在复杂环境下的铰接式车辆精确轨迹优化外文翻译资料
2022-09-11 22:20:48

英语原文共 4 页,剩余内容已隐藏,支付完成后下载完整资料
在复杂环境下的铰接式车辆精确轨迹优化
李白,邵枝江
控制科学与工程学院,浙江大学,杭州,310027,中国
工业控制技术国家重点实验室,杭州,中国
文章信息:
文章历史:
接收于2015年6月4日;
校订于2015年10月18日;
网络上传于2015年11月22日;
关键词:铰接式车辆;行驶轨迹规划;网格生成;避免碰撞;大规模优化;计算制导及控制。
摘要
车辆轨迹规划是指在考虑了一些特殊限制条件的情况下,规划一个考虑行驶的初始和最终条件并且随时间变化而变化的路径。它是铰接式车辆自动驾驶的一个重要研究内容。在本文中,车辆行驶轨迹规划被描述为一个动态的优化问题,其中包含了运动微分方程,机械/环境约束,边界条件和优化目标等几个方面。那些用于解决动态优化问题的常规数学方案通常会忽略相邻两个离散网格的约束满足点,那样就会导致原本的方案在实施的时候失败,于是针对这个不足提出了分网格的概念来弥补这种局限性。这种方法完善了相邻粗糙网格点之间的约束满意度。在精确补偿函数的基础上,大量的约束被纳入优化标准中,从而将动态优化问题转化为一个简单边界上的静态决策变量问题。实验结果表明,这种方法可以提供准确的结果,并且可以处理各种优化目标。
- 引言
铰接式车辆是一种在车体结构中具有旋转接头的车辆[1]。广义上来说,任何拖车都可以被看作是铰接式车辆,相较于相同长度的刚体车辆,铰接式车辆的转弯半径明显更小[2]。此外,铰接式车辆的衔接处可以帮助车辆保持与粗糙地面的接触性,这两个优点使铰接式车辆的应用范围十分广泛,其中包括公共汽车、电车、火车、卡车和地板清洁机器人等[3]。目前的研究主要集中在铰接式车辆的轨迹规划问题上。
轨迹规划包括规划连接初始条件和预期最终条件的时间路径,并且考虑一些预定的要求[4.5]。维亚勒等人[6]提出了一种先计算几何路径,然后生成光滑轨迹的轨迹规划方法,这种方法可实现多段行驶轨迹规划。尽管这种方法能自动并且快速地计算初步几何路径(包括线段和圆弧),但却不能直接、精确地处理一些复杂情况,尤其是有时间依赖性的约束和在遇到放置不规则的障碍物时。除此以外,其他几何方法或路径优先法都不能满足要求[7-11]。王和卡特梅尔采用了一种利用函数拟合的方法来直接计算随时间变化的曲线问题,但是他们的研究中并没有考虑到防止碰撞的问题。扎雷等人[13]开发了一种模糊算法,其中三个独立的模糊控制器分别用于前向机动、接近目的地和防止碰撞。然而,在他们的研究中并没有详细地提及运动模型和运动环境。更重要的是,模糊算法通常是用来确定方案的可行性而不是用来确定优化或者最优运动轨迹。除了上述的轨迹规划方法,以往的研究还包含了一些有轨迹跟踪的轨迹生成器。比如,首先做好路径规划然后直接完成轨迹跟踪。轨迹跟踪包括闭环控制,这样就将自动控制理论运用起来了。对于后退运动,因为它具有很多不稳定的控制因素,所以需要一些特别的处理[14,17]。牵引车和拖车相对称转角(车厢折叠)问题是一个和后退运动同样重要的问题[18]。从理论上讲,由于整个铰接系统是物理连接,沿连接方向的速度分向量应该是一致的,图1(a)是一个具有这种一致性的例子,反之图1(b)显示了由于不一致而导致牵引车和拖车车厢折叠的例子。当牵引车和拖车发生车厢折叠时,将会导致链接被损坏或者拖车侧滑。便提出了小角度约束的提出便是为了避免这种折叠问题,这就要求在每相邻部件间的方向角的误差要很小[2,9-12]。
图1.折叠现象原理图:(a)正常例子;(b)向后移动的折叠;(c)向前运动的折叠
然而,有时小角度满足条件时折叠现象还是会发生,如图1(b)的描述。戴维和曼尼瓦纳总结了导致折叠现象的三个诱导因素:急转弯、后退运动和行驶速度过快。然而这个结论是基于在前进运动中可能发生折叠现象的经验得出的(见图1(c))。
综上所述,上述研究中普遍具有四个缺点:(1)时间约束没有直接在路径优先方法中得到处理;(2)不能在具有不规则放置障碍物的环境中准确规划行驶路线;(3)提出的解决方案只具有理论可行性而不是一个优化或最优方案;(4)部分能在开环轨迹规划阶段处理的问题(例如逆不稳定或避免折叠)被留到了闭环控制阶段。
在现阶段的研究中,原有的轨迹规划方案被看作精确描述物体运动和运动约束的动态优化方案。这些理论并不单凭过往的经验而得出,而是通过客观规律、定则的分析而得出的(例如模糊式逻辑)[22]。在解决这个提出的动态优化问题上,我们提出了一个精确的离散化模型和全局优化的数值求解器,由此得到的解决方案是严格可行的。
本文其余部分的内容如下:第二节涉及一个动态优化问题的提出,第三节涉及一个动态优化求解器问题,第四节涉及仿真结果和分析,第五节得出结论。
- 问题的描述
这一部分重点阐述如何将原始行驶轨迹的规划描述为一个动态优化问题,其中包含了运动学原理、机械约束、避免碰撞约束和优化目标等方面。
2.1 牵引式挂车的运动学分析
本次研究将铰接轮式车辆看作前轮转向式的拖拉机牵引拖车[23]。基于无侧向滑移的基本假设和牵引车有关的运动学分析,可列出以下公式:
(1)
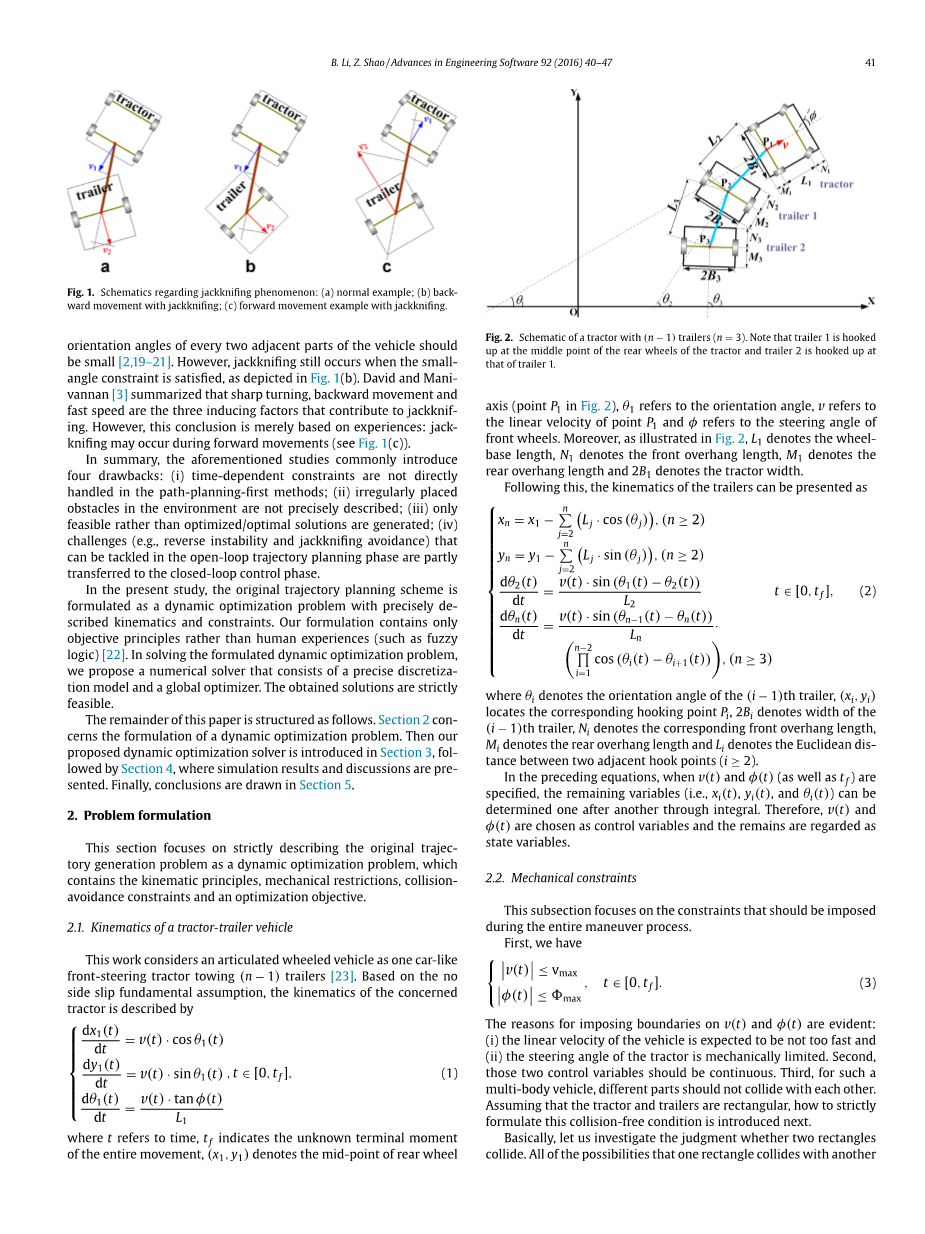
t代表时间,tf代表整个运动过程中未知的终点时刻,(x1,y1)代表后轮的中点(图2中的点P1),theta;1代表方向角,v代表点P1的线速度,Phi;代表前轮的转向角度。此外,如图2所示,L1表示轴距长度,N1代表前悬长度,M1代表后悬长度,2B1代表牵引车宽度。
图2.图示为一个牵引车牵引(n-1)个拖车(n=3),拖车1被挂在牵引车后轮轴的中点上,拖车2被挂在拖车1的后轮轴中点上。
综上所述,我们可以对拖车的运动学分析列出以下公式:
(2)
上式中theta;i代表第(i-1)个拖车的方向角,相应的挂钩位置定位于(xi,yi),2Bi代表第(i-1)个拖车的宽度,Ni代表前悬的长度,Mi代表后悬长度,Li代表两个相邻挂钩点的欧几里得距离。
在上述的方程当中,当v(t)和Phi;(t)(以及tf)已被确定,剩余变量(即xi,yi和theta;i(t))可以分别通过积分来求得。因此,v(t)和Phi;(t)被看作控制变量,其余的变量被看作状态变量。
2.2 机械约束
在本节当中我们重点介绍在整个机械运动中应加强的限制。
首先,我们可得出:
, (3)
给v(t)和Phi;(t)添加边界的原因如下:(1)预期的车辆线性速度不会太快;(2)铰接车辆的行驶转向角大小是有机械性约束的。两个控制变量应该是连续的,对于这样的多体车辆,不同部位不能够相互碰撞。假设牵引车和拖车都是矩形的,怎样严格制定两车体不会相互碰撞将会在接下来的部分进行介绍。
首先是如何判断两个矩形车体是否发生碰撞。两个举行碰撞发生的所有可能性可以分为两个分支:(1)至少有一个矩形的拐角点位于另一个拐角点上;(2)这种拐角点没有位于另一个矩形体区域之内[22]。第二种可能性属于第一种可能性,如果长方形的四个角没有任何一个碰到另一个长方形,那么两个矩形就不会发生碰撞。例如,牵引车不与拖车1发生碰撞应同时满足以下几点:(1)牵引车的四个角都应该在拖车1之外;(2)拖车1的四个角都应该在牵引车之外。当有一个牵引车牵引n-1个拖车,那么它们每两相邻的矩形体都不应该相互碰撞。在这里,有一个问题需要提出:如何判断一个特定的点是否处于给定的区域之内?下面的判断指明了某个特定的点Q位于矩形区域ABCD之内当且仅当[24]:
(4)
通过以上这一点可以得出,避免碰撞约束不管矩形车体是在有规律的放置还是无规律放置障碍的环境中都可以有效解决问题,这一判断的理论证明在附录A中。从几何意义上看,拖车的拐角点A1B1C1D1都位于:
(5)
第i-1个拖车的拐角点A1B1C1D1位于:
(n2)
(6)
2.3 环境约束
这一节内容包含外部约束。首先应该满足初始和最终时刻的条件。初始条件是完全已知的,最终条件会根据情况的不同而改变。在这项任务中,我们要求:(1)车辆最后需要完全停止,例如,v(tf)=0,(2)整个铰接式车辆需要位于方形区域。由于凸集属性,内箱终端属性相当于将牵引车和拖车所有的拐角点约束不位于外部[25]。其次,牵引车-拖车系统不能够和环境中的障碍物发生碰撞。在这项研究中,只考虑了矩形障碍,如果放置不规则形状障碍将会导致整个工作区域混乱。基于公式(4),这个防碰撞条件和之前章节所述的内容相似。
2.4 优化准则和整体结构
在本次研究中考虑了三种类型的优化标准:(1)最短的运动时间tf;(2)最短的到点P1的距离;(3)最短的拖车的机动时间。本节所述的所有内容构成了一个动态优化问题,这远远超出了现有的求解器所能解决的。
3 动态优化问题的解决方案
一种新的数值方法被提出来解决动态优化问题,这种数值方法包括两个方面:离散化和优化。对于前者,所有的连续时间状态和控制配置文件中的离散成有限周期。通过这一点,原有的无穷维问题被转换成为一个有限维非线性规划问题(NLP),这是在最后一个阶段解决的问题。
3.1 离散化阶段
这一节将动态优化问题描述为有限维非线性规划问题(NLP),未知变量包括控制变量(例如v(t)和Phi;(t)),状态变量(xi(t),yi(t),theta;i(t),Ai(xt),Bi(xt)等)和tf。
首先,时域[0,tf]
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[146010],资料为PDF文档或Word文档,PDF文档可免费转换为Word



