机场候机楼的行人引导标识优化外文翻译资料
2022-09-05 15:09:57
英语原文共 15 页,剩余内容已隐藏,支付完成后下载完整资料
机场候机楼的行人引导标识优化
1.引言
行人引导标识在机场候机楼的规划和设计中扮演了一个很重要的角色。一般来说,机场候机楼的特征就是具有复杂的内部结构,因此当行人要在许多路线中选择一条时有很大的可能会迷失方向。现有研究已经发现行人必须依靠引导标识来到达目的地或者在枢纽内找到正确的方向。在一个机场候机楼的内部,为了得到正确的方向,入口和出口处应该借助行人引导标识的帮助,这样的引导标识可以快速地引导人们学习对应的信息然后得到最佳的路径。因此,目前研究的重点放在行人在机场候机楼中行为。基于容量的模型正被广泛地使用,用以计算等待时间,服务时间或者机场枢纽内各项设施的排队长度。另一方面,基于布局的模型用来描述机场规划设计的适用性和效率。
估计机场候机楼的服务水平是近些年的另外一个研究热点许多模型,例如模糊逻辑模型,二元Logit模型和回归分析模型,已经在许多情况下得到了运用。但是,很少有研究根据一种最重要的设施去评估机场候机楼内部的服务水平的,那就是行人引导标识。
本文主要进行了机场候机楼内的引导标识特性分析,开展了结合行人特性,枢纽内部环境和标识位置的数值模拟。在行人群体行为特征的描述中,运用了满足行人自组织行为的环境。考虑到效率,可靠性和机场候机楼的特征,元胞自动机被用于实现机场候机楼的环境状态,基于由元胞自动机决定的人群冲突和拥挤环境而规划和构建出的引导标识定位模型。
本文剩下的内容概述如下。第2部分描述了行人仿真模型中的行人引导标识设置地点优化和运用条件的问题。第3部分建立了行人引导标识的特征模型。第4部分展示了行人的自组织特征模型。第5和第6部分讨论了引导标识对行人的影响。模型的运用在第7部分进行了描述。第8部分总结了研究成果并讨论了未来的研究方向。
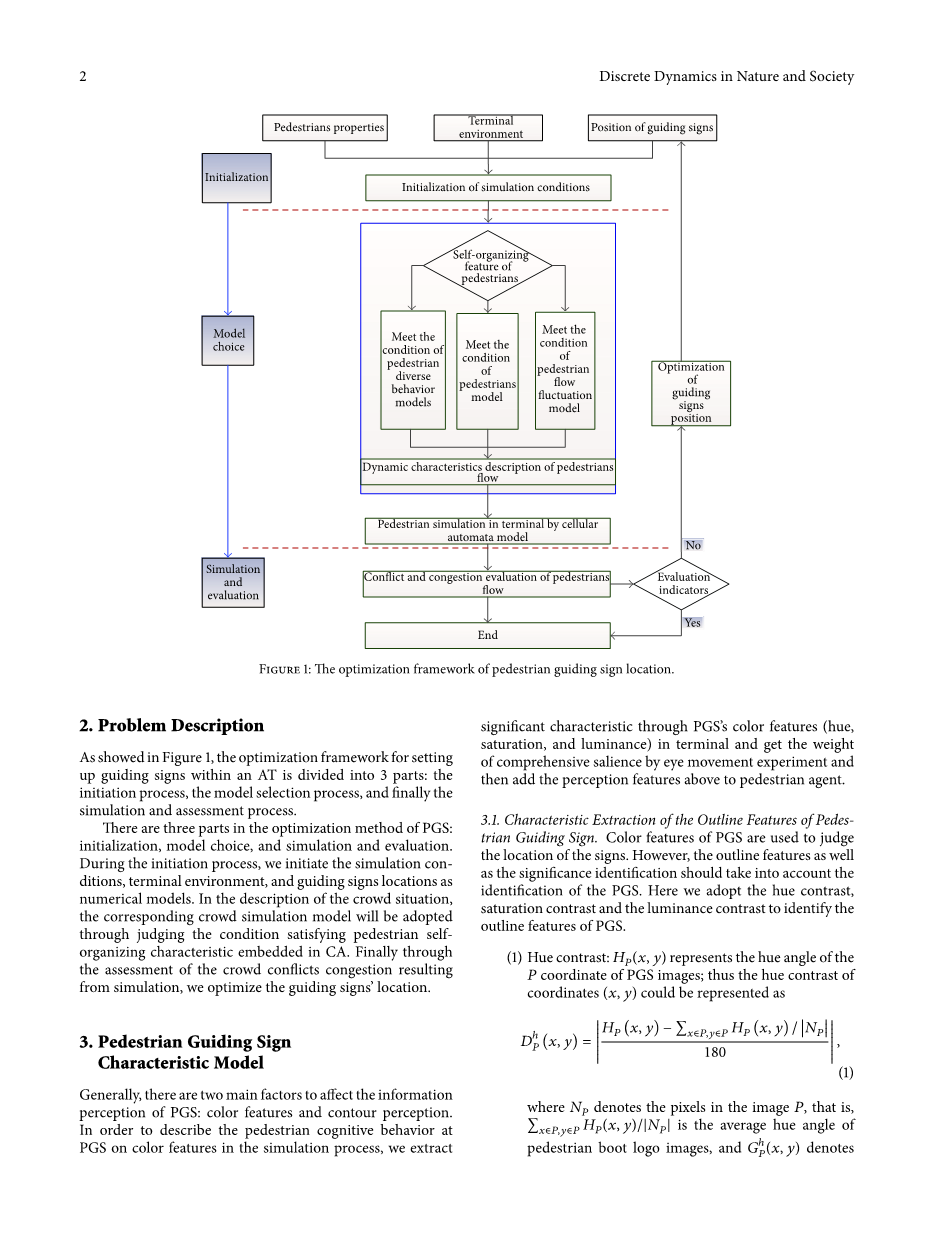
2.问题描述
如图所示,在机场候机楼内设置引导标识的优化构架被划分为3个部分:初始设定过程,模型选择过程和最终的仿真及评估过程。
行人引导标识的优化方法有三个部分:设置初始值,模型选择和仿真评估。在初始值设置的过程中,我们将仿真环境,枢纽环境和引导标识位置的数值模型初始化。在拥挤情况的描述中,通过判断元胞自动机内嵌的环境满足行人自组织特征,对应的拥挤仿真模型将会被采用最终通过评估仿真得到的拥挤冲突,我们优化引导标识的位置。
3.行人引导标识特征模型
一般有两个因素影响行人引导标识的信息观察:颜色特征和轮廓感知。为了在仿真过程中描述行人对引导标识颜色特征的认知行为,我们提取了引导标识颜色特征中的重要特性(色调,饱和度,亮度),并通过眼动实验获取了综合特点的权重,为行人智能体添加感知特性。
3.1 行人引导标识外形特征提取
行人引导标识的颜色特征被用来判断标识的地点。但是,外形轮廓特征作为重要的辨认特征应该纳入引导标识识别的考虑范围。这里我们运用了色调对比度,饱和度对比度和亮度对比度来确认引导标识的轮廓特征。
(1)色调对比度:HP(x,y)代表了行人引导标识的P坐标色调角度;因此色调对比度的(x,y)坐标可以被表示为:
当Np表示图像P的像素,那就是,表示了行人引导标识图像的色度角,并且G(x,y)表示像素点(x,y)rsquo;s色度对比度程度,所以G(x,y)=1-D(x,y)。
(2)饱和度对比度:S(x,y)代表了行人引导标识图像的饱和度坐标(x,y),所以饱和度对比度的坐标为
其中是行人引导标识图像的饱和度平均值。Gp(x,y)是像素(x,y)饱和度对比度程度,所以Gp(x,y)=1-Dp(x,y)。
(3)亮度对比度:Vp(x,y)代表坐标(x,y)处的行人引导标识图像的亮度值,所以坐标(x,y)处的亮度对比度可以按下式方法计算
当是行人引导标识图像的亮度平均值。Gp(x,y)是像素(x,y)处的亮度对比度,我们就可以得到Gp(x,y)=1-Dp(x,y)。
3.2行人引导标识轮廓边界判断
在使用颜色对比度,饱和度对比度和亮度对比度的数值用来提取轮廓特征的时候,我们让lambda;X和lambda;Y代表搜索轮廓特征的步骤中x和y轴上的方向。边界确认条件设置为GH,GS和GV,分别为引导标识色调,对比度和亮度边界阈值。主要特征的提取步骤如下所示:
(1)初始化x = 0,y = 0;
(2)x:= x lambda;X;
(3)如果x gt; XP,那么直接跳向第5步,否则继续;
(4)在计算出(x,y)和(x-lambda;X,y)两处的色彩,对比度和亮度对比度值之后,轮廓区域可以轻松地被判定。同时我们分类各个位置(x,y)为轮廓边界点集B,通过四个点(? – ?X,? – ?Y), (? – ?X,?), (?,?)和 (? – ?X,?)突出封闭区域的重要程度,然后跳向第2步;
(5)y:=y lambda;Y;
(6)如果ygt;YP,结束进程;否则x=0,跳向步骤2.
3.3 行人引导标识轮廓特征感知
(1)我们根据坐标Y从高到低将轮廓边界最外层的点进行排列。另外,我们在Y坐标下从低到高设置X坐标,为的是容纳一个新的边界点序列Brsquo;=(?1(?1,?1),?2(?2,?2),...,??(??,??)),这里的d?(??,??) ? = 1,2,...,?代表序列中的点。
(2)用eta;b表示引导标识轮廓特征的边界干扰噪音阈值,并且在半径内扫描区域所有点来搜集C;所有的显示区域的相邻点都显著性明显。
(3)使用Hough变换来辨认消除干扰之后的区域,并检测图片的轮廓边界。
(4)不同形状的图片,比如不规则的图片,等边三角形和圆形矩形,被选取为基础程度的引导标识对行人的影响。
4建立行人自组织特性模型
4.1行人分流行为模型
不同方向的拥挤人群会形成一种有序的不会占用太多对象空间的人流。行人在航空候机楼的行为主要包括减速和避让。不需要分流和与他人沟通,行人们会自动行人相反的人流。人流冲突点的数量取决于行走空间的宽度和长度,人群的输入和输出,波动和不同流向之间的冲突,这是最典型的自组织的案例。这种分流减少了不同流向之间的阻力和冲突,这样一来平均速度和对应的效率都可以最大化。当两股相对的人流相遇时,狭窄的通道首先形成。随着时间的流逝,行人流会变得更宽以减少对象方向的“摩擦”,这样一来会使同侧移动更快更流畅。行人分流也会自动定向。另外,行人分流行为模型的应用条件为,行人以容易辨认的流线相对行走。
图2是一副简化的行人转移图。用Lrn和Lrl表示前方和后方的行人的距离,对应的,使用Lln和Lll标识对面方向人流的前后行人距离,Sr和Sl代表前进和反向行人流路径选择时收到视觉影响的距离,Pr(Sr)和Pl(Sr)代表在Sr的范围内前进和反向人流的密度,同时Pr(Sl)和Pl(Sl)代表Sl范围内的前进和反向人流密度。行人流的形成和消散规则可由下证明。
(1)如果Pr(Sr)lt;=Plr并且Pl(Sl)lt;Pll,在前进和反向方向均不能形成人流。行人会自由行走或处于混杂状态。Plr表示了前行人流较低的阈值。Pll表示反向人流的阈值。
(2)如果Pr(Sr)gt;Phr并且Pl(Sl)gt;Phl,前进和反向的行人均会形成稳定的人流,这时人流之间的相互干扰会很小。Phr表示前进人流的阈值上限Phl表示反向人流的阈值上限。
(3)如果Pr(Sr)gt;Phr并且Pl(Sl)lt;=Pll,稳定的前进行人流以步长lambda;r扩张,反向稳定人流以步长lambda;l衰减。
(4)如果Pr(Sr)lt;=Phl并且Pl(Sl)gt;Phl,反向稳定人流以步长lambda;l扩张,另一方面,稳定前进人流以步长lambda;r衰减。
(5)如果Pr(Sr)lt;=Plr并且Plllt;Pl(Sl)lt;=Phl,那么稳定反向人流有扩张的趋势,前向稳定人流有衰减的趋势。除此之外,如果Pl(Sl)lt;=Pll并且Plrlt;Pr(Sr)lt;=Phr,前向稳定人流有扩张的趋势,反向稳定人流无论人流是扩张还是衰减都依据参数lrn,lrl,lln和lll。
4.2行人流波动模型
用a(k,t)代表k类行人在t时刻的加速度,用v(k,t)表示第k类行人在t时刻的速度,Delta;v(t)表示某行人与前方另一行人在t时刻的速度差,Delta;x(t)表示行人与前方行人之间的距离。W1(k,p)表示行人群中行人位置p的影响系数,其中p取1,2,3分别表示前、中和尾端。W2(k)代表行人加速度的影响系数。W3(k)表示现在行人与前方行人加速度对速度差的影响。W4(k)表示现在行人与前方行人加速度对距离的影响。结果我们可以得到行人在时刻t的速度为v(k,t 1)=v(k,t) a(k,t 1),根据这个公式,我们可以轻易地得到行人在下一个时刻的位置。
4.3行人群体行为模型
整体性是当一个人按照自己的行为行动时要与群体的态度和行为想适应。甚至当一个人知道别人的行动是一个整体,他也会参加并且采用相似的行为。如果一个行人不熟悉枢纽的环境,对于路径的选择不是很清楚,他会失去对自己的感觉和判断的信心,在自己无意识的情况下采取大多数人的感觉和判断,失去个人决断。为了增加准确性,人们更加倾向与别人同路。除此之外,这种从众性也会经常在出口处形成拥挤。本文会建立整体性模型来仿真拥挤出口处的疏散情况。
群体行为的产生条件。为了生成群体行为,在人群数量和移动方向上必须满足一定的条件,在阈值delta;以内的某一视野区域,如图3所示的以O为目标方向的行人密度是rho;,如果rho;gt;rho;c那么表示在这块区域内行走的人遇到了整体行为模型的情况,这里rho;c表示整体行为发生时的最小行人密度,S(delta;)表示可视区域delta;,而vr(k,t)表示行人k在t时刻的速度,这也表示了速度方向和目标O之间的夹角。
4.3.1群体行为的速度
Ve(k,t)代表k级行人在t时刻的期望速度,然后ve(k,t)=[1-p(k,t)]vn(k,t) p(k,t)vmax(k,t),vn(k,t)表示t时刻k类行人的正常速度,vmax(k,t)表示k类行人在t时刻的最大可能速度,p(k,t)表示k类行人在t时刻的出行紧急程度,其取值在0到1之间。在达到期望速度的前提下,我们从现在的速度和期望的速度得到下个时间段的速度;v(k,t 1)=v(k,t) ve(k,t)*eta;,v(k,t)和v(k,t 1)表示k类行人在t时刻和t 1时刻的速度,eta;表示加速和减速的系数。
4.3.2群体行为的方向
(1)如果pi;/2lt;theta;o(k,t)le;3pi;/2,行人的方向不受到群体行为模式的影响。那就是说,theta;o(k,t 1)= theta;o(k,t) omega;r,这里的omega;r是一个较小的随机数。
(2)如果theta;o(k,t)le;pi;/2或者theta;o(k,t)gt;3pi;/2,那么行人的方向就与行走速度和行人密度两者都有关。采用的规则是theta;o(k,t 1)= theta;o(k,t) omega;(rho;(t),v(k,t)),此处rho;(t)表示在时刻t在行人视野范围内的行人密度。omega;(rho;(t),v(k,t))表示考虑了rho;(t)和v(k,t)情况下行人行走方向的调整系数。
5.行人引导标识对行人的影响
引导信息的强度表现了引导标识对行人在特定区域的影响等级。影响等级与引导距离,引导信息和引导目的地有关联。如图4所示,区域delta;1指出了引导标识在视野范围内的作用。这意味着在delta;1范围内,人们能够看到引导标识并且有可能到达他们的目的地。另一方面来说,delta;2展示了收到引导影响的区域。这样做的意思是人们在这个区域内会确认是否有引导标识。
R(k,s,d)表示在k类行人与d方向的距离为s时收到的引导标识的引导效果:
此处lambda;v1(s)表示引导标识在视觉影响区域(delta;2le;sle;delta;)内的引导系数。lambda;v2(s)表示引导标识在视野影响区域(sle;delta;2)的引导系数,这是一个关于距离s和d(k)的函数,表示了k类行人的目的地方向。theta;v(d)表示期望方向与行人标识之间连线的夹角。theta;I(d)表示引导标识方向与行人目的地方向的夹角。在范围delta;2le;sle;delta;1以内,引导标识的主要任务是吸引行人进一步确认引导标识的位置。在sle;delta;2的范围内,引导标识的主要角色是通过展示在引导标识上的信息让行人知道现在的位置和目标方向之间的路径。
6.仿真模型的求解
上文建立的所有模型都将会在这一部分用来描述机场内的实际过程。
6.1登机检票程序模块
6.1.1元胞选择
这机会介绍元胞自动机模型来描述检票等级过程。在每
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[147280],资料为PDF文档或Word文档,PDF文档可免费转换为Word



