has become a mainstream market once it has obvious advantages such as short product development cycles and low maintenance costs. Motion control, as one of the current important areas of unmanned vehicles’ research, many control theories formed have effectively promoted the development of unmanned vehicles and provided an imaginative basis and technical support for the construction of intelligent transportation systems.
This paper firstly designed a path tracking controller based on the course estimation method for the lateral motion control of unmanned vehicles, which feeds back the course estimation in the current sampling period to the next sampling period of the controller. The algorithm can effectively improve the controller's robustness to unmanned vehicle parameter changes. At the same time, a trajectory tracking controller based on model predictive control is designed. It adopts the form of an objective function with an increment of the control variable and solves it using the quadratic programming method. The simulation verifies the algorithm for a given trajectory tracking effectiveness.
Then, for the problem of longitudinal motion control of unmanned vehicles, a layered velocity catching controller based on the classic PID algorithm is designed. The acceleration feedback link is introduced to improve the control accuracy of the lower layer controller which relies on the precise power of the unmanned vehicle. The simulation demonstrates that the algorithm can productively accomplish acceleration and speed tracking control.
Finally, giving full play to the advantages of code reproduction techniques, code optimization, testing, and other tasks of the course estimation controller and PID layered speed tracking controller was finished. The embedded development of the unmanned vehicle motion controller was initially completed.
Combining automatic code generation technology with unmanned vehicles’ motion control is not only theoretically researchful, but also has certain practical engineering significance.
Key Words:Unmanned vehicles;Motion control;Code generation;
目录
第1章 绪论 1
1.1 研究背景及研究意义 1
1.1.1 研究背景 1
1.1.2 研究目的及意义 1
1.2 国内外研究现状 2
1.2.1 自动代码生成技术的研究现状 2
1.2.2 无人车辆运动控制的研究现状 2
1.3 研究内容及方法 4
第2章 横向运动控制 5
2.1 算法原理 5
2.1.1 航向预估控制算法原理 5
2.1.2 MPC算法原理 6
2.2 理论建模 7
2.2.1 航向预估控制算法理论建模 8
2.2.2 MPC算法理论建模 11
2.3 控制器的设计 12
2.3.1 航向预估算法控制器设计 12
2.3.2 MPC算法控制器设计 14
2.4 仿真分析 16
2.4.1 航向预估控制算法仿真分析 16
2.4.2 MPC算法仿真分析 23
2.5 本章小结 28
第3章 纵向运动控制 30
3.1 分层式纵向速度跟踪控制原理 30
3.2 上层控制器控制算法及设计 30
3.2.1 上层PID控制算法原理 30
3.2.2 上层PID控制器设计 31
3.3 下层控制器控制算法及设计 31
3.3.1 期望加速度反馈环节设计 32
3.3.2 驱动、制动模式切换的原理及设计 32
3.3.3 驱动控制模式的原理及设计 34
3.3.4 制动控制模式的原理及设计 37
3.4 仿真分析 39
3.4.1 CarSim与Simulink联合仿真 39
3.4.2 仿真结果分析 40
3.5 本章小结 43
第4章 控制器的自动代码生成 44
4.1 自动代码生成原理 44
4.2 应用层代码生成 44
4.2.1 代码生成流程概述 44
4.2.2 控制器模型搭建 45
4.2.3 自动代码生成 49
4.2.4 代码优化 54
4.2.5 代码测试与验证 64
4.2.6 代码集成 66
4.3 单片机底层模块配置 67
4.3.1 单片机接口定义 67
4.3.2 单片机控制程序设计 70
第5章 结论 73
5.1 工作总结 73
5.2 研究展望 73
参考文献 75
附录 77
MPC模型预测控制程序 77
致谢 84
第1章 绪论
1.1 研究背景及研究意义
1.1.1 研究背景
汽车,作为一种解放了人们双腿的交通工具,方便了人们的出行。然而,在当今时代,汽车早已不仅仅只作为单一的代步工具而存在,人们对汽车的性能和功能提出了越来越多的要求。为了满足这些要求,单靠机械结构的改进是很难达到目的的,因此,汽车电控软件的设计变得愈加复杂[1],软件代码量急剧增加。传统的汽车电控系统开发采用手动编写代码的方式,不仅开发效率低,出错率高[2],而且大量的程序员都在进行着重复的脑力劳动,以致欧美汽车巨头通常将这种重复性的写代码的活外包给印度公司以降低成本。然而,自动代码生成技术的出现,极大地改变了传统汽车电控系统的开发流程,以其产品开发周期短、维护成本低等显著优势,较好地满足了汽车行业对于汽车电控系统具有优良的性能和高的开发效率等要求[3],成为汽车电子行业的研究热点和应用主流。
无人驾驶车辆作为当前汽车行业的两大发展主流方向之一,发展势头迅猛。传统的汽车厂商正逐渐和互联网公司合作,智能车辆早已不再是在单个领域缓慢发展,而是在多个领域呈现出一番欣欣向荣的发展景观。无人驾驶车辆也叫做智能车辆,是一种智能移动机器人,其早已超出纯机械的范畴,而是信息交互、智能识别、精确导航等多种新兴技术的有机结合体。无人车辆的研究主要涉及到感知、规划和控制等三个方面,其中,研究其运动控制主要涉及到横向、纵向两个方面。经过了多年的发展,已形成了诸如经典控制、智能控制等多种控制理论。对无人车辆横、纵向运动控制的研究一直是科研院所和相关企业的研究热点。
1.1.2 研究目的及意义
本文的研究目的是通过查阅相关文献,分析、归纳出无人车辆横、纵向运动控制的基本方法,设计横、纵向运动控制器。运用基于模型的设计理念,结合MATLAB/Simulink中自动代码生成工具,进行控制器代码的自动生成,初步完成无人车辆运动控制器的嵌入式开发。
自动代码生成技术作为在汽车电子、航空航天等领域应用较为成熟的技术之一,熟悉其相关原理和一般的操作流程,充分发挥其高效率、低出错率等优势,对于进行无人车辆运动控制器的嵌入式开发具有一定的工程实践意义。
1.2 国内外研究现状
1.2.1 自动代码生成技术的研究现状
请支付后下载全文,论文总字数:42646字
相关图片展示: