车路协同环境下的交叉口信号控制优化设计毕业论文
2020-02-19 16:39:50
摘 要
车路协同技术作为智能交通系统的前沿技术,能够将人、车、路三者有效的联系起来并为交通控制提供实时而全面的车路信息,为解决交通问题提供了新的方案。针对传统交叉口交通信号控制方式的不足,本文提出了车路协同环境下的交叉口信号控制的基本思路和流程;根据交叉口车辆运行状态,针对不同时段的交叉口建立不同的信号控制模型:在平峰时段以交叉口停车延误最小为目标,建立交叉口的信号控制优化模型;在高峰时段以交叉口通过率最大为目标,建立交叉口的信号控制优化模型。为了验证模型的有效性,通过VISSIM结合MATLAB进行二次开发来对车路协同环境下的交叉口信号控制优化模型进行仿真验证。结果表明,与定时信号控制交叉口相比,本文提出信号控制方式使高峰时段的交叉口平均延误降低45.5%,停车次数降低14.4%,平均排队长度降低43.3%;平峰时段的交叉口平均延误降低37.4%,停车延误降低46.2%,停车次数降低17.4%,平均排队长度降低40.1%。证明本论文提出的车路协同环境下的交叉口信号控制优化模型能有效提高交叉口通行效率。
关键词:车路协同;交叉口;信号控制;车速引导;交通仿真
Abstract
As the cutting-edge technology of intelligent transportation system, Cooperative Vehicle Infrastructure System can effectively connect people, vehicles and roads and provide real-time and comprehensive vehicle-road information for traffic control, providing a new solution to traffic problems. In view of the deficiency of the traditional intersection signal control method, this paper puts forward the basic idea and process of the intersection signal control under the vehicle-road cooperative environment. According to the running state of vehicles at intersections, different signal control models are established for intersections at different time periods. The signal control optimization model of the intersection is established with the maximum pass rate of the intersection as the target. In order to verify the effectiveness of the model, the signal control optimization model of intersection under the vehicle-road collaborative environment was simulated and verified through the secondary development of VISSIM and MATLAB. The results show that, compared with the timed signal control intersection, the proposed signal control method can reduce the average delay, parking frequency and average queue length by 45.5%, 14.4% and 43.3% respectively. The average delay, parking delay, parking frequency and average queue length at the intersection in the peak period were reduced by 37.4%, 46.2%, 17.4% and 40.1% respectively. It is proved that the proposed model can effectively improve the intersection efficiency.
Key Words:CVIS; Intersection; Signal control; Speed guidance; Traffic simulation
目 录
摘要 I
Abstract II
第1章 绪论 1
1.1研究背景及意义 1
1.1.1研究背景 1
1.1.2研究意义 1
1.2国内外研究综述 3
1.2.1车路协同发展现状 3
1.2.2对信号控制的优化 3
1.2.3车速引导策略 4
1.2.4小结 4
1.3 研究内容与方法 4
1.4 技术路线 5
第2章 车路协同环境下的信号交叉口系统分析 6
2.1 车路协同系统构成 6
2.1.1智能车载系统 7
2.1.2智能路侧系统 7
2.1.3车路/车车协同信息交互系统 8
2.2 车路协同环境下信息交互方式 9
2.2.1 周期发送形式 9
2.2.2 请求响应形式 9
2.2.3 事件驱动形式 9
2.2.4 信息交互形式选择 9
2.3 信号交叉口控制方法对比分析 10
2.3.1 定时控制交叉口 10
2.3.2 感应控制交叉口 10
2.3.3 自适应控制交叉口 11
2.3.4 车路协同环境下的交叉口 11
2.4 本章小结 12
第3章 车路协同环境下的交叉口信号控制优化模型 13
3.1 车路协同环境下交叉口的基本条件 13
3.2 车路协同环境下的交叉口信号控制方法 13
3.2.1 基本假设 13
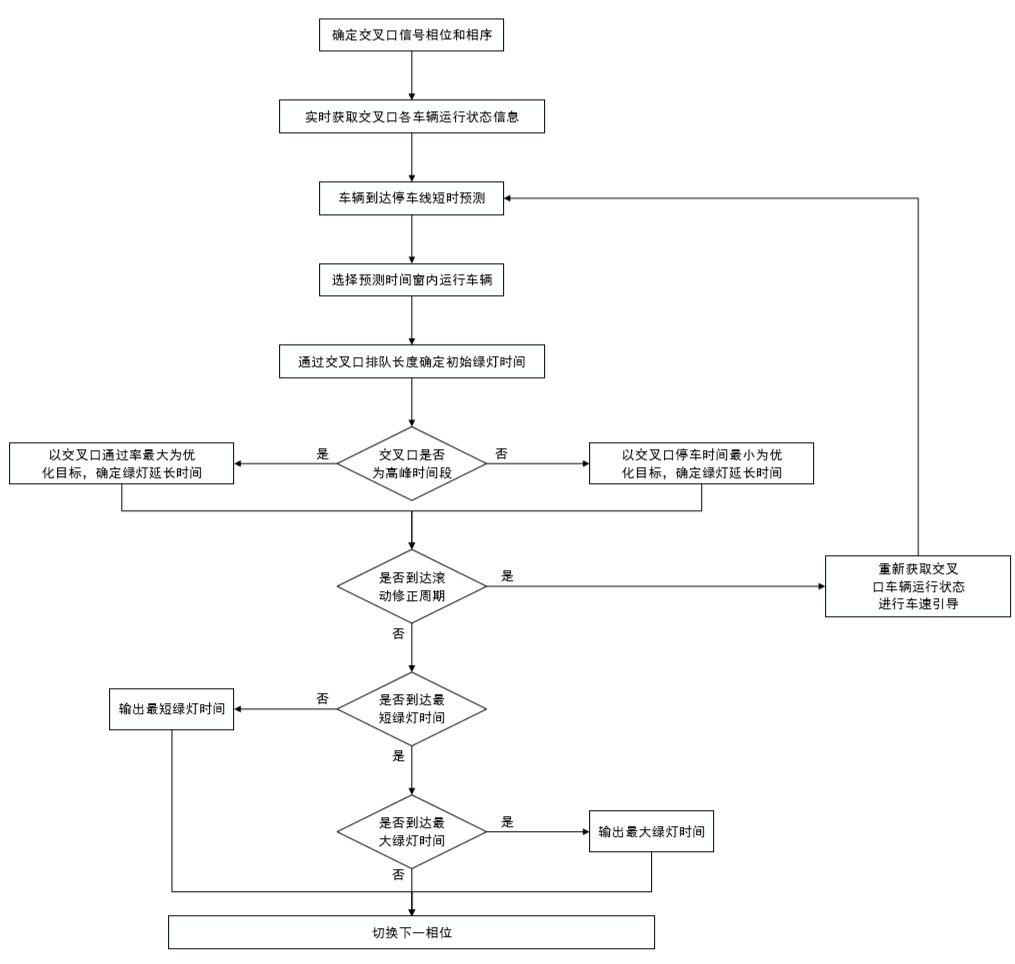
3.2.2 控制流程 13
3.3 控制参数标定 15
3.3.1 最短绿灯时间 15
3.3.2 最大绿灯时间 16
3.3.3 初始绿灯时间 16
3.3.4 绿灯延长时间 16
3.4 优化模型建立及求解 20
3.4.1 基于停车延误最小优化建模 21
3.4.2 基于通过率最大优化建模 21
3.4.3 模型求解 21
3.5 本章小结 21
第4章 车路协同环境下交叉口信号控制模型仿真实验 22
4.1 实验场景 22
4.2 仿真平台搭建 24
4.3 仿真结果 25
4.4 本章小结 26
第5章 总结与展望 27
5.1 主要成果 27
5.2 创新点 27
5.3 研究展望 28
参考文献 29
致谢 31
第1章 绪论
1.1研究背景及意义
1.1.1研究背景
近年来,城市经济快速发展使得机动车保有量不断增长,交通需求快速增加。截至2018年9月,我国机动车保有量达到3.22亿辆[1]。随之产生了一系列的交通问题,如交通污染、交通安全、交通拥堵等。一方面,这些交通问题对城市的可持续发展产生了负面影响;另一方面,它们造成了生命、财产的巨大损失。由于传统交通控制无法高效的协调人车路三者之间的关系,所以往往无法有效处理交通污染、交通安全、交通拥堵等问题。
随着智能信息时代的到来,智能交通系统为解决交通问题提供了新的方案。车路协同技术作为智能交通系统的前沿技术,是未来智能交通发展的主要研究方向之一。车路协同系统通过无线电通信技术和传感器检测技术等采集动态实时的车辆和道路有效信息建立车路通信,将人、车、路三者有效的联系起来,完成车辆和路旁基础设施之间的信息交互,充分利用基础设施和道路的资源,提高通行效率,改善交通的安全,缓解道路交通压力[2]。车路协同技术与交叉口信号控制系统相结合可以有效解决传统交叉口信号控制方式采集数据单一,精度偏低,实时性差等问题,有效减少交叉口延误,提高通行效率,同时也起到改善交叉口环境的作用。
1.1.2研究意义
信号交叉口是制约城市道路网络通行能力的主要瓶颈,一个良好的交叉口信号控制系统可以保障城市道路网络的正常运行。但是受制于计算机和通信技术的发展,传统的信号控制系统往往存在不能适应交通流随机变化,采集数据单一,精度偏低,实时性差等问题,因此交叉口的通行效率还有很大的提升空间。
作为智能交通系统的一个重要子系统,车路协同系统能够克服传统信号控制方法的缺点,为交通控制提供实时而全面的车路信息。在此基础上对信号控制系统进行优化,可以起到增强信号交叉口的通行效率和安全性的作用,从而推动交通路网性能的优化。
目前交叉口信号控制方法可以分为三种: 定时控制、感应控制和自适应控制。定时控制基于历史交通数据,为一天中的不同时间创建信号控制方案。其假设在控制期间,交通需求保持相似。然而在现实中,交通需求可能会快速波动。感应控制是在交叉口停车线上游设置传感器,基于车辆的到达与排队状况确定绿灯时间,在一定程度上弥补了固定信号配时的不足,但其缺乏自我优化能力。自适应信号控制系统主要依赖于传感器的数据,比如地磁或视频环路检测器。但该方法有两个缺点:首先,检测器是只在车辆通过时提供瞬时车辆位置数据和交通量数据,无法直接测量车辆的状态(位置、速度、加速度);其次,检测系统的安装和维护成本较高。如果一个或多个检测器出现故障,则自适应信号控制系统的性能会大大降低。车路协同技术克服了以上的缺点,能够为交通控制提供实时而全面的车路信息,适应交通流的随机变化;由于车路协同装置装载于每辆车辆的个体之中,所以个别故障不会影响整体的控制效果。因此,基于车路协同技术对交叉口信号控制的研究具有重要的现实意义。
车路协同环境下的交叉口信号控制优化设计研究的意义如下:
1.适应交通流的随机变化。
在车路协同环境下,交叉口能够获得附近车辆的运行状态,动态实时的采集车辆位置、速度、加速度等数据。在此基础之上,能为交叉口制定更加适应交叉口交通动态变化的信号控制方案。
2.有效提高交叉口信号控制效率。
车路协同系统可以建立人、车、路三者的有效联系,基于其能够实现车辆和交叉口之间的信息交互的特点,可以对信号控制方案进行调整,达到充分利用交叉口道路设施资源,提高交叉口通过率的目的。
3.增加了信号控制系统稳定性。
车路协同可以实现信息在系统内部的准确、快速和有效的传输,而且能获取车辆位置、速度、加速度等更加全面车辆数据。车路协同系统安装与维护的成本比自适应控制系统要低得多。并且如果一个或多个车路协同的车载装置由于通信失败而无法与交叉口通信,也不会对整体产生较大的影响。从而到达提高系统稳定性的目的。
4.减少车辆的能源消耗与尾气排放
基于车路协同环境对车辆进行速度引导,能避免车辆不必要的加速、减速以及停车的现象,使车辆以一个合理的速度行驶,从而减少车辆延误、停车延误等,随着车辆行驶的稳定性增加,在一定程度上能减少汽车能源消耗以及缓解交叉口的尾气污染问题。
本论文旨在车路协同技术的基础上对交叉口信号控制进行研究,根据实时获取的车辆时空信息探讨信号控制的优化设计,基于车路协同环境建立交叉口信号控制优化模型,并通过MATLAB结合VISSIM二次开发对本文提出的优化设计方法和模型进行仿真实验评价。
1.2国内外研究综述
1.2.1车路协同发展现状
车路协同技术是解决日益严峻的交通问题的有效途径,国内外都对车路协同技术开展了充分的研究。美国对车路协同技术的研究开展于20世纪90年代[3],并在近几年致力于“智能车路系统”、“车路智能集成系统”、“车路智能协作系统”的研究[4]。欧洲对车路协同技术的研究开始于2003年,以eSafety计划为开端保障车辆的安全通行,2006年提出CVIS项目进行车辆与车辆之间的通信研究,建立车辆与车辆之间的稳定通信环境[5]。我国对车路协同技术的研究起步较晚,但随着车路协同技术在解决交通问题方面发挥越来越大的作用,我国也逐渐重视车路协同技术的发展。姚佼等开展了“全息交通状态感知”、“车路协同交通控制系统”等项目[6]。王祺等展开了“智能车路协同关键技术研究”等课题,对车路协同环境下的车辆安全通行进行了研究[7]。
1.2.2对信号控制的优化
国内外相关学者研究了如何有效利用车路协同数据优化信号相位方案。吴伟等[8]基于车路协同环境,提出了一种动态车速的相位差优化方法,该方法以流量与速度乘积最大为目标,在考虑初始队列清空时间,速度变化范围和相位差取值空间等约束条件下,建立了车速与信号相位差的滚动优化模型。林晓辉[9] 在车路协同环境下,提出一种基于交通密度的交通信号控制方法,该方法借助感应控制方法的思路,依据排队消散时间确定进口道绿灯时间,依据进口道交通密度实时选择车流放行方向。Feng等[10]基于车路协同环境,建立了以排队长度和延误为优化目标,相位绿灯时长为约束条件的实时自适应信号相位分配模型。
国内外专家学者对车路协同环境下信号配时方案做出了充分的研究。张存保等[11]在车路协同环境下,借助单点信号控制方法的思路,以整个交叉口延误和停车次数最小为目标,建立了单点信号控制优化模型,但该方法需要计算每种配时方案下交叉口所有车辆的延误和停车次数,计算量较大。周建山等[12]基于车路协同环境,提出了单个交叉口的自适应优化控制策略,通过将神经计算原理与模糊决策技术引入信号优化控制策略中,在交通流模式识别的基础上,建立了交通信号控制优化模型。张存保等[13]基于时间窗的滚动预测方法,将相位饱和度为优化目标,并加入车速引导,提出了车路协同环境下道路交叉口信号控制优化模型。姚志洪等[14]提出了一种车路协同环境下交叉口自适应实时控制优化模型,该模型以交叉口车均延误最小为优化目标,相位绿灯时长为约束条件,采用遗传算法对模型进行求解,从而得到交叉口信号配时实时优化方案。但该模型大多适用于非饱和状态交叉口,且未考虑交叉口相序的优化。王彬等[15] 在车路协同环境下,提出了一种无控制交叉口的车辆协调控制策模型,以最大流量为目标,运用整数规划模型对交叉口信号控制进行优化。Christian 等[16]在车路协同环境下,建立交叉口信号控制的整数规划优化模型。Chen等[17]在车路协同环境下,建立了单个车辆和道路交叉口的状态方程,在此基础上建立了单交叉口信号控制模型。Goodall等[18]提出了一种用于信号控制的预测微观仿真算法,该算法从联网车辆的位置、航向、速度等数据中提取数据,利用微观仿真模型对未来交通状况进行预测,对交叉口信号控制进行优化。该算法考虑了多个市场渗透率,提出了一种基于连通车辆数据估计未装备车辆状态的算法。但是由于算法计算时间过长,不能实时应用。龙文民等[19]通过协调交通信号配时与车速引导,建立了紧急车辆交叉口优先通行控制模型。
1.2.3车速引导策略
国内外专家学者对车路协同环境下的车速引导也作出了研究。Qing He[20]提出了车路协同环境下的紧急车辆车速引导模型,并优化绿灯延长时间使得车辆平均延误最小化。Mohammad Nekoui等[21]在安全领域,通过车路协同系统对车辆进行速度引导,建立了车辆紧急避让防碰撞系统,并实地对系统可靠性进行了验证。李鹏凯等[22]基于车路协同环境,以交叉口延误和停车次数为目标,建立了面向个体车辆的车速引导机制与模型。
1.2.4小结
从上述文献中可以看出,针对车联网环境下的信号控制研究问题上,国内外学者做过许多卓有成效的研究,但仍有一些不足之处:
(1)目前对于车路协同环境下的信号控制研究,大部分都只考虑了信号控制优化或者只进行车速引导。
(2)针对车路协同环境下的信号配时层面,目前只对单一时间段,单一维度进行优化设计,存在一定的优化空间。
(3)对优化目标,现有研究往往是从交叉口延误等方面出发,没有考虑交叉口环境污染的影响。
1.3 研究内容与方法
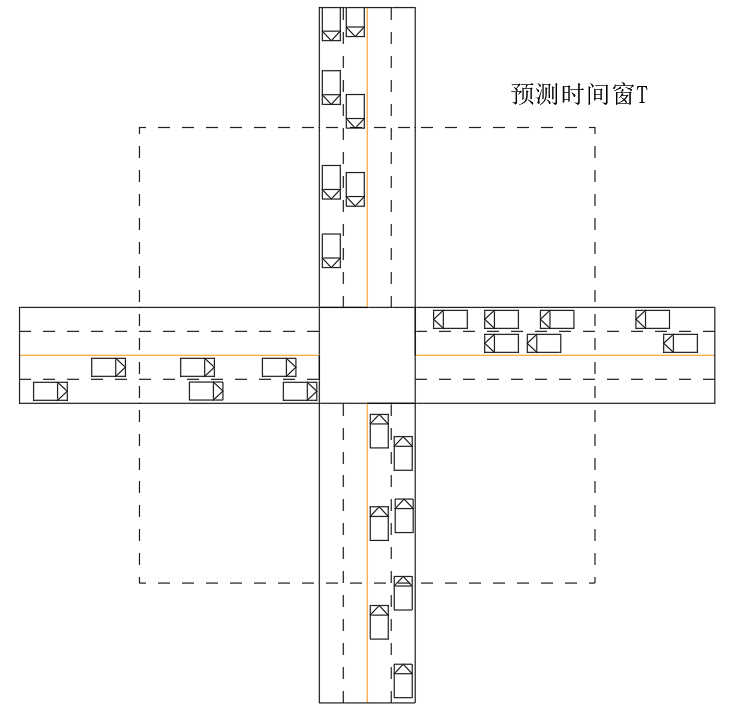
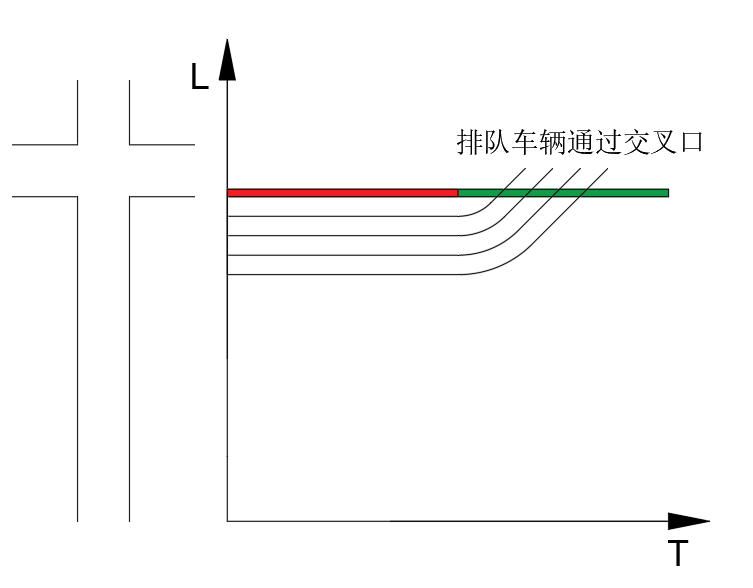
1.车辆到达预测
根据车路协同环境下获得的交叉口范围内各车辆的实时运行状态信息,对各车辆通过交叉口的情况进行短时预测。从预测结果推算出交叉口停车延误,以及交叉口通过率,作
为优化模型的基础数据。
2.建立信号控制优化模型
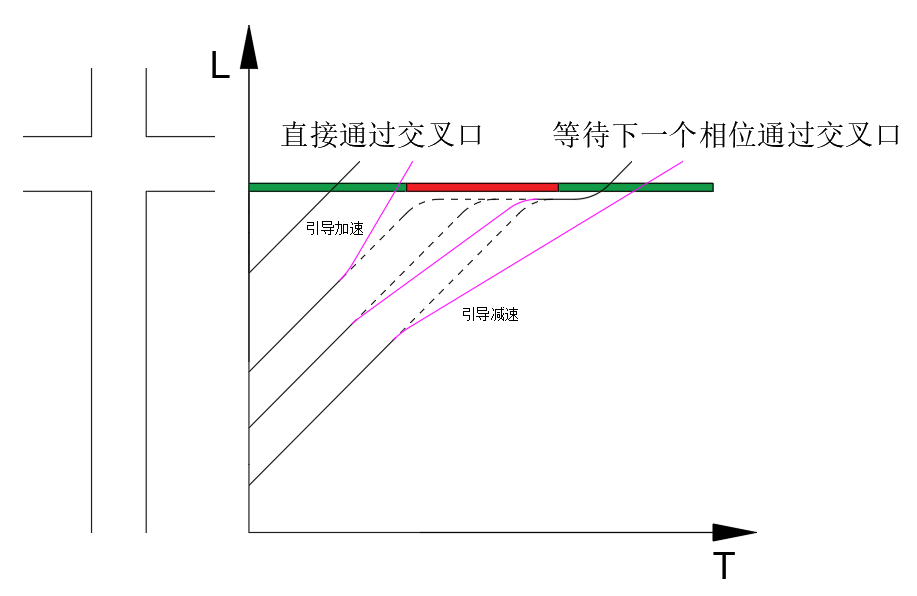
根据预测结果,将信号控制分为平峰时间段与高峰时间段两种模式。在高峰时间段,优先保证车辆能够以高通过率通过交叉口;在平峰时间段下,以减少车辆停车延误为目标减少交叉口延误和空气污染问题来优化信号配时方案,建立信号配时优化模型。并对交叉口车辆进行车速引道提高交叉口通行效率。
3.仿真实验检验和评价
为证明所建信号控制优化模型的有效性,通过实际交叉口案例仿真,根据实时获取的车辆时空信息对本文理论进行实证分析,利用VISSIM仿真软件进行二次开发对优化前后交叉口的通行效率进行仿真评价。
1.4 技术路线
论文在研究过程中,遵循阅读文献,发现问题,理论分析、数学建模、数据处理、仿真验证的技术路线。技术路线图如图 1-1所示:
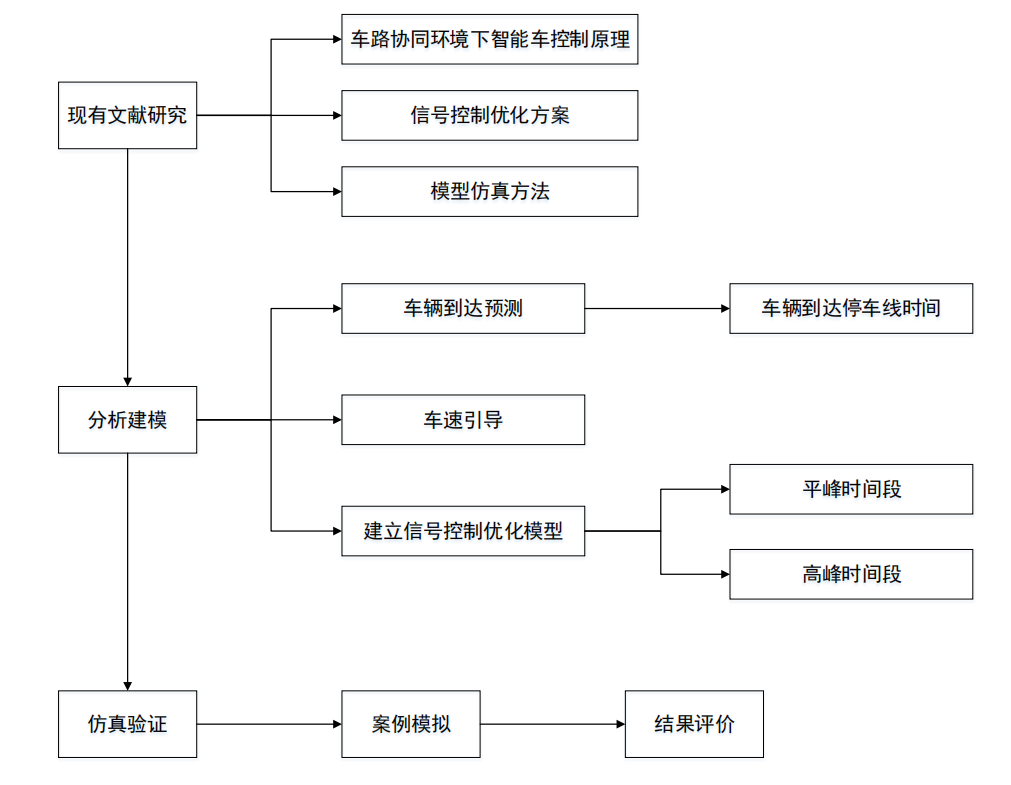
图1-1 技术路线图
第2章 车路协同环境下的信号交叉口系统分析
2.1 车路协同系统构成
车路协同系统(Cooperative Vehicle Infrastructure System,简称CVIS)属于车联网的高级阶段。采用先进的无线通信、模式识别、智能控制,以及新一代互联网技术等,全方位实施车车、车路之间的动态实时信息交互,实现车辆和道路基础设施之间的智能协作与配合,达资源优化利用,改善交通的安全,缓解道路交通压力的目的。
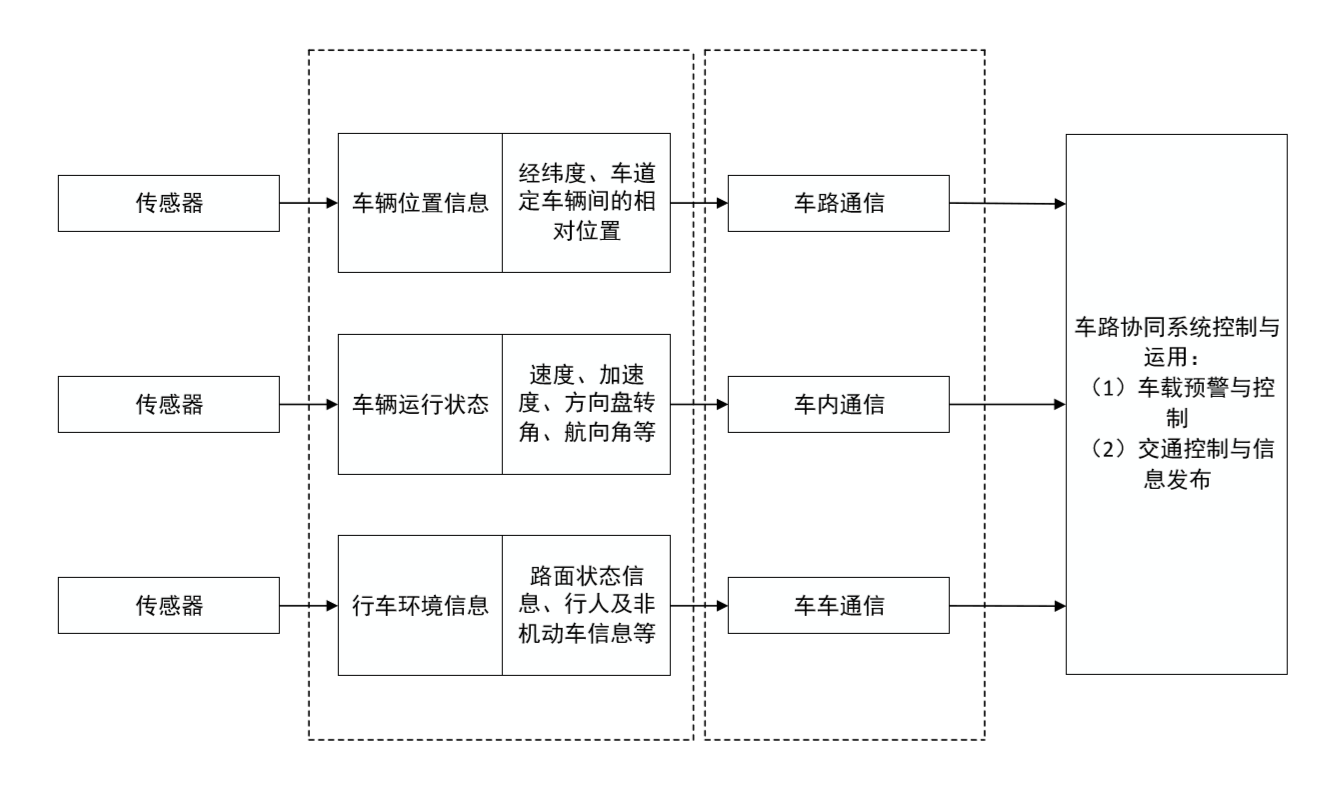
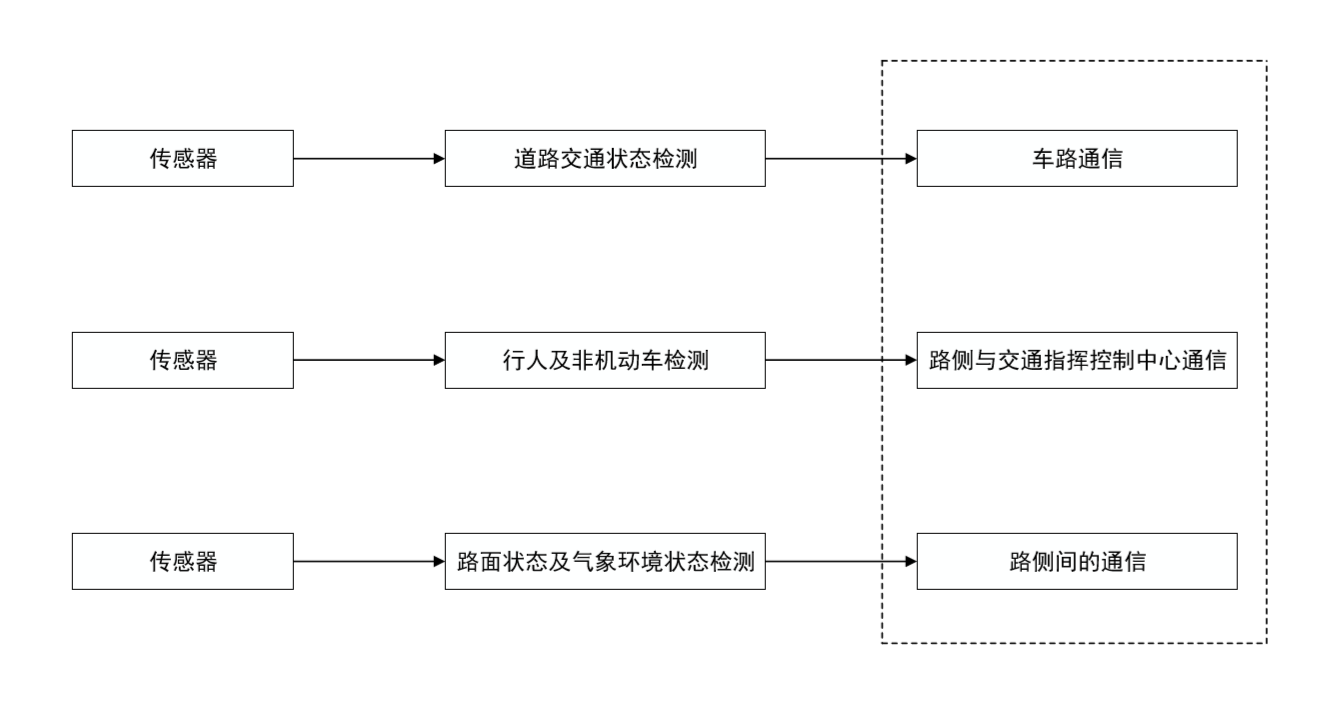
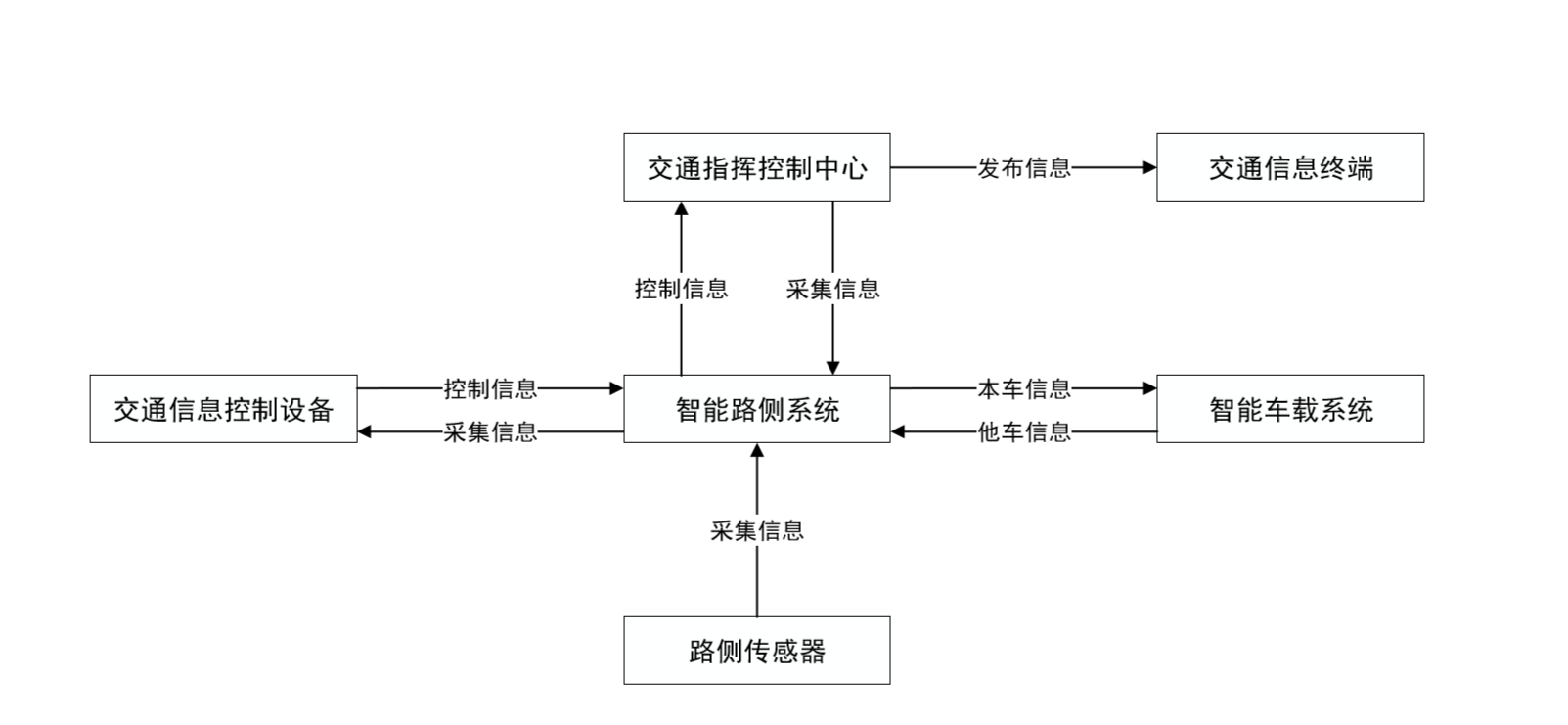
车路协同系统主要由智能路侧系统,智能车载系统以及车路/车车协同信息交互系统三个模块组成,其系统构架如图2-1所示。车路协同环境下的交叉口信号控制优化一般通过智能车载系统采集车辆的运行状态信息,如车辆的位置、速度、加速度等,通过无线通讯设备将信息传送至智能路侧系统。智能路侧系统对车辆、交通流、交叉口道路状况的各项信息进行汇总、分析、处理,通过优化模型计算出最佳信号配时方案,从而实现充分利用交叉口基础设施和道路的资源,提高通行效率,改善交通的安全,缓解交叉口交通压力的目的。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: