基于单片机的转速测量与显示系统毕业论文
2020-02-17 23:04:12
摘 要
转速是一种很常见的衡量标准,虽然生活中不是常用,但是跟每个人都息息相关。动力除了直接给予外就是通过间接方式获得,而最好的循环不断地提供动力的方式就是不断旋转来循环提供,这就间接表明了转速这一指标的重要性了。本文对转速测量进行了研究,设计的是基于单片机的转速测量与显示系统,目的是了解转速测量的原理及常见方式,同时也加深对单片机的理解和在转速测量上的应用。
转速的测量通常通过测量频率来间接的获得转速值,这是适用于频率较高的情形使用,当需测量的转速频率较低通过测周期所得的数据更准确。为了更好地适应测量的需求,使用综合两种方式优势的方法可以为测量转速提供便利。经过测试,本系统采用测频率来测量转速在0~1500r/min的范围能满足实际要求,在测低速时有些许误差。
关键词:转速测量、单片机、频率测量
Abstract
Speed is a very common measure, although not commonly used in life, but with everyone is closely related. Besides direct power is obtained through indirect means, and the best way to continuously provide power is to continuously rotate to provide power, which indirectly shows the importance of the indicator of rotation speed. This article has carried on the research to the speed measurement, the design is based on the single chip computer speed measurement and the display system, the purpose is to understand the speed measurement principle and the common way, simultaneously also deepens to the single chip computer understanding and in the speed measurement application.
The measurement of rotating speed usually obtains the value of rotating speed indirectly by measuring frequency, which is suitable for the case of higher frequency. When the frequency of rotating speed to be measured is lower, the data obtained through the measurement period is more accurate. In order to better adapt to the needs of measurement, the use of integrated advantages of the two methods can provide convenience for measuring speed. After testing, the system USES the measurement frequency to measure the speed in the range of 0~1500r/min can meet the actual requirements, there are some errors in the measurement of low speed.
Keywords: speed measurement, Single chip microcomputer, frequency measurement
目 录
第1章 绪论 1
1.1 目的及意义 1
1.2 国内外的研究现状分析 1
1.3 转速测量的所需内容 2
第2章 转速测量与显示系统设计方案 3
2.1转速测量的原理 3
2.2转速测量的方法 4
第3章 转速测量与显示系统的硬件电路设计 6
3.1光电传感器输出信号整形电路 6
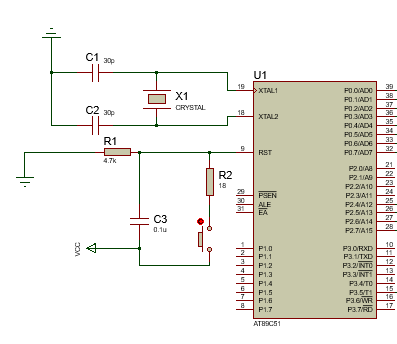
3.2单片机最小系统电路 10
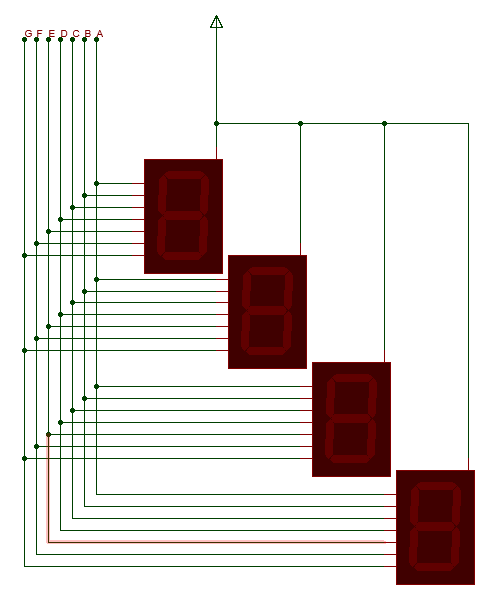
3.3显示模块硬件电路设计 13
第4章 转速测量与显示系统的软件设计 16
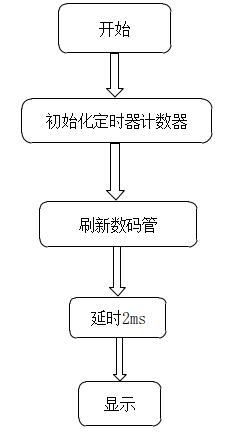
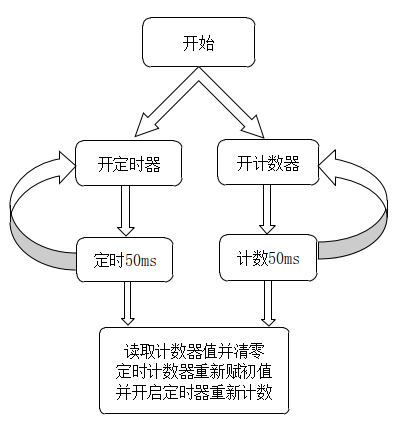
4.1转速测量与显示系统的定时计数模块软件设计 16
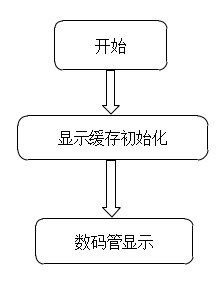
4.2转速测量与显示系统的显示模块软件设计 19
第5章 转速测量与显示系统的调试 21
第6章 总结与展望 24
参考文献 25
致谢 26
- 绪论
1.1 目的及意义
很多机器都需要发动机驱动,而转速是发动机的一个很重要的参数。随着数字化的高速发展,转速的测量方法也随之得到更好地提高,而其中用单片机进行对转速的测量比较广泛,因为单片机具有经济、低耗、体积小和性能好的特点,而且单片机对数字信号有着极高的处理能力。本次转速测量系统可以使用单片机进行数字信号处理,提高系统对转速测量的范围和精度。
转速测量通常通过间接数据的采集进行数据处理,进而转化为转速指标,其中数据采集的方式主要是霍尔转速传感器、磁电式转速传感器和光电传感器。光电式转速传感器,基本都是运用在齿轮上,其工作原理是通过感测齿片的数量来间接感测齿轮的转速,其感测的物体范围较广,但在一些无间隙,相同光度或相似光度的物体上面会有误差产生。
随着科技的创新与发展,单片机也有着很大的进步。STC89C51集成了特用的8位中央处理器和ISP Flash存储单元,具有在系统可编程(ISP)特性,省去了购买通用编程器,而且速度更快。单片机为核心的转速测量系统随着单片机的更新换代会更高效更精确地测量出数据,因此,基于单片机的转速测量系统有着很大的研究意义。
本设计研究的是电动机转速测量系统,对了解转速测量方法有很大的帮助,该设计主要是对电机转速测量系统进行软件和硬件的设计,同时从实际硬件电路出发,结合软件部分,分析电路的工作原理,设计出具体的方案和解决办法。
1.2 国内外的研究现状分析
目前有很多不同的理论方法来测量国内和国外的电动机的速度,先是发明了模拟测速法(如离心式转速表和电动机转矩计算法)、同步测速法(如机械式或光学频闪测速仪)以及计数测速法。比较传统的方式多是使用测速发电机或者光电数字脉冲编码器来对电动机进行旋转的速度测量,也有采用电磁式、电容式等器件来进行测量的,甚至还有一些特殊的测速器就是利用置于旋转体内的放射性材料来输出脉冲信号。其中光电式测速系统是应用的最多的,它具有低惯性,低噪声,高分辨率和高精度的优点。加上有激光光源、光栅、光学码盘、CCD 器件、光导纤维等光学器件的成功应用,使得光电传感器在测量和控制领域得到了广泛的应用。
随着科技的不断发展和进步,测量转速的方式从刚开始的接触式测量慢慢地转变为用非接触式方法来进行测量。其中模拟测速法就是属于接触式测量方式,而同步测速法和计数测速法则属于非接触式测量方式,前者虽然属于非接触式测量,但随着电子与数字化技术的逐渐普及应用而退居二线,被电子与数字化技术测量方式占据主要地位。电子类器件能占据主要地位的原因是这类器件用于测量相比较其他方式而言,其器件的体积小,质量轻便,加之这类器件采用了集成技术,测量的数据更为准确,而且能反映连续的转速变化。
目前利用电子数字化技术来测量转速的方法主要是利用光电传感器来实现,因为光电传感器对检测物体的限制很少,加之光本身为高速,响应时间短,还能集中光束使之分辨率相对更高。
1.3 转速测量的所需内容
在很多行业上都有测量转速的必要,特别是工业上,机械的驱动离不开电动机,而转速是衡量电动机性能的其中一种指标。在当前流行的对转速进行测量的方式主要是电磁式、光电式。
本文所进行的基于单片机的转速测量与显示系统的课题主要是了解转速测量的基本方法,并根据测量电动机的旋转速度的方法进行转速测量与显示系统的设计。
设计主要是利用光电传感器来获取电动机的旋转速度转化来的信号进行测速的方式进行设计,使系统可以测量0~1500r/min范围的电动机的转速,并能实时显示到数码管上。
- 转速测量与显示系统设计方案
2.1转速测量的原理
基于单片机的测量转速与显示系统进行转速测量的首个需要考虑的是就是如何把所要测量的转速转化成可以被单片机识别的脉冲信号,进而让单片机进行脉冲计数。转速是通过衡量单位时间内的转数来表示的,就是用来表示旋转这一多次重复的几近规律的运动状态的一种丈量标准。
根据霍尔效应的原理,将一块永久磁铁固定在转轴上的转盘边沿,当转盘随着转轴旋转的同时,磁铁也会随之同步旋转。若是在转盘下面放置一个霍尔元件,转盘随着转轴旋转的时候,霍尔元件受到磁铁随转盘旋转产生的磁场的影响,就会做出响应,输出脉冲信号,该信号的频率和转速成正比。通过测量霍尔元件输出的脉冲信号的频率就可以换算出转速。
光电传感器是根据光敏二极管工作原理制造的一种能产生电能的电子器件,提供独立和相对的光传输设备发射器和接收器,当从光发射器上产生的光不能被物体另一侧的接收器接收或者可以被接收器感应到时,接收器可以做出感应发出相应的电信号。以透射式光电传感器来说,当不透光的物体遮住发射与接收之间的空隙时,开关管断开,接收器没有发出电信号;与之相反的是,没有被物体遮住就会使得接收器感应到光信号,进而输出电信号。
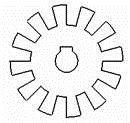
图2.1 遮光卡片
为了能够在转轴旋转一圈可以获得多个脉冲信号,提高测量信号的频率,方便更准确的测算出电动机的速度大小,则可以弄一个如图2.1所示的不透光的卡片,周围均匀的分布有可以遮挡光电传感器的光传输和光接收设备之间的信号的齿叶,将其固定在转轴上,然后在叶片的两侧分别对应有光电传感器的光发射器和光接收器,当电动机旋转的时候,会带动固定在转轴上的卡片一起旋转,此时电动机的旋转速度可以等效成卡片的旋转速度,如果卡片的齿叶旋转到光发射器和光接收器之间时,齿叶会将光发射器发射的光信号遮住,这个时候光接收器就接收不到光信号,等到齿叶旋转过去后,光接收器就可以继续接收到光信号,这时会输出一个脉冲信号;当卡片的齿叶的个数较多时,旋转一周就可以获得多个脉冲信号。这种传感器通过转化为脉冲信号的方式获取电机转速。先是通过对获取的脉冲信号进行处理,再经过单片机测量得出频率,通过频率值换算成转速值。
2.2转速测量的方法
无论是运用霍尔传感器还是运用光电传感器来测量转速的方法主要有三种:测频率法、测周期法和多周期测频率法。
测量频率法是给定一个测量时间,在该时间内统计输入的脉冲个数来测量出频率从而得出转速。假设给定的时间间隔为t0,被测脉冲信号个数在这段时间内计数值为g0,则被测脉冲信号的频率可以表示为F0。
测量周期法是测量相邻两个转速脉冲信号的时间来换算出转速。在被测脉冲信号的一次跳变的时间间隔内,测量时钟脉冲信号的个数,进而可以获得相邻两个被测脉冲信号的时间间隔,也就是被测脉冲信号的周期,再经过换算就能得出转速。
假定测量的时钟脉冲信号的个数为g1,时钟脉冲信号的频率用Fs来表示,则被测脉冲信号的周期为T0。
而多个周期测量频率法是测量被测脉冲信号的跳变次数,就是被测脉冲信号经过的周期数,也可以说是被测脉冲信号的个数,于此同时也对时钟脉冲信号的个数进行计数,最后通过公式换算确定转速。
假定被测脉冲信号的个数为g2,记录的时钟脉冲信号的个数为g3,时钟脉冲的频率为Fs,则有被测脉冲信号的频率F1。
如果采用霍尔传感器来对脉冲信号进行采样收集会出现采样不均匀,这是因为霍尔传感器是靠磁感应来输出脉冲信号,磁感应程度会在很大程度上影响脉冲信号的采集。若是使用光电传感器来获取脉冲信号就不一样了,光强的感应相对磁感应而言会更好,只要确保设置的采样用的遮光叶片的齿叶均匀的围成一圈,这样一来光电传感器的接收器就可以在电动机旋转一圈的时候有规律的获得多个光信号,然后有规律的输出多个脉冲信号。
因为是使用的数字电子定时计数的方式来测量转速,所以测量转速的准确率主要是有时间基准误差和量化误差来决定,当测量的数据数值越大,那么测量时造成的误差就会越小。
综合来看,测量频率法比较适用于测量频率高的信号;与之相对的是测量周期法,当转速较高时测量周期会降低其测量的准确性,所以更适合用于测量低频的信号;而多个周期测量频率法是对前两种方法的平衡,具有更强的适应性。
对于转速测量系统来说,一个衡量标准就是测量结果的准确程度分辨率的高低,一般的需要进行转速测量的物体转速不会很低,但考虑到测量转速的测量范围,所以本次系统设计采用测量频率法来进行转速的测量。
设置的测量时间为T,在设定的时间内的记录的输入脉冲数为G1;假设光电传感器采样输出的脉冲信号在转轴每次旋转一圈的脉冲个数为G0,转速为
- 转速测量与显示系统的硬件电路设计
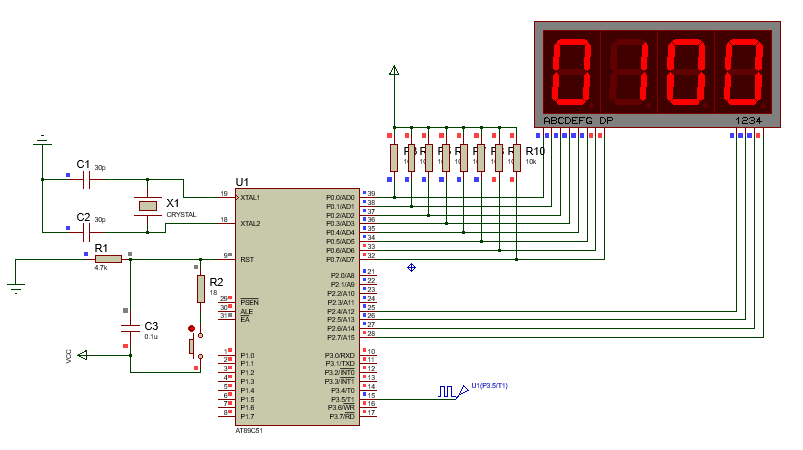
如图3.1所示为基于单片机的转速测量与显示系统的硬件设计总体原理图。
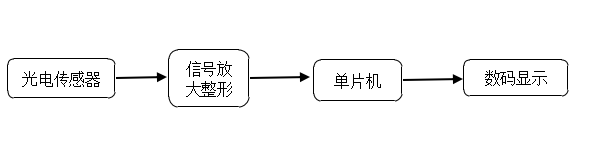
图3.1 系统原理图
转速测量与显示系统的硬件电路设计的思路是这样的,先是将光电传感器产生的输出信号输入到信号增大电路中,然后用信号增大电路对输入的信号进行增大处理,让经过放大后的信号需要满足单片机的电压要求,这样才能输入单片机后可以识别高低电平,之后接着将经过放大处理的该信号输入到整形电路进行波形整形,让经过放大处理的信号输出一个稳定的规律电信号,最后才输入到单片机让单片机识别电信号,然后对识别信号进行电动机旋转速度的测量操作,再将单片机测量出来的转速值使用数码管来显示出来。
3.1光电传感器输出信号整形电路
如图3.2所示为光电传感器输出信号整形电路的原理图。
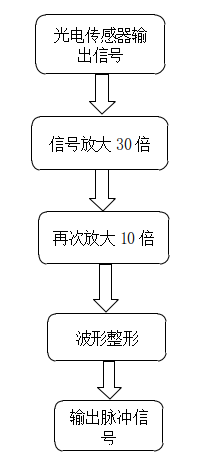
图3.2 整理波形电路的原理图
光电传感器输出的信号电压很小,不能直接输入单片机进行信号识别测量电动机的旋转速度,所以要先对光电传感器的输出信号进行信号增大处理,处理后的信号可能会出现波形失真的情况,这样的话单片机识别的信号就会存在不稳定的误差,影响测量数据的准确程度,所以还要再对增大后的信号进行信号的波形整理,这样整理后的信号输出就是单片机识别所需的脉冲信号。
信号增大电路选用运算放大器LM324作为增大电压信号的元件,由于用LM324构成的反相比例运算电路放大倍数有限制,因此使用两个反相比例运算放大电路来进行组合放大,连接的电路如图3.3所示。
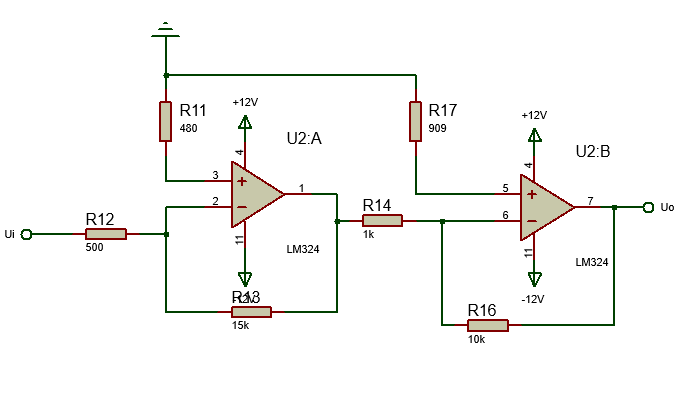
图3.3 波形放大电路图
波形放大电路的电压增大比例设计为增大300倍,其中左边一个LM324构成的反相比例运算电路的增大比例为30,右边的那个LM324构成的反相比例运算电路的增大比例为10,进行两次增大处理后电压的变化范围应该就是0~5V。输入信号从左侧Ui处输入到波形放大电路中,进入到第一个运算增大电路中。因为运算放大器LM324工作在线性工作区,所以可以用电路分析的两大法则“虚短”和“虚断”来判断电路的信号增大程度。
图3.3中运算放大器U2A的同相端,也就是3号引脚经电阻R11接地,这时“虚短”,所以电阻R11中经过的电流约为零,因此运算放大器的同相端是地电位,电压v3为0;“虚短”指出v2与v3电压值相等,得出反相输入端也就是2号引脚电位虚地。假定流经电阻R12的电流为,流经电阻R13的电流为,输入电压用 表示,输出电压用 表示,则有
因为2号引脚电位虚地,所以输入电流为零,加上电阻R12和R13串联,所以电流 与 的电流值相等,所以有
可以得出输入电压与输出电压的关系为
从输入电压和输出电压的关系可以看出来反相比例增大电路的增大倍数为电阻R13和R12的比值,公式前的负号表示的是电压的方向,而不是数值的正负,所以第一个反相比例运算增大电路的增大倍率是30倍。
为了保证运算增大电路的同相输入端和反相输入端处于均衡的工作状态,因此在选择同相输入端的电阻时注意与反相输入端的对地电阻相等。同理,第二个反相比例运算增大电路的电阻选择也是根据电压增大倍数来换算来的。
LM324内部整合了四个运算放大器,是具有真正的差分输入的通用运算放大器,适用于电源电压范围很大的单电源使用,也适用于双电源工作模式,单电源提供电压的范围是3V到32V,双电源的供电范围是1.5V到16V。它可以应用于传感增大器或者是直流增大的电路中,别的使用单个电源给予电压的运算放大器的电路中也有它的身影。放大电路中的LM324的4脚和11脚电源极外接12V的直流电压。
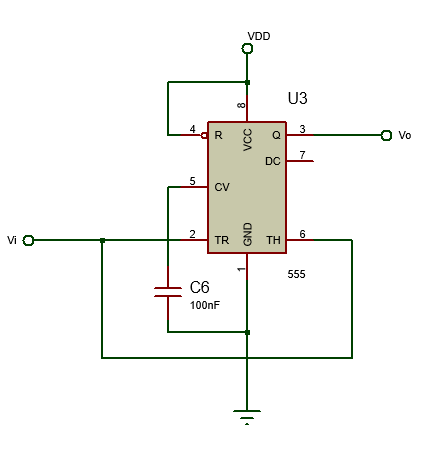
放大后的信号进行整形的目的是避免波形不好的脉冲信号对测量结果的影响,所以对波形不好的脉冲进行修整,使它整旧如新。整形电路设计用的是555定时器构成的施密特触发器来实现脉冲信号的整形。
555定时器是一种模拟和数字功能相结合的中规模集成器件,只需要用电阻和电容而不要使用其他元件就可以组合成施密特触发器这样的脉冲信号整理电路。
555电路含有两个电压比较器、一个基本的RS触发器和一个放电开关。其中比较器的参考电压由3只同等阻值的电阻分压,它们分别使高电平比较器A1同相比较端和低电平比较器A2的反相输入端的参考电压为电源电压的三分之二和三分之一。555定时器工作的电源电压的范围是4.5~16V。A1和A2的输出端控制RS触发器状态和放电管开关状态。当输入端的信号电压超过555定时器的电源电压的三分之二时,触发器复位,555定时器的输出端3脚输出低电平,同时放电,开关管通畅;当输入信号自2脚输入端输入的信号电压低于555定时器的电源电压的三分之一时,触发器置1,555定时器的3脚输出高电平,同时放电,开关管停止。
555定时器的4号引脚是重置端,若是这个引脚接地输入的电信号为低电平时,555定时器就会进行清零的操作,然后信号输出端就会输出低电平信号,一般都是不会用到这个引脚的。5号引脚用来做控制电压端,如果这个引脚没有外接电源,那么一般这个引脚所在点输出的电压大小是三分之二555定时器的电源电压;5脚通常接一个电容到地起滤波作用,以消除干扰,保持参考电压不变。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: