感知运动:人体运动测量微传感器外文翻译资料
2023-05-23 15:59:09
英语原文共 23 页,剩余内容已隐藏,支付完成后下载完整资料
感知运动:人体运动测量微传感器
摘要:身体姿态和运动的识别,是人体保持身体平衡的重要生理功能。人造运动传感器也广泛应用于生物医学应用,包括平衡障碍诊断和能量消耗评估。本文回顾了一些用于身体运动测量的最先进的感测组件。首先描述了运动传感器(人前庭系统)的解剖和工作原理。然后,基于它们独特的感测机制来制作各种人造惯性传感器。特别地描述了传统的固态运动传感器和新兴的非固态运动传感器。人造运动传感器具有更低的成本和更高的智能,预计将在基础研究和临床诊断的生物医学系统中将发挥越来越重要的作用。
1.概述
运动感知是一个重要的感知方式,在临床医疗中起着重要的作用。举实例来说,头部的角度和身体方向是人体平衡的输入信号。使用呼吸机时,需要精确监测胸壁的运动以支持人体的呼吸,残疾人康复过程也需要评估身体运动特征。目前的运动感知的临床解决方案是使用基于摄像头的运动捕捉系统,其中身体运动是从附加在身体上的多个特征点的运动导出的。虽然有效,但这种技术是尖端和昂贵的。也难以融入现代医疗体系,如便携式医疗器械和点护理(POC)药物。近来,微型运动感应技术取得了显着进步,推动了人体平衡假体、运动医学、放射治疗和生物力学研究的发展。而且具有高精度,高可靠性和多功能的微机电系统(MEMS)的快速发展为身体运动感应提供了较强有力的工具。在过去二十年中,微运动传感器的研究受到广泛的关注,而且该领域仍持续活跃。
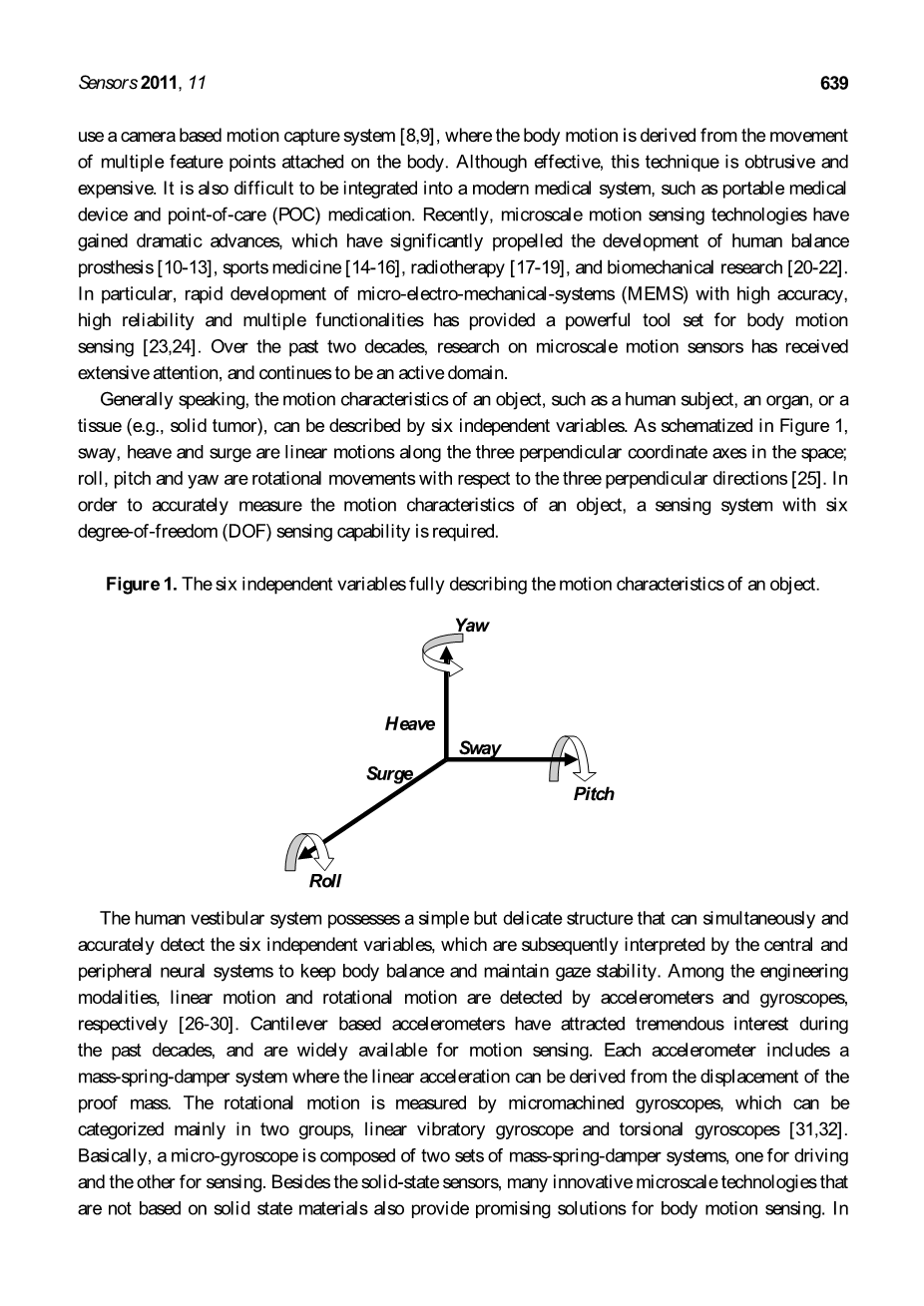
一般来说,人类的器官或组织(例如肿瘤)等物体的运动特征可以由六个独立变量描述。如图1所示,摆动,起伏和浪涌是沿着空间中的三个垂直坐标轴的线性运动;滚动,俯仰和偏转是相对于三个垂直方向的旋转运动。为了精确地测量物体的运动特性,需要具有六度(DOF)感测能力的感测系统。
人类前庭系统具有简单而精细的结构,可以同时准确地检测六个独立变量,随后由中枢神经系统和周边神经系统进行解释,以保持身体平衡并保持凝视稳定性。在工程模式中,线性运动和旋转运动分别由加速度计和陀螺仪检测。基于悬臂的加速度计,在过去几十年中一直使研究者们充满兴趣,并且已经广泛应用于运动检测。每个加速度计包括质量弹簧阻尼器系统,其中线性加速度可以从计算物质的位移导出。旋转运动由微加工陀螺仪测量,主要分为两组,线性振动陀螺仪和扭转陀螺仪。微陀螺仪基本上由两组质量弹簧阻尼器系统组成,一组用于驱动,另一组用于感测。除了固态传感器,许多不是基于固态材料的创新微型技术也为人体的运动感应提供了解决方案。特别是基于液体状态检测质量的微传感器,由于其感测原理更接近于自然运动传感器的原理而获得了研究者的特别关注。这些传感器满足对人体运动测量来说非常重要的低频要求。
在本文中,将介绍一些可用于人体运动检测的、最先进的微型运动感测技术。首先引入自然运动感应系统,即人类前庭器官。阐述其解剖和生理功能。之后是对传统固态传感器的全面综述。描述了微机械加速度计和陀螺仪的代表性配置,设计原理,关键的制造方法和感测机制。之后引入了几种基于非固体材料的创新运动感测技术,包括生物启发的毛细胞加速度计,基于液滴的运动传感器和基于热对流的加速度计。最后,详细阐述了用于人体运动测量的人造传感器的代表性应用,还讨论了近期这一领域的发展。
2.人类前庭系统
生物中的姿态识别和运动感知,是通过协调一些不同的器官来实现的。例如,人类可以使用眼睛,耳朵,前庭系统,关节,皮肤以及许多其他内脏器官来识别其运动状态。主体可以使用由中央和周边神经系统协调的反馈机制实时调整他的姿态。在这些器官中,人前庭系统是位于内耳中的自然建立的运动感测装置。它感测身体加速度和头部旋转角度,随后将其转移到中央和外周神经系统,以实现平衡控制和注视稳定。前庭系统的解剖结构如图2所示。
该系统由两套末端器官组成,即半规管和耳石。半规管负责旋转运动检测,而耳石负责平移运动检测。半规管填充着体液,称为内淋巴,当受试者经历头部旋转时,其相对于运河壁移动。响应于流体运动,管壁上的毛细胞束弯曲并产生动作电位脉冲。生物电脉冲的频率与毛细胞弯曲的强度成比例,并且反映头部旋转的角速率。为了感知三维空间中的运动,每只耳朵的前庭系统包含三个相互垂直的半规管,分别称为水平的、前后的和后半径的运河。这些运河的排列方式使得一只耳朵中的每个运河在另一只耳朵中具有平行的对应物。通过这样的结构,当刺激一只耳朵中的运河时,另一只耳朵中的对应物体被抑制。这种推拉方式使人类能够区分旋转运动的方向。半规管系统是前庭眼反射(VOR)不可或缺的部分,它可以在头部运动期间稳定视网膜上的图像。VOR接收头部旋转信息,并在相反方向产生眼睛运动,以保持视野中心的图像。图3说明了感觉输入和电机输出之间的关系,显示了VOR在调整眼动中的作用。如果VOR系统受损,即使在小的头部震颤下也会出现视力模糊,导致眩晕和眩晕。此外,无法实现姿势调整的适当电机脉冲,这导致伴随身体不稳定的症状。
半规管测量角速率,耳石测量线性加速度。每只耳朵的耳石包含两个小的器官,称为小囊和囊。由于它们在头部的物理取向,所以小角度在水平方向上的运动是敏感的,并且囊状物感测到在垂直方向上的移动。类似于半规管,耳石也由内淋巴和毛细胞组成。在外部运动时,内淋巴的惯性运动通过弯曲毛细胞来刺激毛细胞。由毛细胞产生的生物电信号被转移到脑部,并被解析。随着眼睛和关节的输入,大脑获得人体的平衡状态,并向运动系统发送命令进行姿势控制。有趣的是,尽管从动力学角度看,重力相当于沿着垂直方向的线性加速度,但前庭系统可以通过人类不能完全理解的机制来很好地区分重力与线性加速度。
由于前庭系统是人体平衡系统中不可或缺的一部分,若有障碍就会导致一系列症状,包括视力模糊,眩晕,慢性头晕,跌倒风险增加。根据临床调查,美国有620万成年人有长期的平衡问题,每年花费超过10亿美元用于这类疾病的医疗保健。前庭疾病可能由于各种原因,如损伤,感染,神经疾病,手术,药物中毒等,使药物治疗单独无效治疗。很显然,前庭假体是帮助患者平衡问题是必要的。如今,已经开发了许多具有与前庭系统相似功能的人造运动传感器。以下部分中,将回顾具有运动障碍或前庭假体的人造运动传感器的最新技术。
3.固态运动传感器
3.1.基于悬臂的加速度计
使用基于悬臂的加速度计来测量人体运动,是在20世纪50年代首次提出的。然而早期的加速度计有些不可靠,体积大而且昂贵。随着微型加工技术的革命性进步,最先进的微加速度计已经变得更加准确,可靠,更小,性价比更高。他们在生物医学领域的应用得到了广泛的探索,大大改变了这一领域的体动测量。
典型的基于悬臂的加速度计结构可以由质量弹簧阻尼器系统表示,如图4所示。关键部件是由锚固到支撑框架的柔性梁(悬臂)悬挂的检测质量块。惯性力产生检测质量块和支撑框架之间的相对运动,并在悬臂内引起机械应力。相对运动和机械应力都可以表示外部加速度。
等式(1)是描述作为应用的外部加速度的函数的校验质量的运动的二阶数学模型:
其中m为检验质量,x为检验质量的位移,t为时间变量,b为阻尼系数,k为悬臂的弹簧常数,a为待确定的外加速度,omega;为角频率的外加速度。在基于悬臂的微加速度计中,检测质量的位移通常在几微米以下。这种小的位移需要被转换成可测量的物理信号以确定外部加速度。已经使用许多感测机构来确定悬臂位移,从而通过电容式压阻,压电或隧道电流测量来确定加速度。
3.1.1.电容加速度计
电容加速度计是市场上使用最广泛的固态运动传感器之一。当可动电极板与固定支撑框架在平面内或平面内移动时,电阻值的变化导致检测质量块和支撑框架之间的相对位移(图5)。实际上,可移动电极和固定框架通常是以交叉指状电极指(例如梳状驱动结构)的形式。可动指状物以及固定指状物的重叠区域和手指之间的间隙距离,是确定测量灵敏度的重要参数。
3.1.2.压阻和压电加速度计
微加工压阻加速度计首先由Roylance和Angell描述,目前用于各种工业应用。压电加速度计中的悬臂结构的结构类似于电容式加速度计中的悬臂结构,而其电气测量机构是不同的。在压阻加速度计中,压敏电阻通常在连接检测质量块和支撑框架的窄悬臂上进行图像化。由于悬臂的机械灵活性,当外部加速度取代检测质量时,会发生大的机械应变。该应变来自压敏电阻器的电阻变化。
压电加速度计可以通过表面微机械加工和体积微加工制造。通过使用压敏电阻作为感测部件,由于相对简单的配置和制造,这种类型的加速度计是有利的。尽管如此,压阻加速度计非常容易受到温度变化的影响。改进的设计包括使用大型检测质量,与温度补偿电路集成,以及使用CMOS电子器件的单片实现。
压电加速度计具有与压阻对应物相似的配置,但是测量由悬臂的机械位移引起的电压的加速度。一个显着的区别是压电加速度计只响应于动态信号,而压阻传感器可以测量低频和零频率下的位移。
3.1.3.隧道加速度计
隧道效应描述了当导电锋利尖端和对电极位于大约10埃的小间隙距离处并设置在DC电压偏置时发生的现象,在尖端和电极之前建立隧道电流,两个部分相互接触。隧道电流随间隙距离呈指数变化。这种指数关系提供了一种用于位移检测的超灵敏方法,并已被用于实现具有高分辨率的微加工隧道加速度计。在典型的配置中,证明物质附着到导电末端并且以相对电极的小间隙定位。在测量期间,隧穿电压保持不变。在外部加速时,检测质量被接近或远离对电极。隧道电流的变化反映了悬臂的位移,是外加速度的量度。据报道,对于每个位移,隧道电流变化一倍,提供超高灵敏度。此外,由于隧道尖端仅在尖端周围的局部区域(1m2)内有效,所以该装置可以进一步小型化而不影响电气测量。通常通过(100)单晶硅的KOH蚀刻,然后金属沉积来制造隧道尖端。阳极结合通常用于组装尖端和对电极。
3.2.陀螺仪
陀螺仪是指测量物体旋转速度的传感器。微机械陀螺仪利用科里奥利效应,将被摄体的旋转运动转换为可测量的直线运动。因此,可以使用上述测量线性加速度的感测机构来确定旋转速率。
众所周知,科里奥利效应是指在旋转坐标系内垂直于被摄体移动方向的假想力(科里奥利力)的产生。这在图6(a)中说明,并简要说明如下。假设坐在z轴周围的旋转坐标系的x轴上的观察者观察到在空间中以速度V行进的移动粒子。由于旋转坐标系,粒子具有朝向x轴的轨迹,从观察者的角度看,加速度为2Vtimes;omega;。在旋转坐标系中观察到的表观加速度称为科里奥利加速度,与坐标系的旋转速率(omega;)和物体(V)的行进速度成比例。根据这种现象,可以设计出没有任何旋转部件的微加工陀螺仪,它由两组沿垂直方向定位的质量弹簧阻尼器系统组成(图6(b))。一组处于驾驶模式,另一组处于感测模式。每个质量弹簧阻尼器组件基本上都是线性加速度计。在操作期间,驱动装置中的检验质量以一定的频率被致动。在框架的旋转移动时,在正交方向上产生的科里奥利加速度提供了感测组的输入,该感测组由感测模式加速度计测量。
其中x和y分别是x和y方向上的质量块的位移,cx和cy是两个方向上的阻尼系数,kx和ky是两个方向上的弹簧常数,tau;x和tau;y是外力驱动和感测模式,Omega;z是要确定的坐标系的角速率。应该指出,上述的配置仅展示了一种典型形式的线性振动微加工陀螺仪。还有许多其他配置,包括但不限于线性振动陀螺仪和扭转陀螺仪。
3.3.包装与整合
固体微加工惯性传感器的包装和集成是必不可少的。包装不仅提供机械外壳,以避免阻尼,管理热转印,隔离机械冲击,保护传感器免受恶劣的化学环境的影响,同时将传感器与外部环境电连接并将其与外部电磁干扰隔离开来。封装还减少了通过相同工艺设计和制造的器件之间的阻尼条件的变化。在设计阶段应考虑包装技术,因为不同的包装方法可能需要不同的制造工艺和配置。在实践中,常规使用阳极接合,共晶接合,热熔融粘合或玻璃料接合技术。
固态惯性传感器中的机械传感元件需要与控制和测量电路集成。通常使用两种类型的集成方法,即混合集成和单片集成。混合集成采用引线键合将传感部件与其控制IC电连接,其中电互连暴露在封装外部。另一方面,单片整合在一个步骤中同时制造传感器及其控制IC。因此,它可以最大程度地减少接触问题和寄生效应,这对许多CMOS兼容的制造工艺是有利的。包装和整合的详细讨论超出了本次审查的范围,可以在文献中找到。
4.非固态运动传感器
从固体运动传感器的上述描述中,不难确定使用人造固态传感器的运动检测与依赖于非固态材料的自然运动感测系统的运动检测有些不同。一个显着的区别是测量频率的范围。使用固态检测质量的小型化运动传感器的共振频率通常在几kHz或更高的数量级,而体动的典型频率通常低于10Hz。为了降低谐振频率,通常需要细长的悬臂(即,长度与宽度比较大)。然而,这增加了制造和封装的复杂性,并且降低了传感器的机械坚固性。受到自然运动传感器的启发,非固态运动传感器最近被提出作为另一种人造运动感应机构,它利用各种不同的检测原理进行身体运动检测。具体地,描述了使用流体或气体材料作为证明物质的传感器。在频率响应,制造,封装和集成方法方面,将其独特的特性与固态传感器进行了比较。由于大多数这些非固态运动传感器在过去两年中正在出现,所以还没有广泛的报道将这些传感器应用于身体运动测量。因此,本节主要侧重于工作原理和传感器开发。
4.1.基于毛细胞的运动传感器
如上所述,人前庭系统基于毛细胞束的弯曲来测量身体运动。灵感来自于人造毛细胞传感器,使用聚合物和金属材料。这种传感器在运动测量中的应用也得到证实。图7(a)示出了人造毛细胞的示意图,其中将具有压阻应变计的悬臂悬挂在大气中,并且SU-8柱附接在悬臂的远端。朝向SU-8柱的轴向力在悬臂底部引起机械应变,并通过压电电阻测量。人造毛细胞传感器集成在流体系统内以模拟天然前庭系统[图7(b)]。通过将人造毛细胞传感器放置在充满水的通道中,该装置具有与前庭系统中的半规管相似的几何形状。当施加外部加速度时,通道内的流体与传感器相对运动并且根据加速度幅度在一定程度上弯曲毛细胞。与基于悬臂的加速度计不同,系统使
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[612908],资料为PDF文档或Word文档,PDF文档可免费转换为Word



