基于人工势场的全局路径规划方法研究与仿真毕业论文
2020-02-18 00:31:21
摘 要
随着智能化船舶的不断发展,智能船舶的相关技术受到了广泛地关注,国内外的很多学者就智能航行、智能船体、智能机舱、智能能效管理、智能货物管理和智能集成平台六个方面开展了相关的研究。其中智能航行作为智能船舶最基础、最重要的保障是指利用感知技术、控制技术、计算机技术等对船舶的外部环境进行感知和处理,实现船舶航行路线的自主规划以及对障碍物的规避。智能航行最核心的部分之一是对船舶自主规划路径算法以及避障算法的研究,它是船舶能够正常航行的前提。本文采用人工势场法算法对路径规划问题进行了研究。其主要内容包括以下两个方面:
(1)掌握了人工势场法的基本原理和传统人工势场法两个典型问题的成因,并在此基础上提出了基于势场函数改进,在斥力势场中引入了距离因子并且改变了斥力的方向,同时也提出了虚拟规划终点的改进,改进后的人工势场法在一定程度上对两个典型问题以及规划出的路径的长度进行了优化,完成了基本的路径规划流程。
(2)基于仿真平台设计了用于改进后的人工势场仿真实验的程序,并在仿真平台上完成了对改进算法的验证,得到了良好的效果。
关键词:路径规划、人工势场法、斥力势场、距离因子、虚拟规划终点
ABSTRACT
With the continuous development of intelligent ships, the related technologies of intelligent ships have attracted extensive attention. Many scholars at home and abroad have carried out in-depth studies on the six aspects of intelligent navigation, intelligent hull, intelligent engine room, intelligent energy efficiency management, intelligent cargo management and intelligent integrated platform. Among them, intelligent navigation, as the most basic and important guarantee of intelligent ships, refers to the use of perception technology, control technology and computer technology to perceive and process the external environment of ships and realize the autonomous planning of ships' navigation routes and the avoidance of obstacles. One of the most important parts of intelligent navigation is the research on the algorithm of route planning and obstacle avoidance. In this paper, the classical algorithm of artificial potential field is used to study the path planning problem. Its main contents include the following aspects:
(1)by learning to master the basic principle of artificial potential field method and the traditional artificial potential field method is the cause of the two typical problems, and based on the potential field function is presented on the basis of improvement, in the distance factor was introduced to the repulsive potential field in and change the direction of the repulsive force, also puts forward the improvement at the end of virtual planning at the same time, the improved artificial potential field method for two typical problems to some extent, and optimized the length of the path planning, completed the basic path planning process.
(2)Based on the simulation platform, a program is designed for the artificial potential field simulation experiment after improvement, and the verification of the improved algorithm is completed on the simulation platform, and good results are obtained.
Keywords: path planning, artificial potential field method, repulsion potential field, distance factor, virtual planning endpoint.
目 录
第一章 绪论 1
1.1研究意义与背景 1
1.2路径规划发展与研究的现状 2
1.2.1传统的规划方法 2
1.2.2智能路径规划方法 4
1.3本文的主要工作与内容安排 5
第二章 传统的人工势场法 6
2.1传统人工势场法的概念和原理 6
2.2人工势场法的势场函数 9
2.2.1引力势场函数 9
2.2.2斥力势场函数 11
2.2.3合成势场函数 12
2.3传统人工势场法缺陷的分析 13
2.4本章小结 15
第三章 改进的人工势场法 16
3.1基于斥力势场函数的改进 16
3.1.1新的斥力势场函数 16
3.1.1斥力方向的优化 18
3.2基于虚拟规划终点的改进 19
3.3改进后人工势场法对典型问题的处理 21
3.4改进后人工势场法对路径长度的优化 25
3.5本章小结 26
第四章 改进人工势场法程序设计框架与仿真 27
4.1仿真平台的简介 27
4.2地图的搭建和处理 27
4.3程序的设计思路和框架 29
4.4仿真实验与结果分析 31
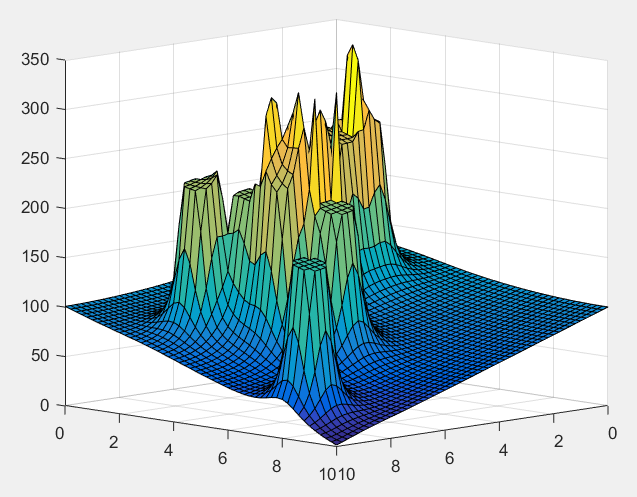
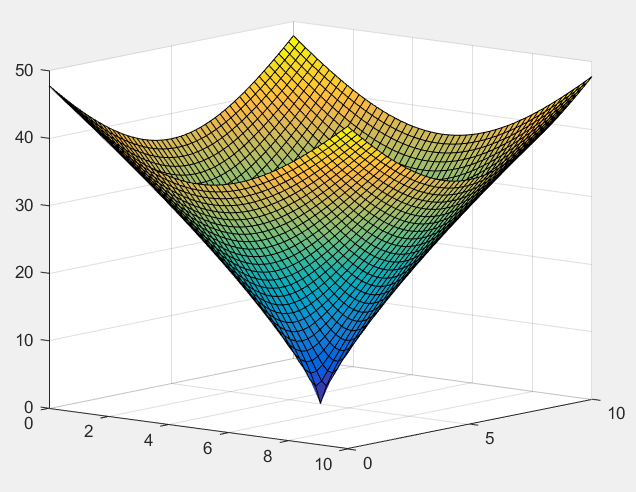
4.4.1模型假设及参数设定 31
4.4.2仿真结果及分析 32
4.5本章小结 40
第五章 总结与展望 41
5.1本文工作总结 41
5.2不足与展望 27
参考文献 42
致 谢 44
第一章 绪论
1.1研究意义与背景
随着科技的不断进步,近年来云计算、大数据、虚拟现实以及人工智能等技术得到了快速发展,“智能化”、“无人化”的概念在社会的各个领域不断被提及,在各个领域的应用不断被探索,交通领域作为社会生产的一个重要方面亦是如此。交通领域作为引入智能化技术最早的领域之一,随着技术的不断深入,无人飞行器和无人汽车已经取得较大的成果,都已趋于实用阶段。但作为交通重要方向的船舶领域,无论是小型无人艇还是大型的智能船舶其相关的研究都落后于其他两个方面,由此无人艇和智能船舶的研究开始得到了广泛地关注和发展。
国内外航海领域的各大公司和研究机构近年来已经对智能船舶开展了一系列的研究和探索。国外方面,2015年7月英国的罗尔斯·罗伊斯公司投入660万欧元进行先进的自动化水上应用项目,在2016年4月展示了智能无人驾驶货船岸基控制中心用以营运的版本,对未来无人航运的概念进行了阐述。随后发布了“高级无人驾驶船舶应用开发计划”项目的白皮书,展望了无人驾驶船舶广阔的未来,并认为无人船在未来的某一天一定会成为现实[13]。2016年7月韩国现代重工集团与SK 航运、微软、英特尔等公司合作,并计划2019年在研发的智能船舶上搭载用于船舶服务的软件,构建智能型船舶的生态系统,这意味着韩国开始了对传统船厂的智能化改造,并且建造的船舶类型开始向智能化的高附加值船舶靠拢[13]。2016年挪威海事局和挪威海岸管理局在特隆赫姆峡湾建成了世界上第一个智能船舶测试区,标志着挪威将智能化船舶技术的探索提升到了国家层面上[13]。国内方面,《中国制造2025》明确将智能化技术作为未来10年海洋工程装备和高技术船舶领域需要重点掌握的技术。在2017年12月6日上海举办的海事展期间,中国无人船领跑公司之一的云州智能与中国船级社、珠海市政府以及武汉理工大学三方联手合作,启动了世界上首艘商业用途的小型无人货船研发项目,预计在2019年研制的小型无人货船将投入使用,开启无人航运的篇章。
目前,国内外众多机构与企业对无人艇与智能船舶开展了深入的理论研究、技术研发和试验工作,其原因主要有以下几点:第一,一般认为大于80%的海上事故都与人为因素有关,而智能船舶由于可以通过自动控制技术和智能感知技术对航行过程中的问题做出预判,对船员的错误行为以及船员未发现的危险进行修正或是规避,在很大程度上避免由人为因素导致海上事故,增加船舶航行的安全性[19]。第二,船舶营运的很大一部分支出与船员有关,其中远洋船舶人员费用的支出占成本的比例高达44%。随着社会的发展,从事船员行业的人不断减少,劳动力成本持续的升高,开展智能船舶的研究可以减少船舶上人员的配置,提高船舶的经济性能[19]。第三,智能船舶需要的随船人员很少,当智能船舶发展到一定的高度时可能不再需要配备随船人员,由人所造成的海洋污染将降到最低,而且由于为船员配套的设施减少,使得船舶的重量减轻,能源的消耗减少[19]。预计,一艘无人驾驶货船的运营效率将有望提高最多 20%,且同时减少 20%的碳排放量,对于这些船舶领域的突出问题,智能船舶的研究工作无疑是至关重要的。《智能船舶规范》中将智能船舶的体系分为智能航行、智能船体、智能机舱、智能能效管理、智能货物管理和智能集成六个模块,智能航行作为其中重要的组成部分具有很高的研究价值。这一大的背景下,本文就智能船舶智能航行部分的路径规划方面采用人工势场法进行学习和研究。
1.2路径规划发展与研究的现状
智能船舶路径规划问题是指智能船舶在航行时,按照某一标准从已知或未知的环境中搜索出一条由开始位置到规划终点的最优或次优无碰撞路径。一般路径规划主要从以下三个方面去评价[11]:
(1)可行性:要求算法为智能船舶规划出的路径能够使智能船舶从起始点到达规划终点。
(2)安全性:要求在规划路径过程中,智能船舶可以自主躲避所有的已知或者未知的障碍物并且智能船舶与障碍物的距离不大于障碍物的安全距离。
(3)高效性:在确保可行性与安全性的基础上,应当通过改进路径规划算法提高智能船舶路径规划的效率,例如路径的长度最小、整个移动时间最短等。
对路径规划而言,最重要的是进行路径规划的移动目标对外部环境快速、准确的反应,以及对障碍物的有效规避,经过大量学者的研究和探索对路径规划有了许多有效可行的方法,例如遗传算法、人工势场法、模拟退火法、神经网络算法、粒子群算法等。根据路径规划的方法是否加入了智能算法可以分为传统的路径规划方法和智能的路径规划方法,下面将以这种分类介绍路径规划的方法。
1.2.1传统的规划方法
1.可视图法
可视图法在1979年由麻省理工学院的Lozano和IBM研究院的Wesley提出的,原理示意图如图1-1所示。这种方法的基本原理是当障碍物是不规则的几何图形时,直线连接起始点及障碍物轮廓的各个顶点,注意障碍物不能被穿越,然后利用某种搜索方法寻找一个从起始点到规划终点的最优路径。在可视图当中所有的连线上都没有障碍物,移动目标沿着直线走过的路径都是安全的路径。利用可视图法进行路径规划的基本步骤是:
- 在空间内将起始点、规划终点及障碍物标注好位置。
(2)用不穿越障碍物的直线将障碍物各顶点与起点及规划终点相连接。
(3)采用搜索算法如Dijkstra算法寻找最优路径[22]。
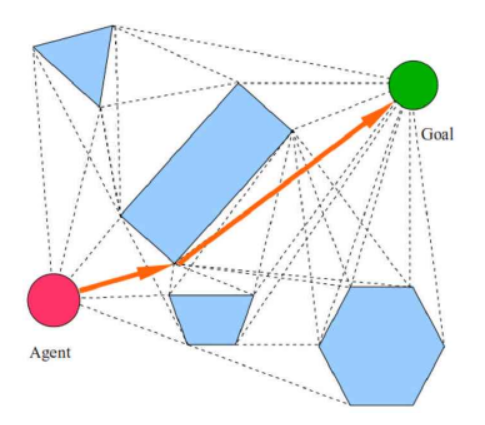
图1-1 可视图法原理示意图
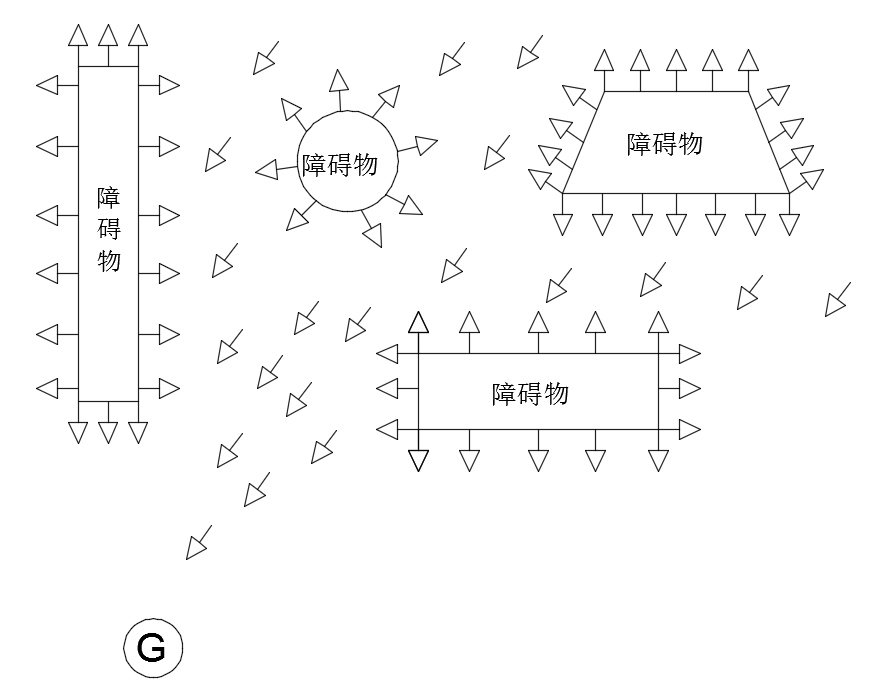
2.栅格法
栅格法又称为单元分解建模法,最早由Elfes和Moravcs提出,其主要思想将移动目标工作空间划分为具有多个二值信息的区域,也就是栅格。栅格又分为自由栅格和障碍栅格,将自由栅格定义为没有障碍物的栅格,将有障碍物的栅格定义为障碍栅格,然后对每个栅格进行一一编号,机器人路径规划就是搜索由起点到目标点的自由栅格组成的连通域,其原理图如图1-2所示。栅格法对环境的处理较为简单,但没有考虑环境分布的特点,在实际应用时对栅格大小的确定较为繁琐。
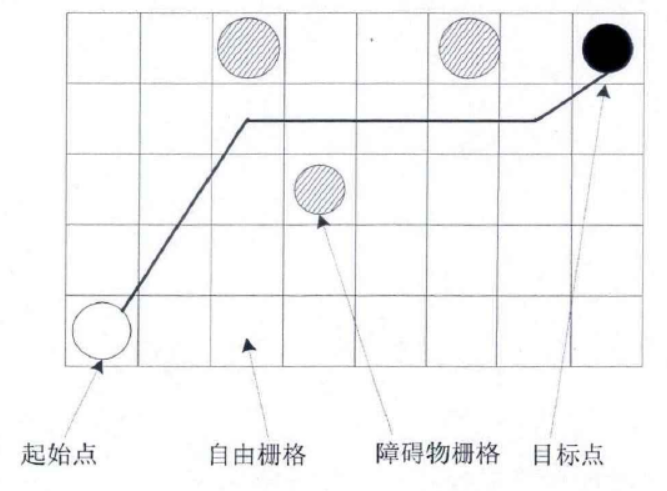
图1-2 栅格法路径规划示意图
用栅格法进行路径规划的步骤如下:
(1)建立栅格,将移动目标和规划终点间的区域划分栅格,栅格大小与移动目标的大小相关。
(2)生成障碍物地图,标注障碍栅格和自由栅格。
(3)利用搜索算法,如遗传算法,人工势场,神经网络算法等搜索无障碍的最优路径[22]。
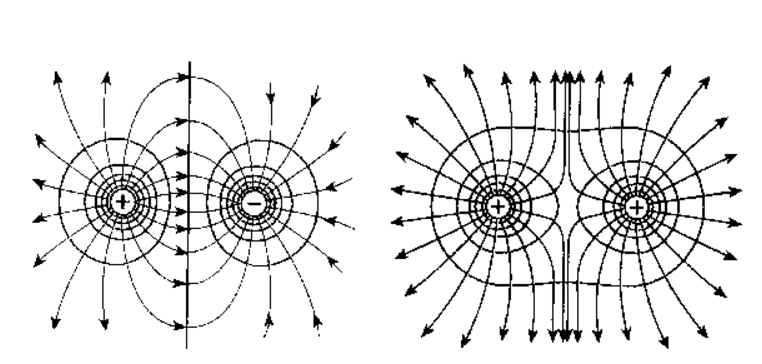
3.人工势场法
在1998年人工势场法被首次提出,该算法由于能在较为复杂的环境中找到一个路径规划的可行解,因此在现实应用和科研研究中被广泛的提及。该方法将移动目标在空间环境中的路径规划视为在人为构造的势场中的受力运动,与其他算法相比人工势场法模型简单、计算量小、规划路径平滑、具有很好的实时避障的效果等优点。但由于势场本身的局限性,人工势场法存在目标不可达、局部极小值等不足。针对存在的不足,研究者提出了很多的改进措施,卢恩超[26]等人结合边缘探测法采用“沿边走”的方式在一定程度上解决了局部极小值的问题,徐腾飞[27]等人引入了相对速度势场实现了机器人基于人工势场法的动态路径规划,刘传领[28]等人以设立虚拟子目标点产生引力的方法优化了机器人易陷入局部极小值的问题。
1.2.2智能路径规划方法
1.神经网络算法
在进行路径规划时外部环境可能是已知的也可能是未知的,当外部环境未知时需要通过传感器收集环境信息并对这些信息进行处理,指导下一步的路径规划。这是从感知层到行为层的一种转变和映射,但这种映射关系很难用一种确定的数学模型来描述,因此需要一种具有分析和联想能力的算法用以处理这种问题,基于这种原因将神经网络这种广泛应用于信息处理的智能算法引入到了路径规划问题当中。神经网络法是对人或者动物的神经网络的一种抽象、模拟和简化,这种网络是由大量的简单基本元件——神经元相互联接而成的自适应非线性动态系统构成的,每个独立单元的功能都较为简单但组合之后整个网络的功能又十分复杂,神经网络法能够对非线性的任意函数进行高度的近似,同时这种方法具有很强的鲁棒性和容错性,可以在一些极端的环境下仍能够保持对环境信息的处理和部分路径规划的能力,因此对复杂环境的路径规划具有较好的效果。
2.遗传算法
遗传算法由美国密歇根大学的Holland 教授提出,这种算法是基于生物进化和遗传学理论进行构建的,它模拟自然进化的过程搜索最优的解。遗传算法的基本原理是将所研究问题的解作为一个无规则的初始种群进行演化,以某种合理的评价指标去评价种群中的各个个体,通过选择、交叉、变异等一系列模拟遗传信息传递的方式筛选出适应度大的个体去建立一个新的种群,然后不断进行演化得到最优解。遗传算法不易陷入局部极小值陷阱,并且具有较强的全局搜索能力,但容易早熟收敛而只能得到局部最优解。
3.模糊控制算法
模糊控制算法引入路径规划的原因与神经网络算法相同,模糊控制算法与神经网络具有很多相似之处,这两者对于一个问题的处理都是通过模仿人与动物的特征来进行的,模糊控制算法是将得到的信息进行模糊处理后映射到相应的问题当中去,根据符合人思维模式的模糊逻辑对所求解的问题进行推理,然后以具有代表性的期望值对推理的解进行对比、选取,使的结果清晰化后输出,在路径规划中即是通过模糊处理得到正确的控制信号。在实际应用当中由于外部环境的复杂性,建立完整的模糊关系较为困难,一般用于局部的路径规划。
以上为路径规划发展过程当中的一些具有代表性的路径规划方法。
1.3本文的主要工作与内容安排
本文采用人工势场法对路径规划进行学习和研究,其主要工作是首先学习、理解人工势场法的基本原理、数学模型和工作流程。其次了解人工势场存在的典型问题,学习已有的对典型问题的解决方法,并在此基础上提出自己的一些想法。最后对改进的人工势场法基于仿真平台完成程序的编写与仿真实验工作,验证自己的学习内容及想法。论文的内容安排如下:
第一章叙述了智能船舶路径规划的意义与背景,并对路径规划的发展及发展过程中具有代表性的路径规划方法做了简单的介绍。
第二章主要介绍了人工势场法的原理和概念以及人工势场的组成部分,对其势场的特征进行了详细的叙述,并对人工势场法主要的问题做了研究为第三章的工作做了铺垫。
第三章主要基于斥力势场和虚拟规划终点对传统的人工势场法进行了改进,叙述了改进的人工势场法对两个典型问题处理,以及对规划路径长度的优化。
第四章是对改进后人工势场法仿真实验的设计和实验过程的介绍,以及对应的仿真结果与仿真结果的分析。
第五章是对全文的总结,对所做的研究工作进行了整理和归纳,对不足之处进行了讨论,为以后的学习和研究提供了参考。
第二章 传统的人工势场法
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: